

怎样去设计一种基于STM32单片机的智能手环脉搏心率计步器呢
描述
一:功能
基于STM32单片机智能手环心率计步器体温显示设计
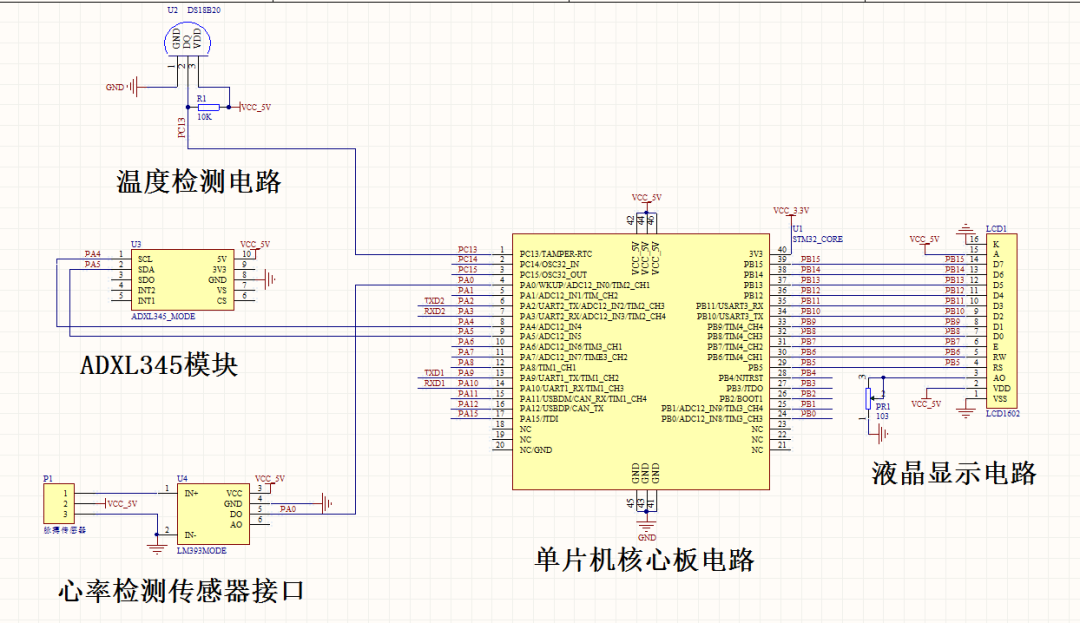
本设计由STM32F103C8T6单片机核心板电路+ADXL345传感器电路+心率传感器电路+温度传感器+lcd1602电路组成。
1、通过重力加速度传感器ADXL345检测人的状态,计算出走步数、走路距离和平均速度。
2、通过心率传感器实时检测心率,通过温度传感器检测温度。
3、lcd1602实时显示步数、距离和平均速度、心率以及温度值。
二:电路图
三:源代码
#include "led.h" #include "delay.h" #include "sys.h" #include "usart.h" #include#include "timer.h" #include "key.h" #include "exti.h" #include "adxl345.h" #include "lcd1602.h" #include "ds18b20.h" unsigned char ReadAdxl345; /* 定时读取adxl345数据 */ unsigned char ErrorNum=0; /* 记录错误次数 */ unsigned char CheckNum=0; /* 检测次数 */ char dis0[16]; /* 液晶数组显示暂存 */ char dis1[35]; unsigned int xlTab[5]; /* 心率数组 */ unsigned char count=0; /* 心率滤波计数 */ unsigned int xinLater=0; /* 心率延时处理 */ unsigned int xinLv =0; /* 心率值 */ unsigned int BuShu=0; /* 步数 */ unsigned int Normal_num=0; /* 正常次数 */ unsigned int Error_num=0; /* 倾斜次数 */ unsigned int disBuShu = 0; /* 显示步数 */ float disJuLi = 0; /* 显示距离 */ float temperature; /* 温度 */ unsigned char readTemp = 0; /* 读取温度标志 */ int main(void) { delay_init(); /* 延时函数初始化 */ uart_init(9600); /* 串口初始化为9600 */ TIM3_Int_Init(49,7199); /* 50ms */ EXTIX_Init(); /* 初始化外部中断 */ LED_Init(); /* 初始化与LED连接的硬件接口 */ KEY_Init(); /* 初始化按键 */ Lcd_GPIO_init(); /* 初始化lcd引脚 */ Lcd_Init(); /* 初始化lcd屏幕 */ delay_ms(200); Init_ADXL345(); if(Single_Read_ADXL345(0X00)==0xe5) { delay_ms(5); } else { delay_ms(3); } while(1) { if(ReadAdxl345== 1) /* 定时读取adxl345数据 */ { ReadAdxl345= 0; ReadData_x(); /* 三轴检测函数 */ CheckNum++; if((temp_Y>450)||(temp_Y<-450)) /* 查看正常次数 */ { Normal_num++; /* 正常次数++ */ } else { Error_num++; /* 倾斜次数 */ } if((Error_num!=0)&&(Normal_num!=0)) /* 检测到步数 */ { BuShu++; /* 步数脉冲量++ */ Error_num=0; /* 清除一个周期检测 */ Normal_num=0; } } if(disFlag==1) /* 显示标志 */ { disFlag = 0; readTemp++; /* 定时计数 */ if(readTemp >= 8) /* 约800ms处理一次数据 温度 */ { readTemp =0; /* 重新计数 */ temperature=(float)DS18B20_Get_Temp()/10; /* 缩小10倍为实际值 */ } disBuShu = BuShu/2; /* 显示步数 */ disJuLi = disBuShu*0.45; /* 显示距离 */ sprintf(dis0,"X:%03d/min %4.1f C",xinLv,temperature); /* 打印 */ Lcd_Puts(0,0,(unsigned char *)dis0); /* 显示 */ Lcd_1Put(14,0,0xdf); /* 显示符号 */ sprintf(dis1,"BS:%03d JL:%4.1fm ",disBuShu,disJuLi); /* 打印 */ Lcd_Puts(0,1,(unsigned char *)dis1); /* 显示 */ } } }
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于STM32单片机智能手环心率计步器体温显示设计2023-04-11 4016
-
怎样去设计一种基于STM32L151C6单片机的智能垃圾桶呢2022-02-28 1405
-
怎样去设计一种基于Arduino Uno单片机的智能小车呢2022-02-21 1359
-
怎样去设计一种基于单片机的心率监测LED灯辅助睡眠系统呢2022-02-17 1347
-
怎样去设计一种基于单片机的智能门禁系统呢2021-12-21 1844
-
基于STM32的智能手环系统该怎样去设计呢2021-11-17 3177
-
怎样去设计基于STC89C51/52单片机的心率计脉搏测量仪呢2021-10-26 3238
-
怎样去设计一种基于单片机的智能窗帘呢2021-10-22 1297
-
怎样去设计一种基于STM32的智能手环系统呢2021-10-20 3011
-
怎样去设计一种基于51单片机的脉搏测量仪呢2021-10-19 2104
-
怎样去设计基于STM32的智能手环系统2021-08-16 1892
-
怎样去设计一种基于STM32的智能手环系统2021-08-04 2091
-
怎样去设计一种基于51单片机最小系统的跑步机霍尔测速脉搏心率检测仪2021-08-03 1897
-
求一种基于STM32单片机的智能手环心率计步器体温显示方案2021-07-16 3024
全部0条评论

快来发表一下你的评论吧 !
