

【地平线旭日X3派试用体验】地平线旭日X3派AGV智能车设计
描述
本文来源电子发烧友社区,作者:mameng, 帖子地址:https://bbs.elecfans.com/jishu_2305070_1_1.html
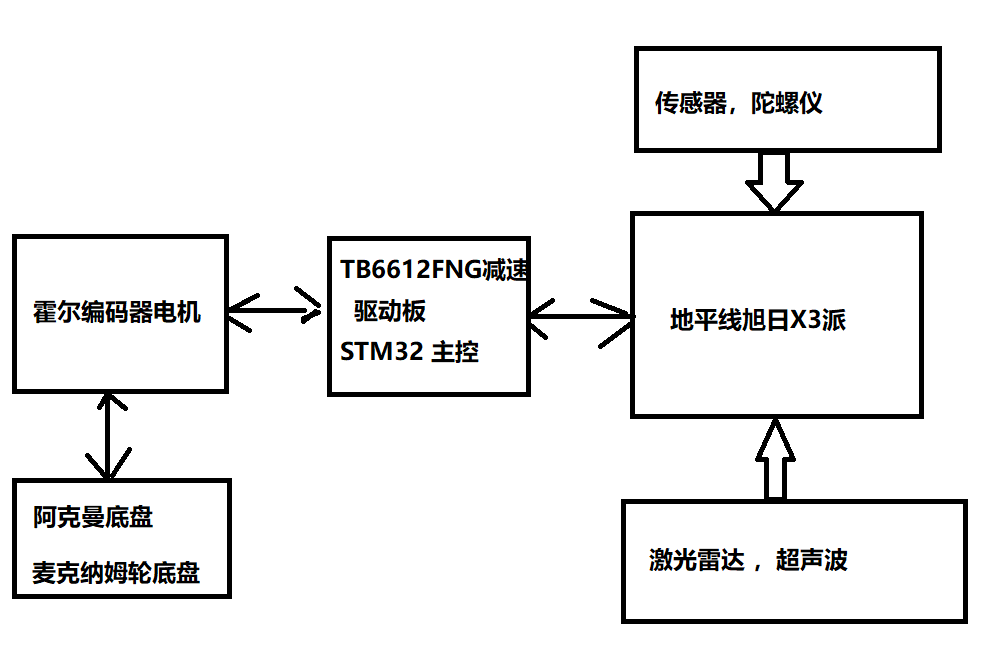
本项目是做一个基于地平线旭日X3派ROS-SLAM激光雷达自主导航AGV机器人原型设计。
地平线旭日X3派ROS主机、副控板及驱动、控制端,通过xrbase节点调用xrmiddleware中间件API,与副控板进行通信,实现陀螺仪数据获取、里程计数据获取、电压信息获取,电机驱动等。
ROS 系统介绍
ROS是面向机器人的开源的元操作系统(meta-operatingsystem),它能够提供类似传统操作系统的诸多功能,如硬件抽象、 底层设备控制、 常用功能实现、 进程间消息传递和程序包管理等。此外,它还提供相关工具和库,用于获取、编译、编辑代码以及在多个计算机之间运行程序完成分布式计算。ROS奠定在一个指导原则上一“ 不重复发明车轮"。、任何人都可以轻易地且不需要花-分钱就能分享自己的ROS代码成果。搭乘ROS这趟列车最精彩、最令人兴奋的部分或许就在于可以和来自全世界数以千计的志同道合者们一同研究机器人。
1,系统结构:
2 官方地平线旭日X3开发者资源:
https://developer.horizon.ai/resource
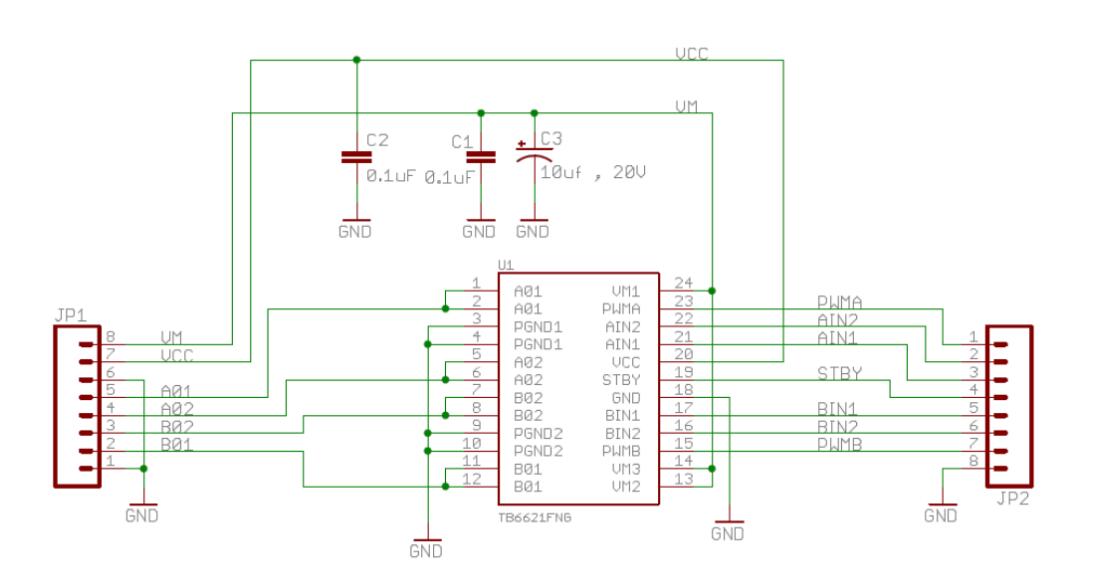
2.1 电及驱动芯片介绍:TB6612
TB6612FNG可以驱动两个电机,TB6612FNG 模块相对于传统的 L298N 效率上提高很多,体积上也大幅度减少,在额定范围内,芯片基本不发热。PWM控制的频率可达100kHZ。
TB6612FNG模块的原理图
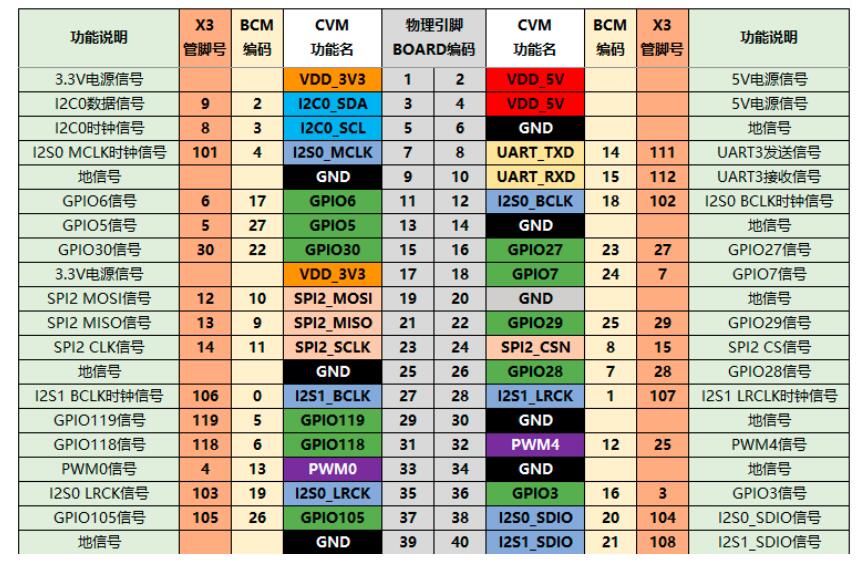
2.2 旭日X3开发板GPIO资源,各种总线和GPIO供开发者使用。旭日x3派本身有两个PWM脉冲信号端口(32、33),目前想直接驱动TB6612。如果电流太小,就需要借助STM32驱动TB6612,旭日派的给STM32 MCU发送指令,通过串口(旭日派UART3的14、15端口)发送指令。
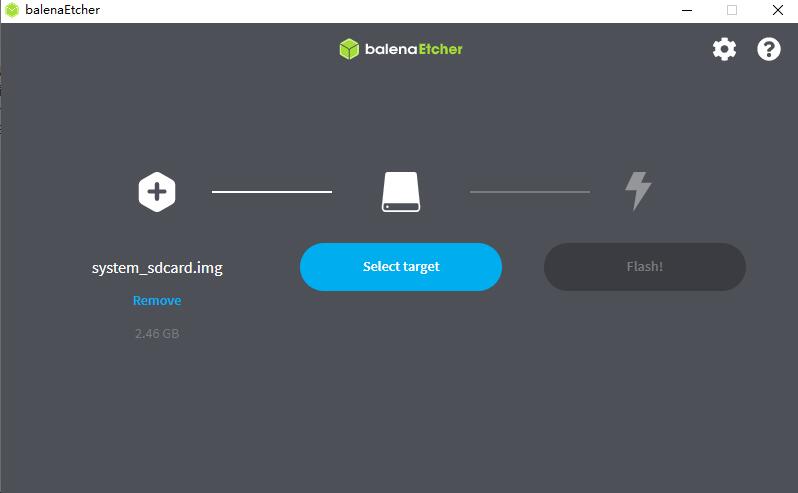
开发首先烧录镜像首先通过:使用balenaEtcher烧写镜像。
2.3 打开MobaXterm工具,点击Session,然后选择Serial
配置端口号,例如COM3,具体使用哪个串口号以PC识别到的串口号为准,然后设置波特率为921600等参数。旭日X3派的串口配置参数如下:
波特率(Baud rate):921600
数据位(Data bits):8
奇偶校验(Parity):None
停止位(Stop bits):1
流控(Flow Control):无
点击OK,输入用户名(root)、密码(root)即可完成登录。
可通过串口登录、SSH登录方式登录开发板,登录用户名:sunrise 密码:sunrise
测试代码 ,可以修改simple_pwm.py,程序功能为固定占空比百分之30%、频率50khz输出pwm信号
2.4 官方已经发布wingpi GPIO库,
持续测评...
Python API开发
虚拟机ROS开发
打开APP阅读更多精彩内容
本项目是做一个基于地平线旭日X3派ROS-SLAM激光雷达自主导航AGV机器人原型设计。
地平线旭日X3派ROS主机、副控板及驱动、控制端,通过xrbase节点调用xrmiddleware中间件API,与副控板进行通信,实现陀螺仪数据获取、里程计数据获取、电压信息获取,电机驱动等。
ROS 系统介绍
ROS是面向机器人的开源的元操作系统(meta-operatingsystem),它能够提供类似传统操作系统的诸多功能,如硬件抽象、 底层设备控制、 常用功能实现、 进程间消息传递和程序包管理等。此外,它还提供相关工具和库,用于获取、编译、编辑代码以及在多个计算机之间运行程序完成分布式计算。ROS奠定在一个指导原则上一“ 不重复发明车轮"。、任何人都可以轻易地且不需要花-分钱就能分享自己的ROS代码成果。搭乘ROS这趟列车最精彩、最令人兴奋的部分或许就在于可以和来自全世界数以千计的志同道合者们一同研究机器人。
1,系统结构:
2 官方地平线旭日X3开发者资源:
https://developer.horizon.ai/resource
2.1 电及驱动芯片介绍:TB6612
TB6612FNG可以驱动两个电机,TB6612FNG 模块相对于传统的 L298N 效率上提高很多,体积上也大幅度减少,在额定范围内,芯片基本不发热。PWM控制的频率可达100kHZ。
TB6612FNG模块的原理图
2.2 旭日X3开发板GPIO资源,各种总线和GPIO供开发者使用。旭日x3派本身有两个PWM脉冲信号端口(32、33),目前想直接驱动TB6612。如果电流太小,就需要借助STM32驱动TB6612,旭日派的给STM32 MCU发送指令,通过串口(旭日派UART3的14、15端口)发送指令。
开发首先烧录镜像首先通过:使用balenaEtcher烧写镜像。
2.3 打开MobaXterm工具,点击Session,然后选择Serial
配置端口号,例如COM3,具体使用哪个串口号以PC识别到的串口号为准,然后设置波特率为921600等参数。旭日X3派的串口配置参数如下:
波特率(Baud rate):921600
数据位(Data bits):8
奇偶校验(Parity):None
停止位(Stop bits):1
流控(Flow Control):无
点击OK,输入用户名(root)、密码(root)即可完成登录。
可通过串口登录、SSH登录方式登录开发板,登录用户名:sunrise 密码:sunrise
测试代码 ,可以修改simple_pwm.py,程序功能为固定占空比百分之30%、频率50khz输出pwm信号
2.4 官方已经发布wingpi GPIO库,
持续测评...
Python API开发
虚拟机ROS开发
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 开发板试用
-
旭日,从地平线升起——地平线旭日X3派开箱试用2022-11-08 3168
-
【地平线旭日X3派试用体验】X3派开箱及开发环境搭建2022-10-21 2258
-
【 地平线旭日X3派试用体验】地平线旭日X3派AGV智能车设计2022-09-12 5452
-
#旭日X3派首百尝鲜# 用solidworks画了一个旭日X3派的模型2022-08-31 25997
-
#旭日X3派首百尝鲜#旭日x3派移植mjpg-streamer2022-08-10 2418
-
【地平线旭日X3派试用体验】保姆级配置git与使用+C语言编写贪吃蛇2022-08-09 2379
-
【 地平线旭日X3派试用体验】 HHP环境搭建及简单demo演示2022-07-31 6694
-
【地平线旭日X3派试用体验】开箱篇硬件介绍2022-07-26 7347
-
地平线旭日X3派试用-玩转串口通信2022-07-22 2531
-
【地平线旭日X3派试用体验】开箱+快速上手体验2022-07-17 3801
-
【 地平线旭日X3派试用体验】#旭日X3派首百尝鲜#资料下载及环境搭建初试2022-07-12 4280
-
【地平线旭日X3派试用体验】开箱与板载资源介绍视频2022-07-10 5202
全部0条评论

快来发表一下你的评论吧 !
