

ABB工业机器人50296报错问题解决方案
机器人
555人已加入
描述
ABB工业机器人有发生过机械手存储器数据差异50296这个报错问题点。跟kuka机器人报错性质大致相同,是为什么呢?直接看下面今天教你如何解决!
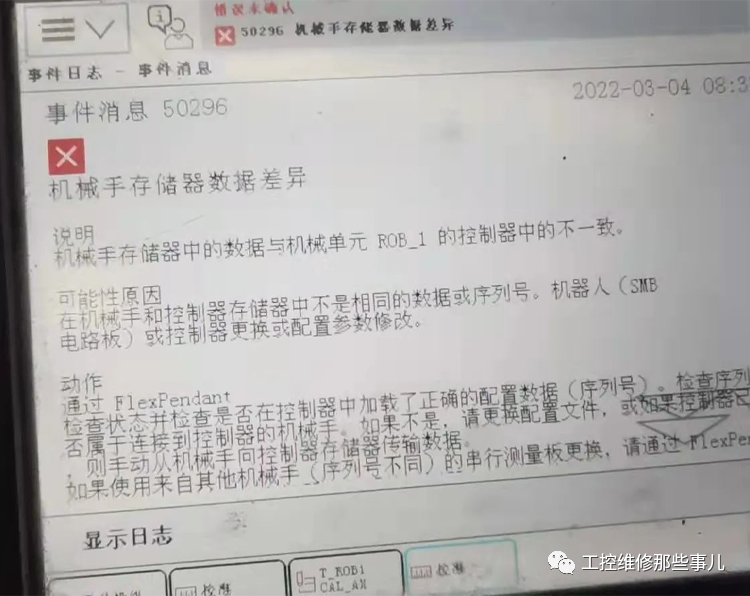
01、机械手存储器数据差异50296
解决方法:
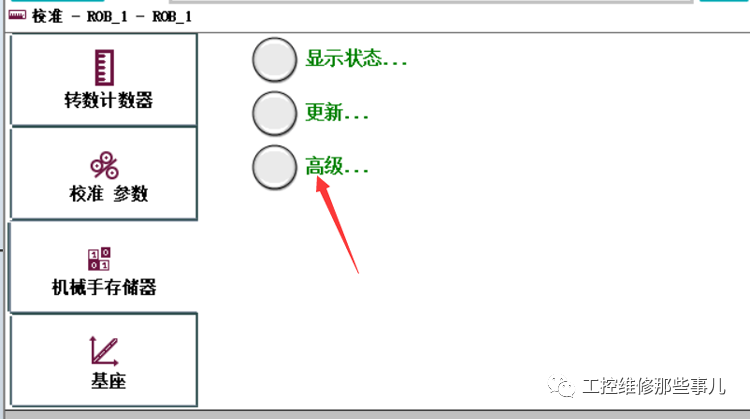
清除机器人内部原有内存;
按照下方顺序点击:
ABB校准ROB_1机械手存储器高级
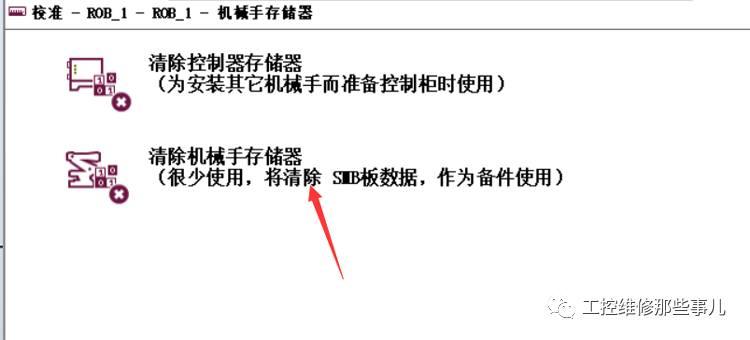
进入到“清楚控制柜和清楚机械手储存器管理界面”清除机器人的储存器。
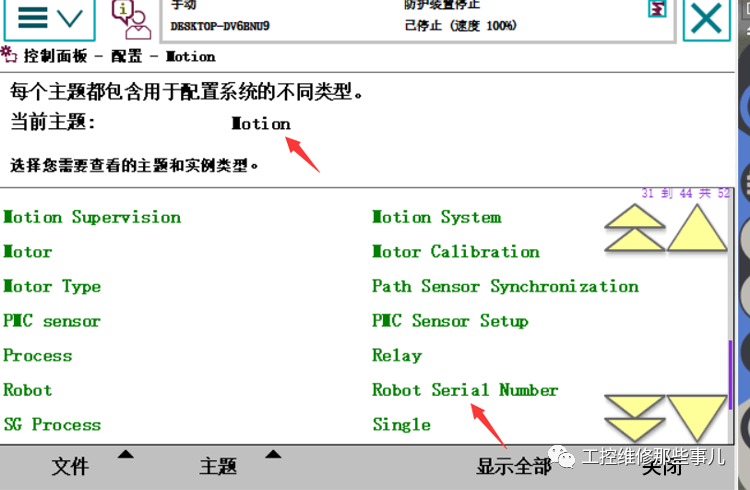
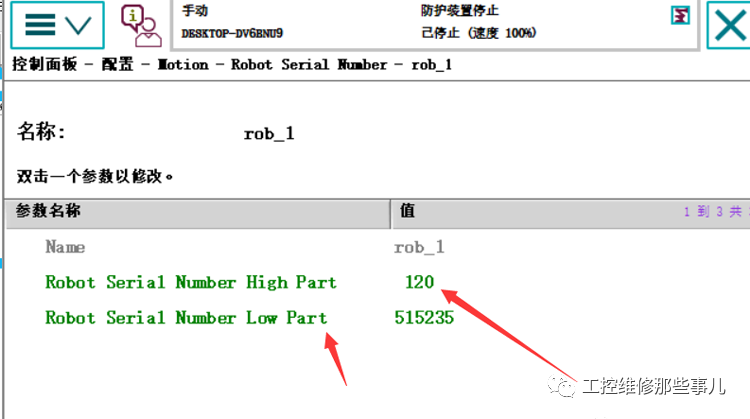
机器人序列号写入,以120-515235为例;
按照下方顺序点击:
ABB控制面板配置主题MotionRobotSerial Numberrob_1
进入“机器人序列号管理界面”分别在“robot serial number highpart”写入“120”,在“robot serialnumber low part”写入515235”,输入完毕后请重启机器人。
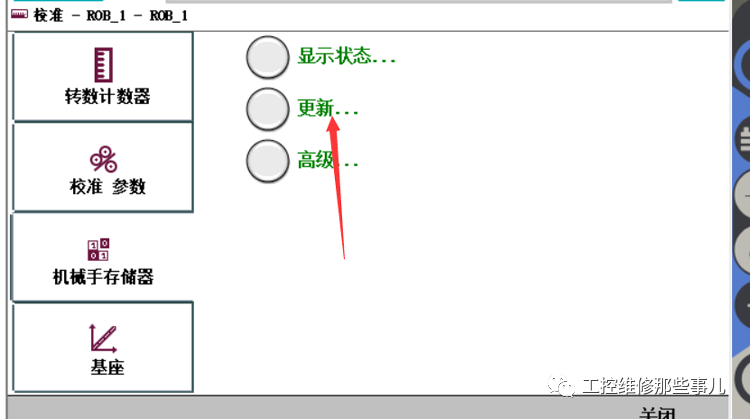
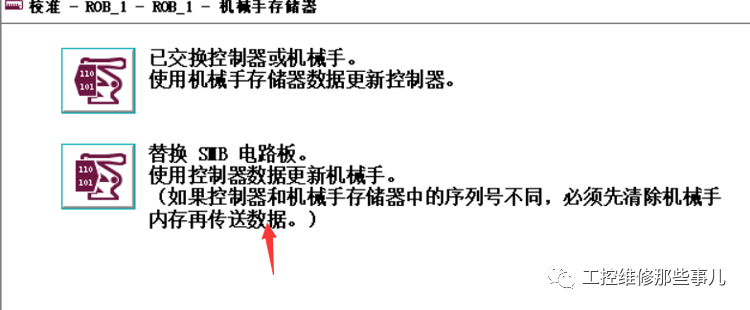
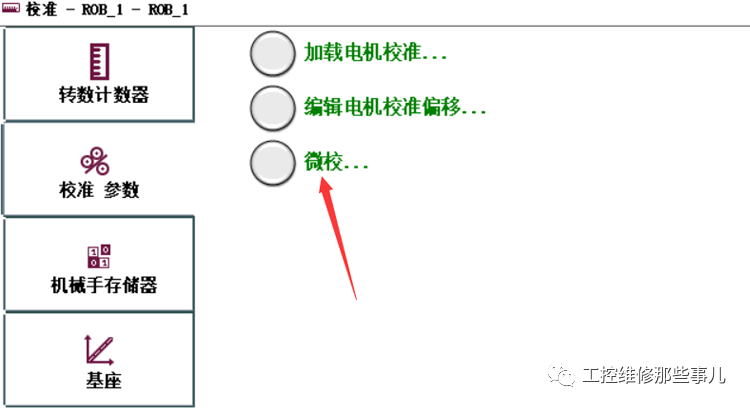
紧接着点击机械手储存器更新的界面,选择清楚SMB电路板,最后微调零点,(或者零点校准也可)步骤如下所示。
-
-
-
-
-
-
02、关节未同步50057
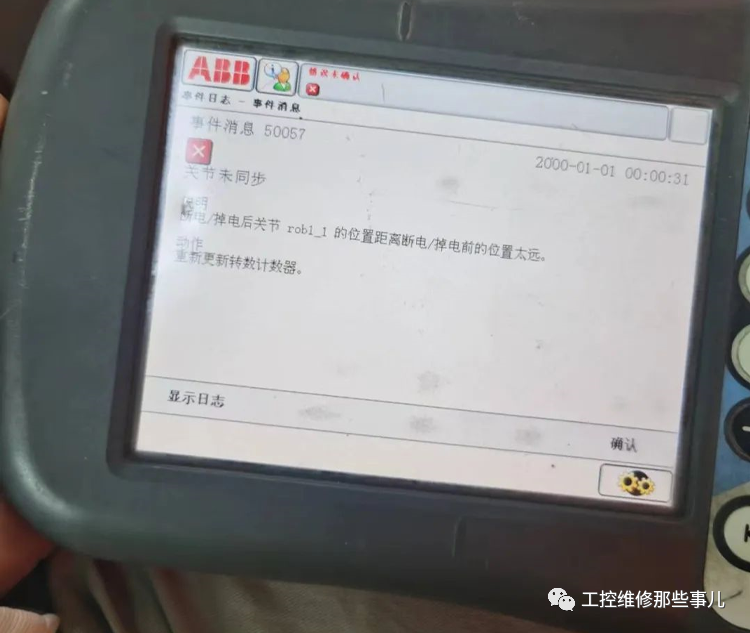
这个问题比较好处理
只需要进去 B启动即可搞定。

编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ABB IRB5400-喷涂工业机器人2015-01-14 10224
-
什么是工业机器人2015-01-19 6815
-
ABB焊接机器人问题2017-10-16 5719
-
零基础玩转工业机器人2018-10-29 5071
-
青岛ABB工业机器人无法正常进入系统故障维修2020-07-16 2085
-
ABB机器人维修保养指南2020-08-19 6057
-
ABB机器人实训平台实验2021-07-01 2842
-
基于TRIZ轮式机器人驱动轮的研究2021-09-13 1507
-
ABB工业机器人的基础教课2015-12-23 1748
-
abb喷涂机器人哪种好_十款abb喷涂机器人推荐2018-03-12 23886
-
ABB工业机器人解决方案2018-11-06 7011
-
ABB的机器人解决方案最终选择了IRB6400机器人2020-12-09 5020
-
ABB-IRB140工业机器人技术样本2021-05-17 1341
-
abb工业机器人的编程语言是什么2024-06-16 7779
-
MLCC断裂问题解决方案2024-10-16 2399
全部0条评论

快来发表一下你的评论吧 !
