

一个典型的SLAM框架
描述
标定就是找到雷达到相机的空间转换关系,在不同的坐标系之间转换需要旋转矩阵 R 和平移矩阵 T,为后续的雷达和相机数据融合做准备:
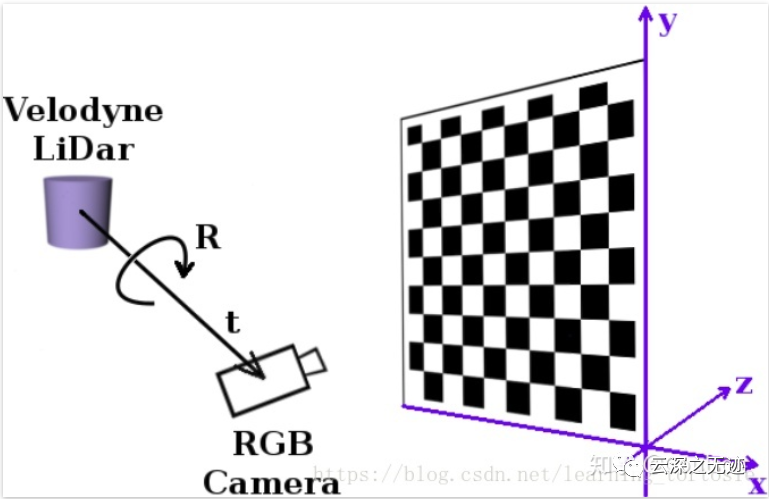
一个标定图
校准单目的相机
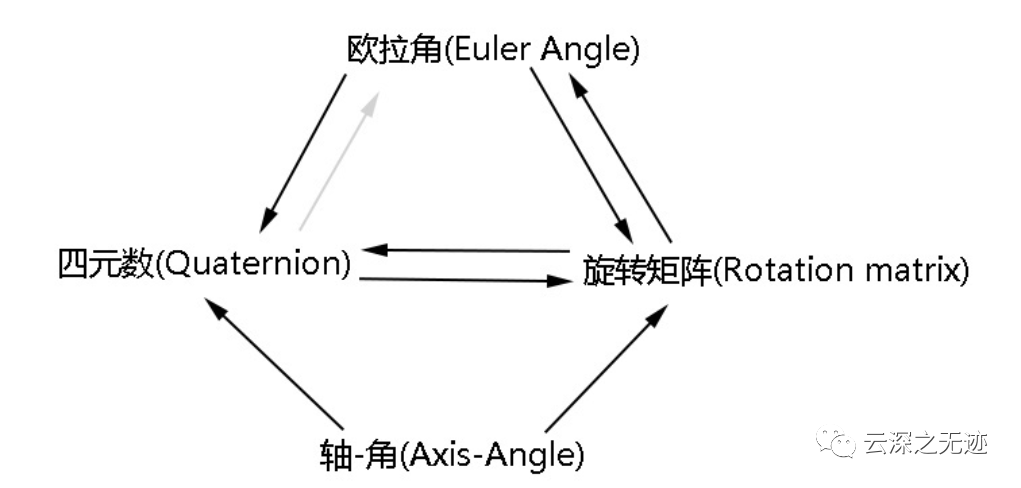
几种旋转控制的数学转换
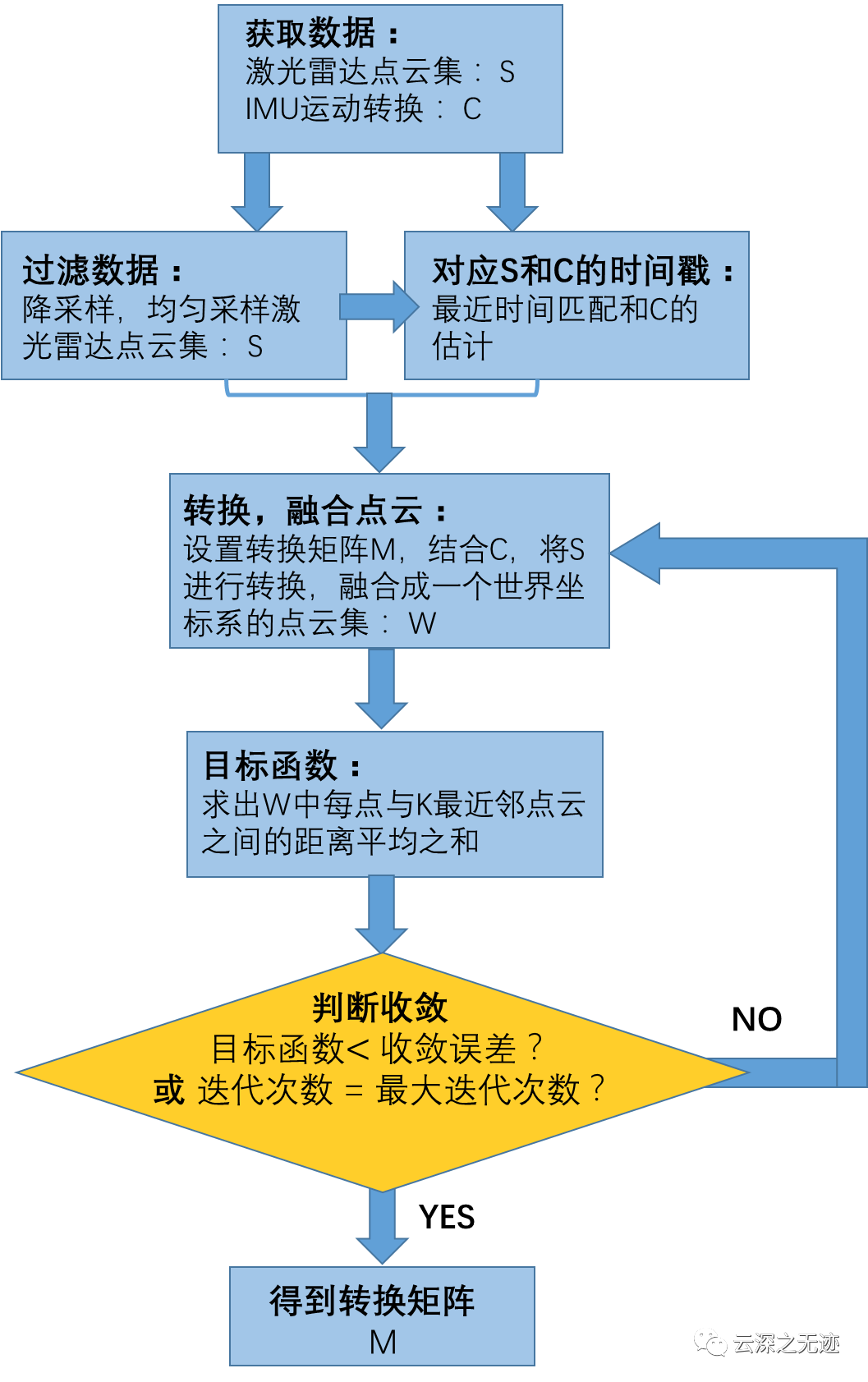
匹配的算法流程
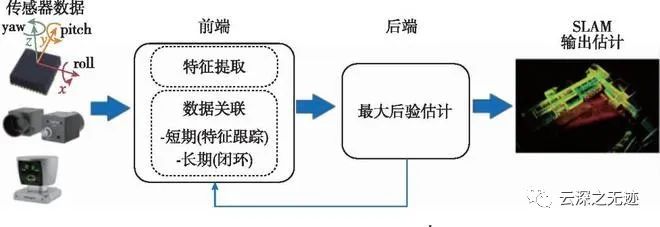
一个典型的SLAM框架
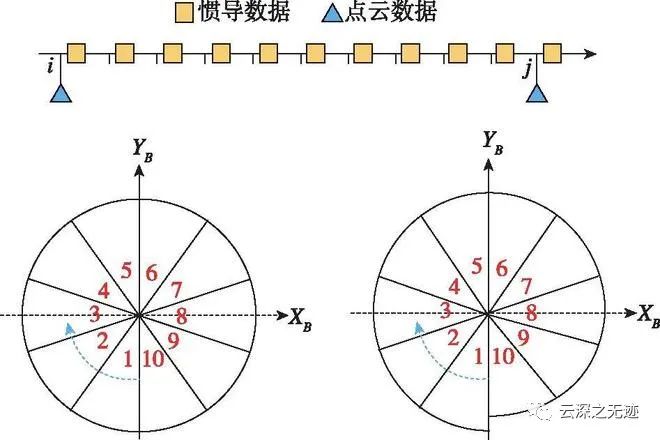
速度不太的传感器之间的信息使用
惯性/激光雷达组合SLAM
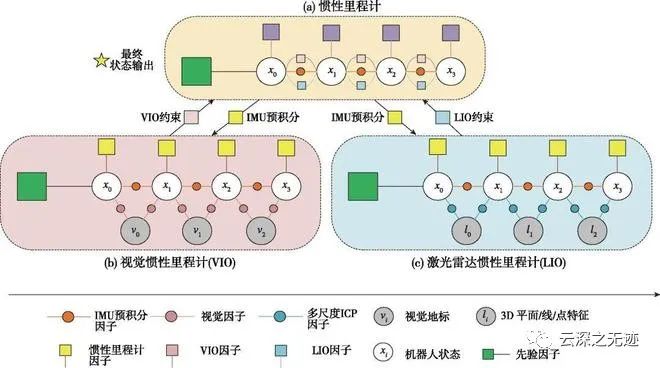
将惯性/视觉与惯性/激光雷达两种里程计进行融合示意图
惯性/视觉/激光雷达紧组合示意图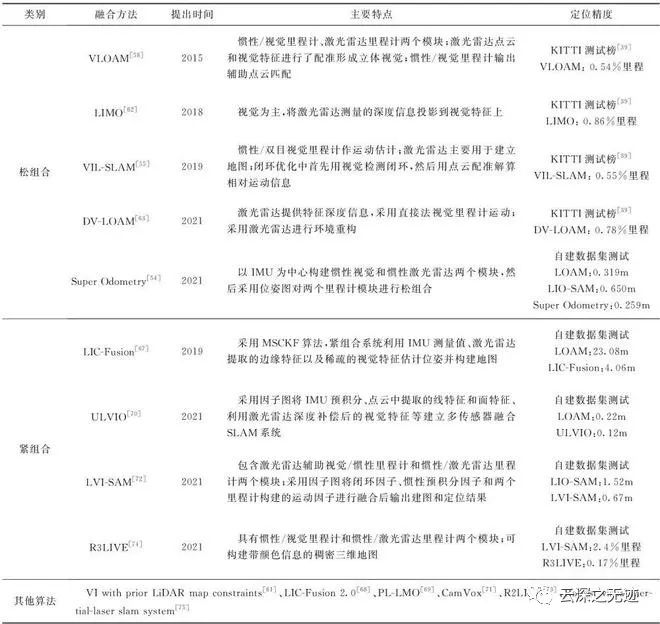
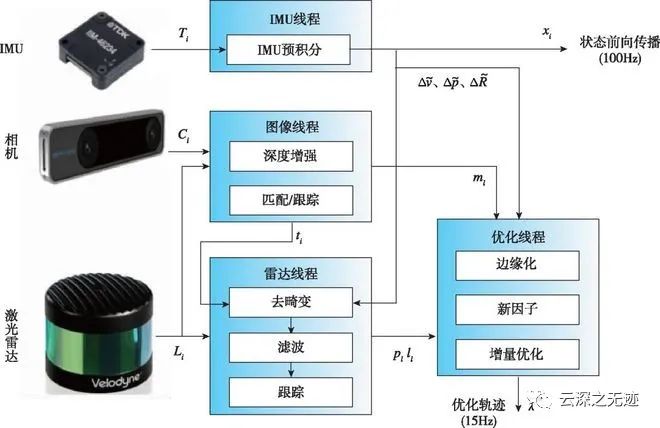
惯性/视觉/激光雷达组合SLAM
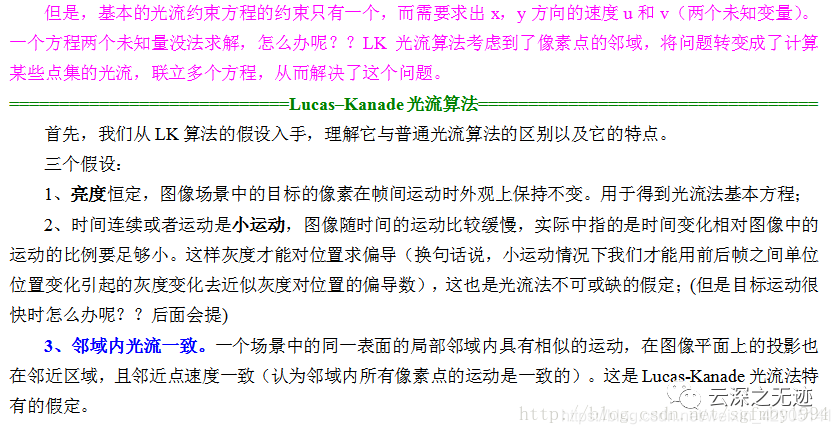
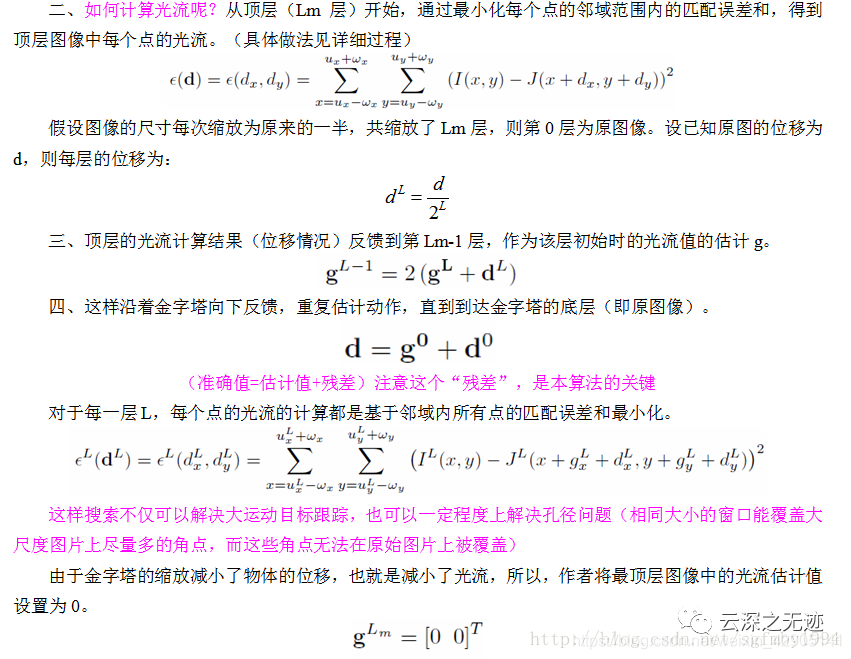
KLT 算法本质上也基于光流的三个假设,不同于前述直接比较像素点灰度值的作法,KLT 比较像素点周围的窗口像素,来寻找最相似的像素点。
这个SLAM确实是又多又难,自学有点费劲,还是应该找个课上一手,虽然我上课就犯困,但是这个事情上面是有必要的。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
GSLAM:一套通用的SLAM框架与基准2019-03-07 9592
-
基于多模态语义SLAM框架2022-08-31 2831
-
SLAM技术的应用及发展现状2018-12-06 15540
-
激光SLAM与视觉SLAM有什么区别?2021-07-05 4717
-
SLAM的相关知识点分享2021-08-30 2179
-
HOOFR-SLAM的系统框架及其特征提取2021-12-21 1735
-
几种典型的SLAM应用场景和它的解决方案2017-09-22 1951
-
SLAM导航技术的分类、典型应用及国内发展现状2020-12-31 9347
-
一种快速的激光视觉惯导融合的slam系统2022-11-09 2754
-
经典视觉SLAM框架开源方案2022-12-05 2182
-
基于LeGo-LOAM框架的3D激光SLAM技术2023-06-29 1523
-
视觉SLAM开源方案汇总 视觉SLAM设备选型2023-08-10 1924
-
视觉SLAM是什么?视觉SLAM的工作原理 视觉SLAM框架解读2023-09-05 5809
-
用于SLAM中点云地图综合评估的开源框架2024-12-13 1877
-
一种适用于动态环境的自适应先验场景-对象SLAM框架2025-08-19 1062
全部0条评论

快来发表一下你的评论吧 !
