

机器视觉边缘模式的检测方法介绍
描述
图像边缘是两个具有不同灰度的均匀图像区域的边界,边缘检测是图像处理的基本问题,目的是标识数字图像中亮度变化明显的边缘点,不断向上构成更高层次的特征描述。并且剔除不相关的特征信息,保留图像重要的结构属性。
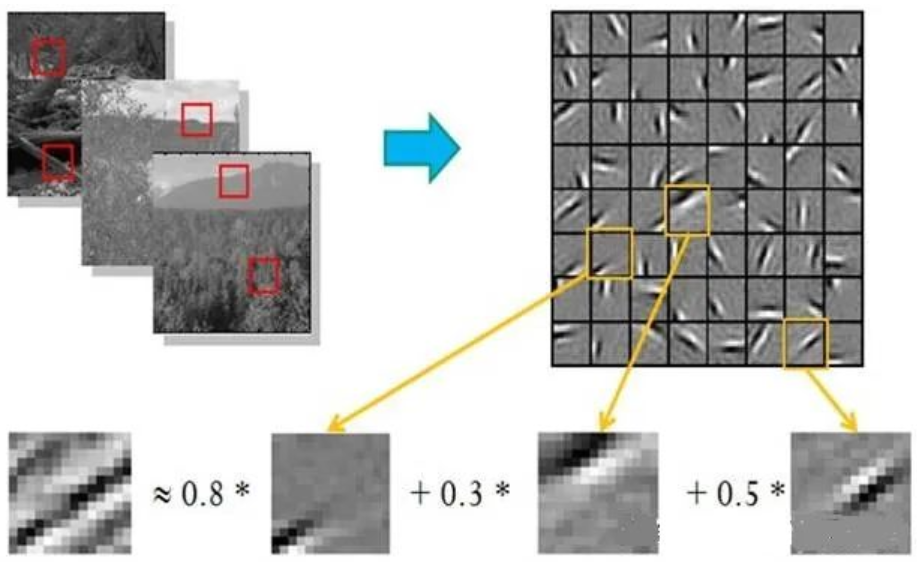
在视觉计算理论框架中,抽取二维图像上的边缘、角点、纹理等基本特征,是整个系统框架中的第一步,图像中局部灰度级以简单的方式作极快变换的小区域特征所组成的图称为基元图,在不同"尺度"意义下的边缘点,在一定条件下包含了原图像的全部信息。
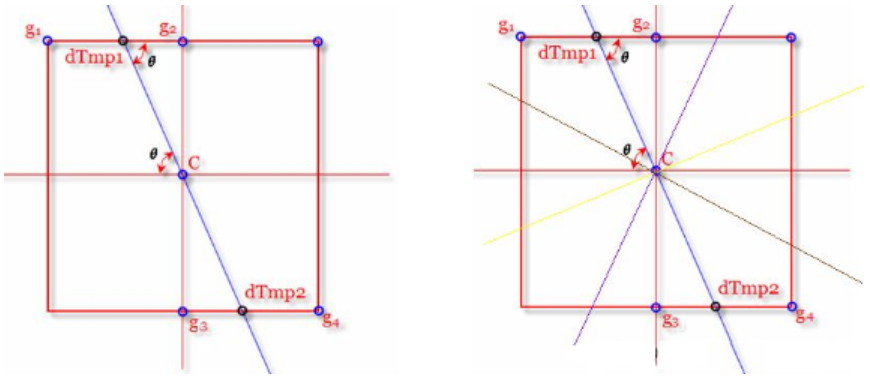
检测原理基本思想是通过检测每个像素和其邻域的状态,以决定该像素是否位于一个物体的边界上。如果一个像素位于一个目标物体的边界上,则其邻域像素的灰度值的变化就比较大,可以通过细微的间距移动狭窄的区段,检测每个点的边缘宽度与边缘位置,确定目标对象的边界。
检测方法
滤波
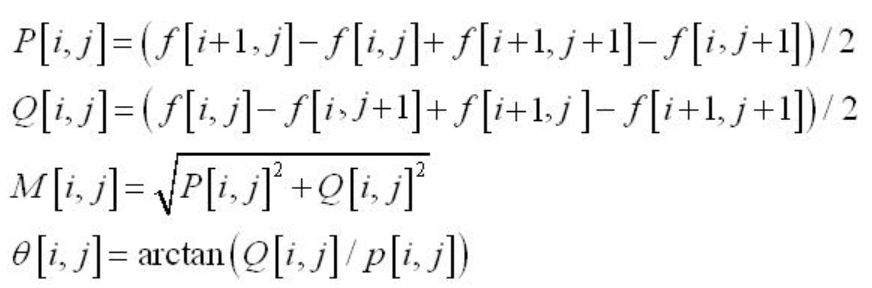
边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数的计算对噪声很敏感,因此使用滤波器来改善与噪声有关的边缘检测器的性能。大多数滤波器在降低噪声的同时也导致了边缘强度的损失,因此,增强边缘和降低噪声之间需要折中。
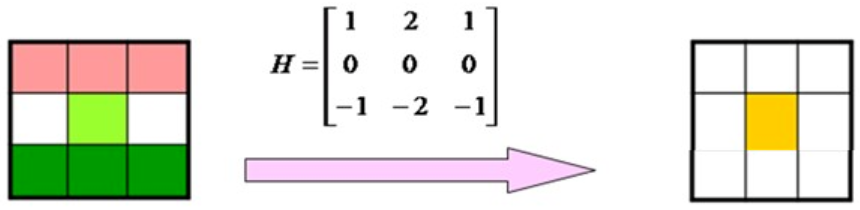
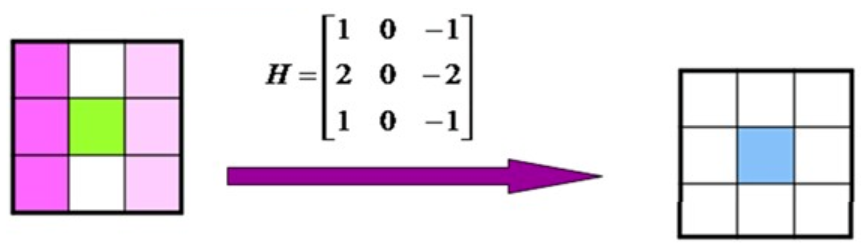
增强边缘增强一般是通过计算梯度幅值来完成,增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将邻域(或局部)强度值有显著变化的点突显出来。
检测
在图像中有许多点的梯度幅值比较大,这些点在特定的应用领域中并不都是目标边缘,所以应该用某种算法来确定哪些点是边缘点。
定位边缘的位置可在子像素分辨率上来估计,边缘的方位也可以被估计出来。大多数场合下,仅仅需要边缘检测器指出边缘出现在图像某一像素点的附近,而没有必要指出边缘的精确位置或方向。
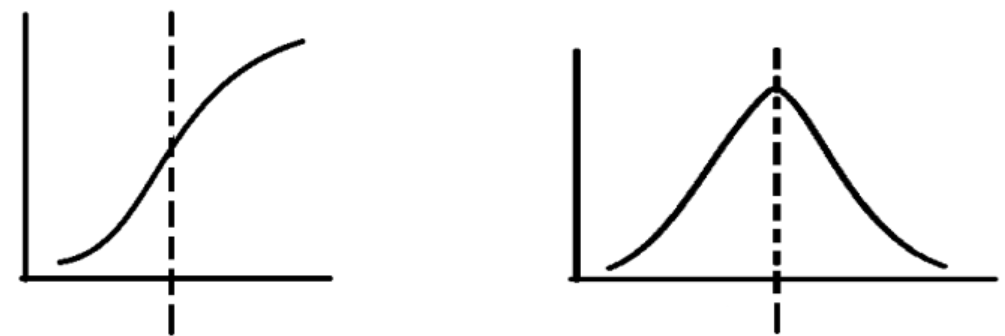
算法应用可以将边缘定义为图像中灰度发生急剧变化的区域边界,图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此我们可以用局部图像微分技术来获得边缘检测算子。而边缘检测的实质是采用某种算法来提取出图像中对象与背景间的交界线。
在图像边缘检测中,抑制噪声和边缘精确定位是无法同时满足的,一些边缘检测算法通过平滑滤波去除噪声的同时,也增加了边缘定位的不确定性。而提高边缘检测算子对边缘的敏感性的同时,也提高了对噪声的敏感性。
如上述所说,一阶算子检测边缘,如Robert,虽然对边缘定位精度较高,但是容易丢失边缘,对噪声无抑制能力。又如Sobel,对噪声仅有一点抑制能力,但无法完全排除虚假边缘。又如二阶拉普拉斯算子,对噪声响应很高。或者改进后的高斯-拉普拉斯算法,虽然经过高斯模糊,但是这些模糊不能完全去除噪声,没处理的好,反而会影响边缘检测的效果。
审核编辑:郭婷
- 相关推荐
- 热点推荐
- 机器视觉
-
#硬声创作季 机器视觉技术与应用:基于微分的边缘检测Mr_haohao 2022-10-26
-
机器视觉 --检测图像边缘小程序2015-08-23 41073
-
机器视觉表面缺陷检测技术2016-01-20 6603
-
机器视觉图像处理之角点检测技术2016-01-22 4429
-
机器视觉算法与应用(双语版)2016-06-29 3929
-
机器视觉检测设备的优势2019-10-14 2786
-
CCD机器视觉检测定位系统在手机壳瑕疵检测的应用介绍2020-08-19 2953
-
中山视觉尺寸检测方法和检测范围2021-07-08 1145
-
四元数数控:深圳CCD机器视觉检测定位系统有什么应用?2021-11-16 715
-
基于机器视觉的LED芯片检测方法2017-02-07 1000
-
基于机器视觉的方块地毯边缘缺陷检测技术2018-02-23 1287
-
基于机器视觉定位技术之产品边缘轮廓检测2021-04-14 2759
-
探究机器视觉定位技术之产品边缘轮廓检测2021-04-19 3017
-
机器视觉学习—边缘检测2023-02-14 2156
-
机器视觉检测平台2023-06-29 1577
全部0条评论

快来发表一下你的评论吧 !
