

步进电机驱动相关的知识
工业控制
描述
之前小白白写过一篇步进电机驱动基础,讲了最基本的步进电机驱动方法。
这里,接着以前的文章,再讲一些步进电机驱动相关的知识,主要包括步进电机的细分驱动、加减速控制等内容。
1)步进电机的细分驱动
我们先来讲解什么是细分驱动,以两相的双极性电机为例子,它的基本结构如下图:
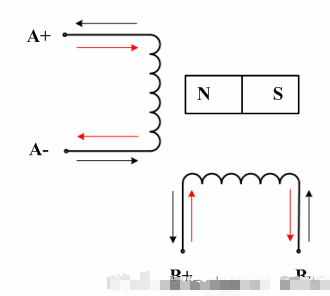
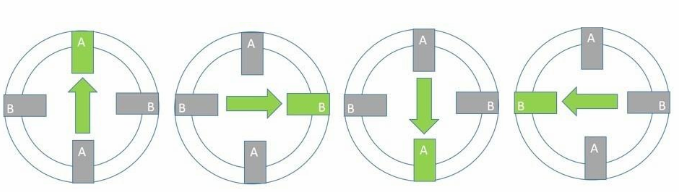
最基本的驱动方式是依次执行:A相通正电流,B相通正电流,A相通负电流,B相通负电流。这样周而复始,每执行一步,转子转动一个步距,类似于以前讲的单4拍法驱动。
如下图所示:
当我们想让它转动更加平稳时,可以使用类似单双8拍法的驱动方式,依次执行:A通正电流,A和B都通正电流,B通正电流,B通正电流A通负电流,A通负电流,A和B都通负电流、B通负电流、A通正电流B通负电流。
如下图所示:
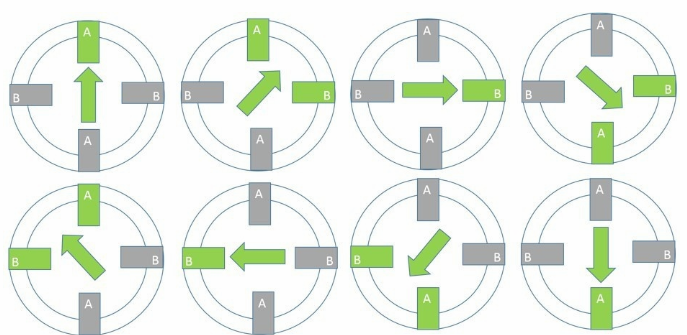
这里通过A、B同时通电使得转子可以处在A、B中间的一个位置,使得原本一步走到的步距,变成了两步走到,这样可以使得步进电机运行更加平稳。
上述把四步变成八步的驱动方法,就是最简单的一种细分驱动。实际上,步进电机的细分驱动,就是在转子在转动一个步距的过程中,逐渐改变A、B相的电流(如A相逐渐变小、而B相逐渐变大),使得转子可以平稳运动的驱动方法。
上面讲的驱动方法,在一个步距中分成了两步执行,所以称为2步细分;类似地,一个步距分为4步执行时称为4步细分。理想情况下如果无限细分下去,A、B相的电流就会变成正弦波。
如下图所示:
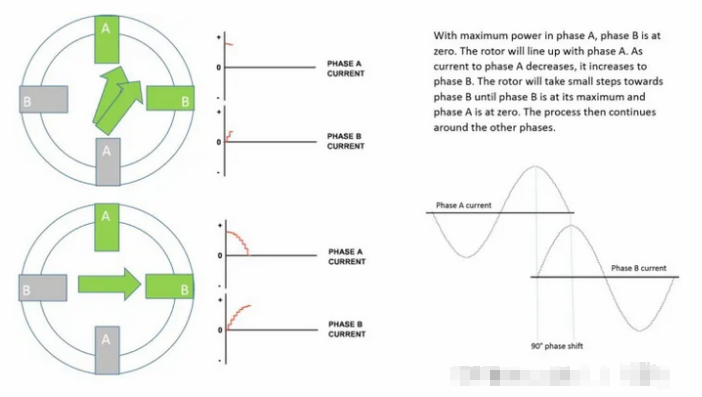
使用细分驱动方式时,步进电机的运行更加平稳,并且可以使得实际可控的步距角更小了,有了更高的控制精度。
实际应用中,实现细分一般都是由集成驱动芯片来完成的,如常见的A4988可以实现16步细分、RV8825芯片可以实现32步细分,TMC2209可以实现256细分。
另,网上可以买到的集成步进电器驱动器,也带由细分功能:

如果设计时体积比较宽松,可以考虑选择成品的步进电机驱动器,这样会简单很多。
2)步进电机的加、减速控制
在步进电机启动时,由于转子的速度是从零往上增加的,而步进电机的转速和驱动脉冲频率相关,所以在启动时,为了避免失步,通常会先给低频率的脉冲驱动,之后逐渐增加,直到到达预定的转速。
步进电机减速时,与加速过程类似,转子也是不能瞬间停止的,需要逐渐减小驱动脉冲频率,直到减到预定转速。
常用的加、减速控制方法有梯形曲线和S形曲线,也就是按梯形或S形曲线去加/减驱动脉冲的频率。
梯形曲线的示例如下图,就是在控制加速时,转速均匀增加,而减速时,转速均匀减小:
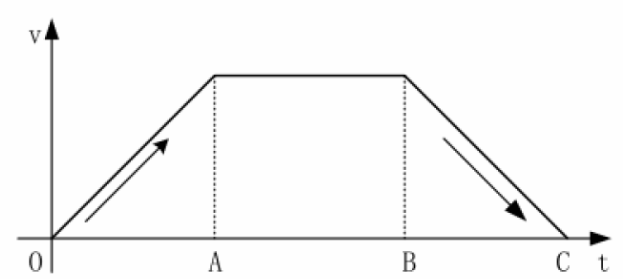
梯形曲线在加减速时,加速度是不变的,但是由于电磁转矩与转速是非线性关系,所以转速增加时转矩会下降,有是有可能产生转矩不足而失步的。使用更加平滑的S形曲线进行加减速控制,可以改善这一状态。
一种S形曲线的加速实现方式示例如下图,采用两段加速度恒定的方式实现,第一段加速度均匀增加,第二段加速度均匀减小,直到加速度为0,停止加速。
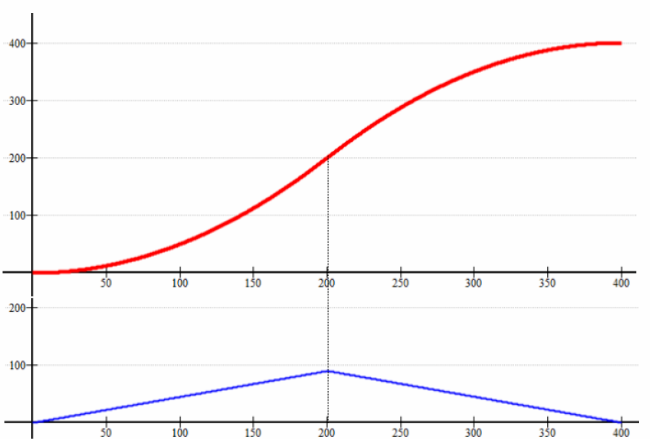
S曲线的减速也可以看作加速的逆过程,处理方法类似。S形曲线可以看作梯形曲线的改进,它在开始加速和停止加速的过渡区更加平滑。
这里要注意一下,S形曲线可以有多种实现方式,上面的例子只是一种方式,也可以由指数函数实现、正弦函数实现,需要依据实际情况选用合适的实现方式。
-
arduino如何驱动步进电机2024-01-14 5980
-
一文了解步进电机的相关知识2023-08-17 1523
-
拓尔微技术干货 | 细分驱动技术介绍,内含5个知识点2023-06-27 4448
-
步进电机的相关知识:相、线、极性和步进方式2023-03-24 1283
-
步进电机按步驱动2023-03-22 982
-
步进电机的细分驱动及加减速控制2023-03-20 1151
-
步进电机的基础知识2023-03-07 5612
-
有关步进电机转速的相关问题2021-09-22 5516
-
从步进电机驱动IC的角度看步进电机2021-08-31 1769
-
步进电机基础(5.1)-步进电机的驱动与控制-恒压驱动、恒流驱动 相关资料推荐2021-07-08 1809
-
全方位讲解步进电机及驱动器原理知识2015-11-24 1309
-
步进电机驱动器基础知识2010-01-09 3829
全部0条评论

快来发表一下你的评论吧 !
