

 无刷电机常用的位置检测方法
无刷电机常用的位置检测方法
工业控制
描述
上一篇文章我们讲了一些无刷电机的基础知识,包括无刷电机的内部结构,驱动原理等,我们知道了只需要按照转子的当前位置,来按顺序给定子线圈通电,就能让电机转动起来。
但是,上一篇中我们跳过了一个关键步骤,就是如何检测转子的位置。本篇我们就讲讲常用的位置检测方法,以及引出的一些相关问题。
1)霍尔传感器检测位置驱动
我们知道,获取磁铁的位置可以用霍尔传感器,无刷电机的转子就是永磁体,因此只要在合适的位置安装霍尔传感器,就能知道转子的旋转位置。
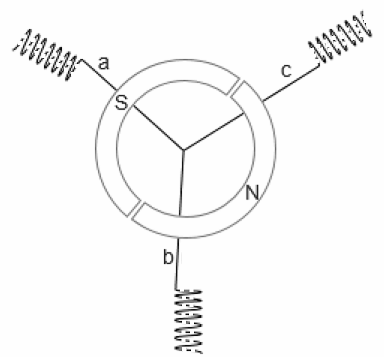
在无刷电机中,一般用3个开关型霍尔器件就能检测转子的位置。霍尔的安装位置可以相隔120°,也可以相隔60°,我们以下图3N2P型电机,霍尔相隔120°的安装方式为例:
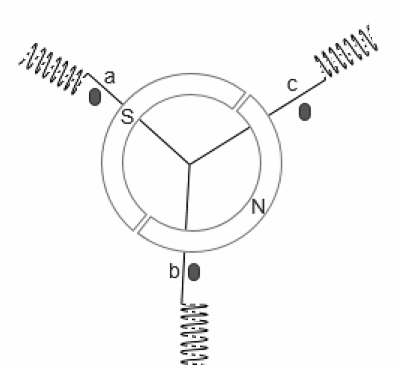
a、b、c是三个霍尔传感器。当N极接近霍尔a时,a输出高电平1;当N远离a时,a输出低电平。同理b、c也是一样的特性。
因为2P的转子是一对极,所以在转子逆时针转动一周时,a、b、c霍尔的输出波形就都会高低电平变化一次,如下图所示:
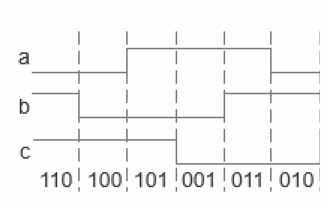
例如,下图中,转子当前的位置会使得霍尔输出cba = 110:
这样我们通过霍尔传感器的输出,可以确定转子的当前位置,再结合上一篇讲的方法,就可以使它转动起来了。
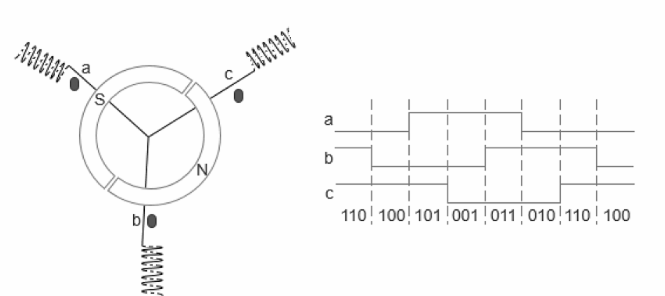
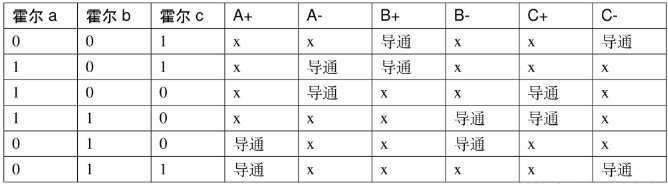
如果我们想使用“二二导通”的方法让它逆时针转动,在图中位置cba = 110,则应该使得B线圈加正电压C线圈加负电压A悬空;这个加电状态保持到N极转到接近c位置时,霍尔输出会自动变为cba = 100,则我们的加电状态应该变为A线圈加正电压C线圈加负电压B线圈悬空,才能让转子继续逆时针转动。
不难发现,三个霍尔的输出在一个周期内是6个状态,正好对应了“二二导通”法电机转动一圈时对线圈通电的6个状态。
于是,我们只需要用abc三个霍尔的输出来控制ABC三个线圈的加电状态,就能控制电机连续地转动起来了。
具体来说,逆时针转动时,如下切换:
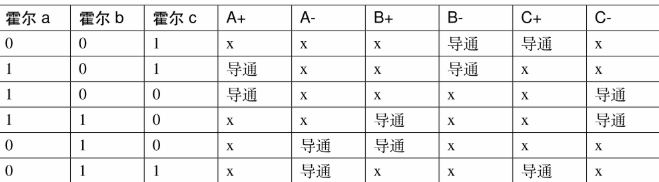
顺时针转动时,如下切换:
至此,有霍尔感的无刷电机驱动,就可以用上述方法驱动起来了。
关于有传感器的位置检测,还有许多其他方法,如编码器、光电传感器、旋转变压器等等。后续小白白会专门写一篇文章讲解。
2)无传感器(检测反电动势)驱动
在一些微、小电机系统中,安装位置传感器对电机的体积和成本会有不利影响,因此,无传感器的位置检测技术也非常有实用价值。我们先来讲解它的原理,再聊聊它的优缺点。
我们以下面这张图为例:
对比一下上节中有传感器的驱动方式,在这个位置,是B线圈加正电压C线圈加负电压A线圈悬空。
电机的转子磁铁在转动时,显然在A线圈上会有产生一个感应电动势。假如当转子磁铁转动时,S极先接近线圈A,然后从另一边远离线圈A,在线圈A中产生的感应电动势就会有一个由正变为负的过程(或者由负变正),也即是感应电动势会有一个过零点。(注意一下,这里的感应电动势过零点,是以三个线圈的中心连接点为参考点的)。
所以,我们可以在电机转动时,检测不加电的那一相的感应电动势得过零点,就能知道转子的位置了。
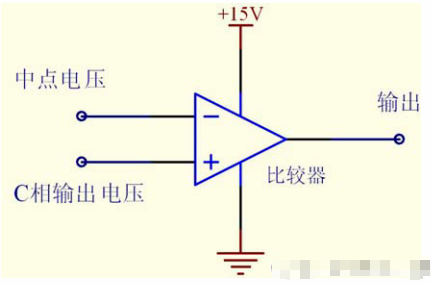
检测过零点的方法有很多种,可以用比较器,如下图的电路,是检测其中一相的示例:
注意图中的中点电压,一般无刷电机是不会把中点引出来的,要通过其他方式获取,可以用三相线串电阻后连到一起得到。下图是一种经典的获取中心点电压的方法,左边是三相线上取的电压,右边输出是中心点和三相过零的检测点:
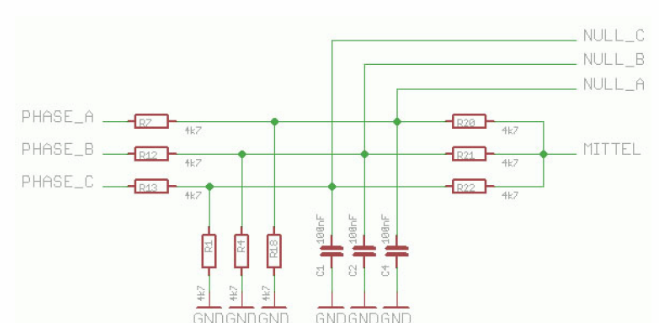
上图中的电阻值可以依据供电调整,主要是分压用的。
另外,电机转动起来时、以及用PWM控制时,都会产生很多干扰,在过零比较时需要加入滤波电路,上图中的电容就是一种简单的滤波方法,但是要注意,加电容滤波以后会造成电压的相位滞后,所以电容值不能过大。如果是通过软件采集后再判断过零点,也可以通过软件来滤波。
检测到转子的位置,就可以据此进行换向了,最佳换向位置是在过零点之后30°。那么如何知道转过30°需要多长时间呢?
通常的方法,是近似认为转子的转速是均匀的,从上一次换相到本次过零的时间,就约等于本次过零到下次换相的时间。由此,我们只需要用单片机进行计时,就可以知道近似的30°的换向位置。
另一种更加简单直接的方法,是在检测到过零点后,立即进行换向,这种方法换向位置不是最佳的,会损失一些效率,但是设计起来最简单。
至此,无传感器的位置检测和驱动方法,我们已经基本了解了。
但是,此时又出现了一个新问题,在初始启动、转子还没有转动时,磁铁和线圈没有相对运动,线圈里是没有感应电动势产生的,那该怎样确定转子的位置呢?我们看下一节,无传感器电机的启动问题。
3)无传感器的电机启动问题
由于无传感器的模式,需要靠感应电动势来判断转子的位置,所以电机刚开始启动时,或者转速很低时,感应电动势很小,是无法用来检测位置的。所以无传感器的无刷电机的启动是个难点问题。
一般的方法是采用三段法启动,即先预定位,再启动加速,最后进入闭环控制。具体的实现方法如下:
a)预定位
就是先给某两相通电一小会儿,让转子转到预定的位置;这个通电时间、占空比需要依据不同的电机和负载情况确定;否则可能会由于长时间在一个线圈上加电烧坏,或者时间太短不能预定位。
b)启动加速
就是依据所要转动的方向,依次给各相加电(换相);启动的过程,需要多次换相,并逐渐加速;同样的,这个加速过程也与具体的电机和负载相关,需要测试来确定,换相频率太低,电机加速慢,线圈也会发热严重;换相频率太高,电机运行起来容易失步,导致加速失败。
常见的加速有三种方式:恒频升压法、恒压升频法、升频升压法,字面意思就可以理解,就不多解释了;如某些航模电调,加速时,每次延时时间比上一次减少1/25,直到电机完全转起来。
c)闭环控制
当启动加速到一定转速时,反电动势及其过零点可以被稳定的检测到时,就可以切换到闭环控制状态,也就是按上一节的控制逻辑进行换相驱动了。
由无感驱动的方法可以看出,它的启动是比较复杂的,在低速运转时感应电动势较小时也运行困难,所以无感无刷电机不合适用在频繁启停、低速运转的场合,而比较适合用于体积、成本受限、运行速度比较高的场合。
4)无刷电机的速度控制
通过上述讲解,我们知道了,无论是有感还是无感无刷电机,在转动时,是靠转子的位置去确定下一时刻的通电状态,而转到下一个位置的时间只与供电电压相关,所以,无刷电机调速时,最简单得方法是调整供电电压,或者使用PWM控制。
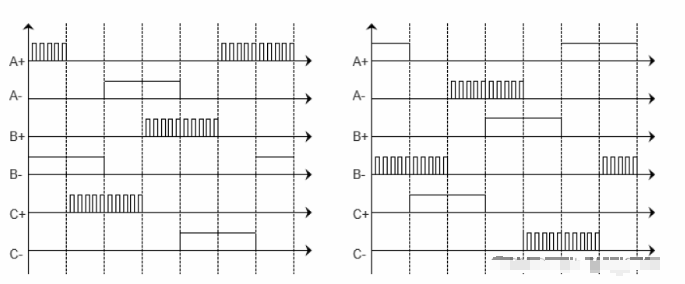
使用PWM控制时,常用的方法是在导通区间内,上下桥臂其中之一恒通、另一半用PWM控制,如下图所示,左图是下桥臂恒通上桥臂PWM控制的方式,右图是上桥臂恒通下桥臂PWM控制的方式:
好了,到这里无刷电机的相关基础知识就已经讲完了。
-
无位置传感器直流无刷电机软件起动2025-08-04 482
-
无刷电机小波神经网络转子位置检测方法的研究2025-06-25 292
-
stm32的foc是怎么检测到无感无刷电机的转子的位置的?2024-04-28 1133
-
三相全波无刷电机位置检测介绍2024-02-05 4365
-
无刷电机常用的位置检测方法2023-04-21 7814
-
无刷电机控制基础之有感和无感驱动、调速2023-03-20 782
-
三相全波无刷电机的位置检测2023-02-24 3382
-
无刷电机的位置检测器主要分为哪几种?求解2021-07-26 1619
-
【好文分享】基于电感法无刷电机转子初始位置的辨识2021-05-06 7288
-
无感直流无刷电机的转子位置检测分析2020-04-22 8543
-
无刷电机故障原因及处理方法_无刷电机维修2020-03-17 55675
-
霍尔无刷电机中位置检测中断实现2019-11-14 7019
-
无霍尔直流无刷电机转子位置信号如何检测?2019-04-28 14012
全部0条评论

快来发表一下你的评论吧 !
