

Linux内核源码中mutex与spinlock的区别
编程语言及工具
描述
1 定义
互斥锁(英语:Mutual exclusion,缩写 Mutex)是一种用于多线程编程中,防止两条线程同时对同一公共资源(比如全域变量)进行读写的机制。
该目的通过将代码切片成一个一个的临界区域(critical section)达成。临界区域指的是一块对公共资源进行存取的代码,并非一种机制或是算法。一个程序、进程、线程可以拥有多个临界区域,但是并不一定会应用互斥锁。
例如:一段代码(甲)正在分步修改一块数据。这时,另一条线程(乙)由于一些原因被唤醒。如果乙此时去读取甲正在修改的数据,而甲碰巧还没有完成整个修改过程,这个时候这块数据的状态就处在极大的不确定状态中,读取到的数据当然也是有问题的。更严重的情况是乙也往这块地方写数据,这样的一来,后果将变得不可收拾。
因此,多个线程间共享的数据必须被保护。达到这个目的的方法,就是确保同一时间只有一个临界区域处于运行状态,而其他的临界区域,无论是读是写,都必须被挂起并且不能获得运行机会。
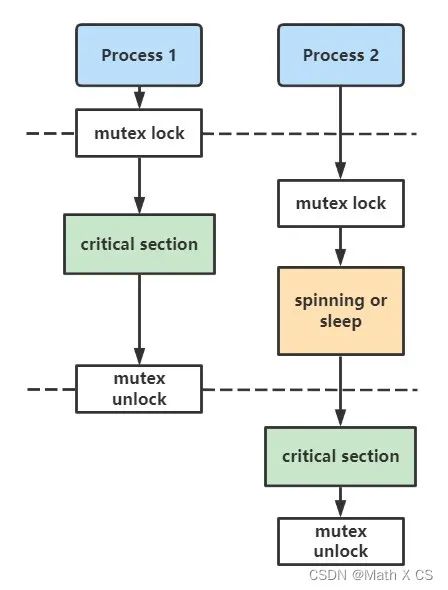
互斥锁实现多线程同步的核心思想是:有线程访问进程空间中的公共资源时,该线程执行“加锁”操作(将资源“锁”起来),阻止其它线程访问。访问完成后,该线程负责完成“解锁”操作,将资源让给其它线程。当有多个线程想访问资源时,谁最先完成“加锁”操作,谁就最先访问资源。
当有多个线程想访问“加锁”状态下的公共资源时,它们只能等待资源“解锁”,所有线程会排成一个等待(阻塞)队列。资源解锁后,操作系统会唤醒等待队列中的所有线程,第一个访问资源的线程会率先将资源“锁”起来,其它线程则继续等待。
mutex有什么缺点?
不同于mutex最初的设计与目的,现在的struct mutex是内核中最大的锁之一,比如在x86-64上,它差不多有32bytes的大小,而struct samaphore是24bytes,rw_semaphore为40bytes,更大的数据结构意味着占用更多的CPU缓存和更多的内存占用。
什么时候应该使用mutex?
除非mutex的严格语义要求不合适或者临界区域阻止锁的共享,否则相较于其他锁原语来说更倾向于使用mutex
mutex与spinlock的区别?
spinlock是让一个尝试获取它的线程在一个循环中等待的锁,线程在等待时会一直查看锁的状态。而mutex是一个可以让多个进程轮流分享相同资源的机制
spinlock通常短时间持有,mutex可以长时间持有
spinlock任务在等待锁释放时不可以睡眠,mutex可以
看到一个非常有意思的解释:
spinlock就像是坐在车后座的熊孩子,一直问”到了吗?到了吗?到了吗?…“
mutex就像一个司机返回的信号,说”我们到了!“
2 实现
看一下Linux kernel-5.8是如何实现mutex的
struct mutex {
atomic_long_t owner;
spinlock_t wait_lock;
#ifdef CONFIG_MUTEX_SPIN_ON_OWNER
struct optimistic_spin_queue osq; /* Spinner MCS lock */
#endif
struct list_head wait_list;
#ifdef CONFIG_DEBUG_MUTEXES
void *magic;
#endif
#ifdef CONFIG_DEBUG_LOCK_ALLOC
struct lockdep_map dep_map;
#endif
};
可以看到,mutex使用了原子变量owner来追踪锁的状态,owner实际上是指向当前mutex锁拥有者的struct task_struct *指针,所以当锁没有被持有时,owner为NULL。
/*
* This is the control structure for tasks blocked on mutex,
* which resides on the blocked task's kernel stack:
* 表示等待队列wait_list中进程的结构体
*/
struct mutex_waiter {
struct list_head list;
struct task_struct *task;
struct ww_acquire_ctx *ww_ctx;
#ifdef CONFIG_DEBUG_MUTEXES
void *magic;
#endif
};
上锁
当要获取mutex时,通常有三种路径方式
fastpath:通过 cmpxchg() 当前任务与所有者来尝试原子性的获取锁。这仅适用于无竞争的情况(cmpxchg() 检查 0UL,因此上面的所有 3 个状态位都必须为 0)。如果锁被争用,它会转到下一个可能的路径。
midpath:又名乐观旋转(optimistic spinning)—在锁的持有者正在运行并且没有其他具有更高优先级(need_resched)的任务准备运行时,通过旋转来获取锁。理由是如果锁的所有者正在运行,它很可能很快就会释放锁。mutex spinner使用 MCS 锁排队,因此只有一个spinner可以竞争mutex。
MCS 锁(由 Mellor-Crummey 和 Scott 提出)是一个简单的自旋锁,具有公平的理想属性,每个 cpu 都试图获取在本地变量上旋转的锁,排队采用的是链表实现的FIFO。它避免了常见的test-and-set自旋锁实现引起的昂贵的cacheline bouncing。类似MCS的锁是专门为睡眠锁的乐观旋转而量身定制的(毕竟如果只是短暂的自旋比休眠效率要高)。
自定义 MCS 锁的一个重要特性是它具有额外的属性,即当spinner需要重新调度时,它们能够直接退出 MCS 自旋锁队列。这有助于避免需要重新调度的 MCS spinner持续在mutex持有者上自旋,而仅需直接进入慢速路径获取MCS锁。
slowpath:最后的手段,如果仍然无法获得锁,则将任务添加到等待队列并休眠,直到被解锁路径唤醒。在正常情况下它阻塞为 TASK_UNINTERRUPTIBLE。
虽然正式的内核互斥锁是可休眠的锁,但midpath路径 (ii) 使它们更实际地成为混合类型。通过简单地不中断任务并忙于等待几个周期而不是立即休眠,此锁的性能已被视为显着改善了许多工作负载。请注意,此技术也用于 rw 信号量。
具体代码调用链很长…
/*不可中断的获取锁*/
void __sched mutex_lock(struct mutex *lock)
{
might_sleep();
/*fastpath*/
if (!__mutex_trylock_fast(lock))
/*midpath and slowpath*/
__mutex_lock_slowpath(lock);
}
__mutex_trylock_fast(lock) -> atomic_long_try_cmpxchg_acquire(&lock->owner, &zero, curr) -> atomic64_try_cmpxchg_acquire(v, (s64 *)old, new);
__mutex_lock_slowpath(lock)->__mutex_lock(lock, TASK_UNINTERRUPTIBLE, 0, NULL, _RET_IP_) -> __mutex_lock_common(lock, state, subclass, nest_lock, ip, NULL, false)
/*可中断的获取锁*/
int mutex_lock_interruptible(struct mutex *lock);
尝试上锁
int __sched mutex_trylock(struct mutex *lock)
{
bool locked;
#ifdef CONFIG_DEBUG_MUTEXES
DEBUG_LOCKS_WARN_ON(lock->magic != lock);
#endif
locked = __mutex_trylock(lock);
if (locked)
mutex_acquire(&lock->dep_map, 0, 1, _RET_IP_);
return locked;
}
static inline bool __mutex_trylock(struct mutex *lock)
{
return !__mutex_trylock_or_owner(lock);
}
释放锁
void __sched mutex_unlock(struct mutex *lock)
{
#ifndef CONFIG_DEBUG_LOCK_ALLOC
if (__mutex_unlock_fast(lock))
return;
#endif
__mutex_unlock_slowpath(lock, _RET_IP_);
}
跟加锁对称,也有fastpath, midpath, slowpath三条路径。
判断锁状态
bool mutex_is_locked(struct mutex *lock)
{
return __mutex_owner(lock) != NULL;
}
很显而易见,mutex持有者不为NULL即表示锁定状态。
3 实际案例
实验:
#include#include #define LOOP 1000000 int cnt = 0; int cs1 = 0, cs2 = 0; void* task(void* args) { while(1) { if(cnt >= LOOP) { break; } cnt++; if((int)args == 1) cs1 ++; else cs2++; } return NULL; } int main() { pthread_t tid1; pthread_t tid2; /* create the thread */ pthread_create(&tid1, NULL, task, (void*)1); pthread_create(&tid2, NULL, task, (void*)2); /* wait for thread to exit */ pthread_join(tid1, NULL); pthread_join(tid2, NULL); printf("cnt = %d cs1=%d cs2=%d total=%d ", cnt,cs1,cs2,cs1+cs2); return 0; }
输出:
cnt = 1000000 cs1=958560 cs2=1520226 total=2478786
正确结果不应该是1000000吗?为什么会出错呢,我们可以从汇编角度来分析一下。
$> g++ -E test.c -o test.i
$> g++ -S test.i -o test.s
$> vim test.s
.file"test.c"
.globl_cnt
.bss
.align 4
_cnt:
.space 4
.text
.globl__Z5task1Pv
.def__Z5task1Pv;.scl2;.type32;.endef
__Z5task1Pv:
...
我们可以看到一个简单的cnt++,对应
movl_cnt, %eax addl$1, %eax movl%eax, _cnt
CPU先将cnt的值读到寄存器eax中,然后将[eax] + 1,最后将eax的值返回到cnt中,这些操作不是原子性质(atomic)的,这就导致cnt被多个线程操作时,+1过程会被打断。
加入mutex保护临界资源
#include#include #define LOOP 1000000 pthread_mutex_t mutex; int cnt = 0; int cs1 = 0, cs2 = 0; void* task(void* args) { while(1) { pthread_mutex_lock(&mutex); if(cnt >= LOOP) { pthread_mutex_unlock(&mutex); break; } cnt++; pthread_mutex_unlock(&mutex); if((int)args == 1) cs1 ++; else cs2++; } return NULL; } int main() { pthread_mutex_init(&mutex , NULL); pthread_t tid1; pthread_t tid2; /* create the thread */ pthread_create(&tid1, NULL, task, (void*)1); pthread_create(&tid2, NULL, task, (void*)2); /* wait for thread to exit */ pthread_join(tid1, NULL); pthread_join(tid2, NULL); printf("cnt = %d cs1=%d cs2=%d total=%d ", cnt,cs1,cs2,cs1+cs2); return 0; } 输出: cnt = 1000000 cs1=517007 cs2=482993 total=1000000 结果正确
-
一文详解Linux内核源码组织结构2022-05-10 7033
-
详解linux内核中的mutex同步机制2022-05-13 8101
-
Linux内核同步机制mutex详解2023-06-26 2073
-
【「Linux 设备驱动开发(第 2 版)」阅读体验】Linux内核开发基础2026-01-12 552
-
Linux内核源码之我见——内核源码的分析方法2020-05-11 3517
-
Linux内核源码目录结构2020-12-30 1861
-
Linux内核drivers_char_awchip中无源码,导致内核编译错误怎么解决?2022-01-05 1302
-
Linux的Spinlock在MIPS多核处理器中的设计与实2009-12-04 836
-
linux内核rcu机制详解2017-11-13 9477
-
需要掌握的Linux内核源码分析方法2019-04-28 1354
-
Linux内核之同步2019-04-02 494
-
Linux内核和Windows内核有什么区别?2021-03-03 3268
-
STM32MP157 Linux系统移植开发篇8:Linux内核配置方法及编译2021-12-04 1172
-
AOSP Android11系统源码和内核源码简析2023-01-29 7793
-
获取Linux内核源码的方法2023-12-13 2385
全部0条评论

快来发表一下你的评论吧 !
