

STC8A无人机设计实现
描述
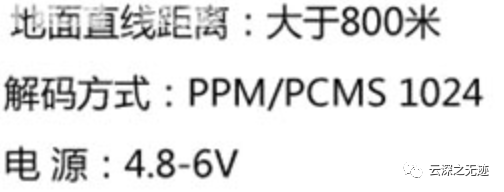
下载时选择内部时钟24MHZ, 设置用户EEPROM大小为2K或以上. MC6B六通道2.4G 100mW.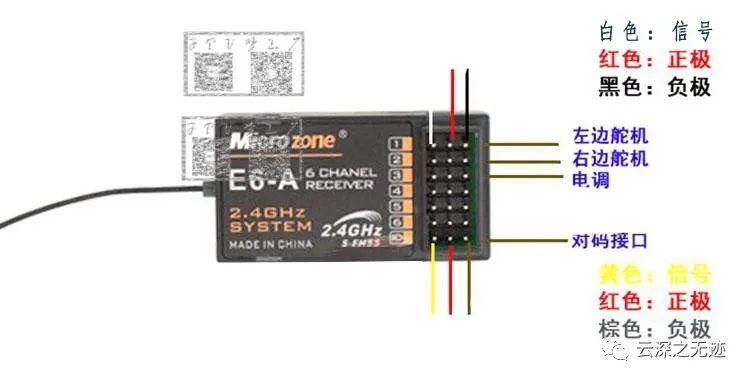
四轴上电待机:上电后,航灯不亮,接收机LED闪烁,此时打开遥控器,将左右油门下拉到最小,接收机收到信号LED常亮. 表示RF通讯已连接。此时蜂鸣器"哔"一声,航灯闪烁,表示待机模式。
四轴启动:将遥控器左右操纵杆掰成下内八,启动四轴,四轴"哔"一声,4个螺旋桨开始低速旋转,航灯常亮。 此后提升油门,就可以加速螺旋桨,直到起飞。
四轴飞行:起飞后,可以操纵右手的俯仰、横滚操纵杆,实现前后左右或任意方向的飞行。左手油门杆左掰是航向逆时针转,右掰是航向顺时钟转。
四轴下降停止:收油门,四轴逐渐下降到地面,然后两操纵杆掰成下外八,停止四轴,重新处于待机模式。
四轴水平校准:将四轴放置于水平地面,处于待机模式,然后两操纵杆掰成上内八,四轴"哔"一声进入校准,完成后"哔哔"两声完成校准。
四轴取消水平校准:将四轴放置于水平地面,处于待机模式,然后两操纵杆掰成上外八,四轴"哔"一声取消校准。取消水平校准或未进行水平校准过的四轴,起飞时即使无风也可能会有明显漂移。
电池低压报警:当电池低压时,蜂鸣器"哔哔"报警,同时航灯闪烁,此时请尽快回航降落。
无遥控信号异常:当四轴在空中突然收不到遥控信号时,四轴蜂鸣器发出"哔哔哔"报警,同时航灯闪烁,四轴保持水平,逐渐自动减小油门降落。
以上这些是要实现的功能:
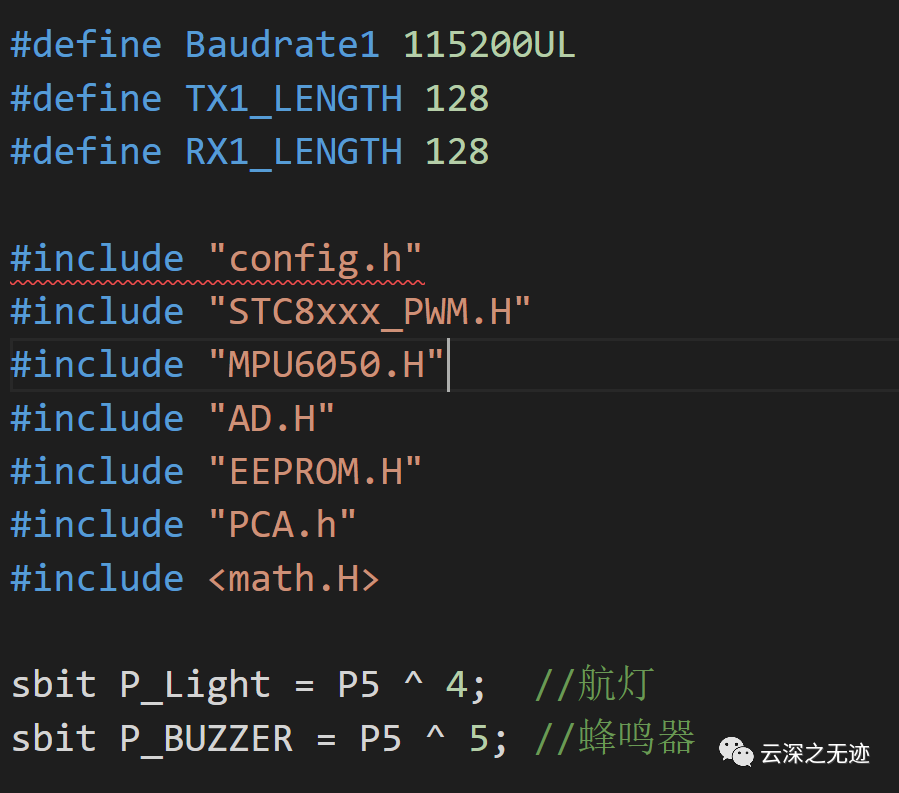
定义串口的波特率,串口的数据包长度,下面昨天看的驱动,最后是IO的定义。
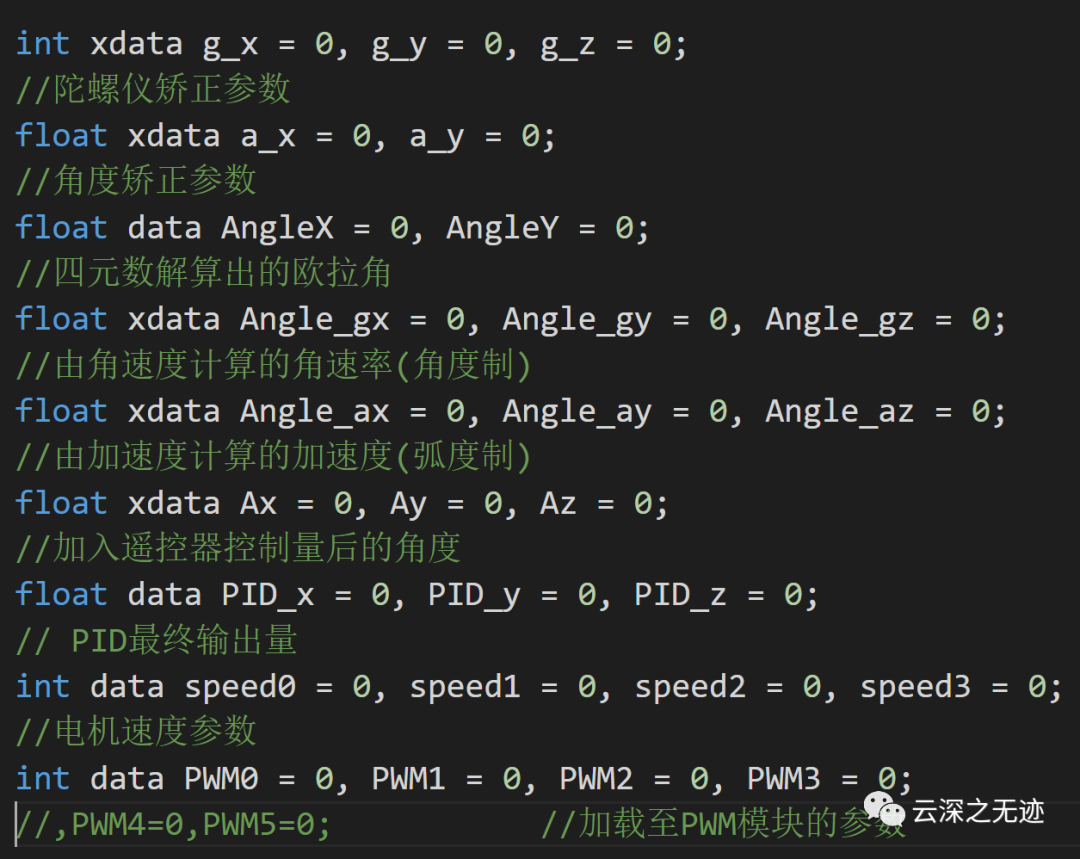
矫正参数就是置0,还有就是一些姿态角的初始定义,欧拉角,角度和加速度。
欧拉角是由三个角组成,这三个角分别是Yaw,Pitch,Roll。
Yaw 表示绕y轴旋转的角度,Pitch表示绕x轴旋转的角度,Roll表示绕z轴旋转的角度。
也就是说,任意的旋转角度都可以通过这三次按照先后顺序旋转得到。
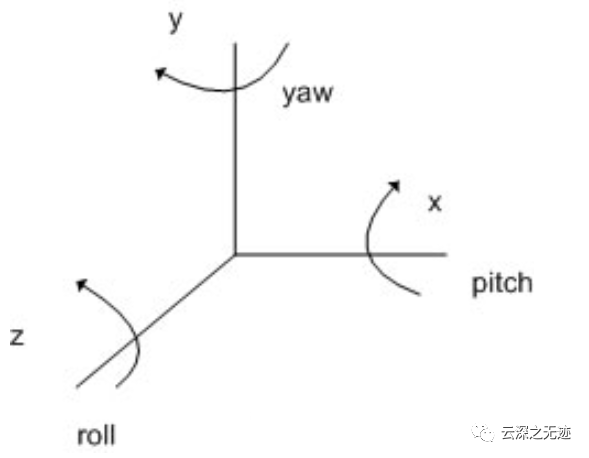
欧拉角的定义

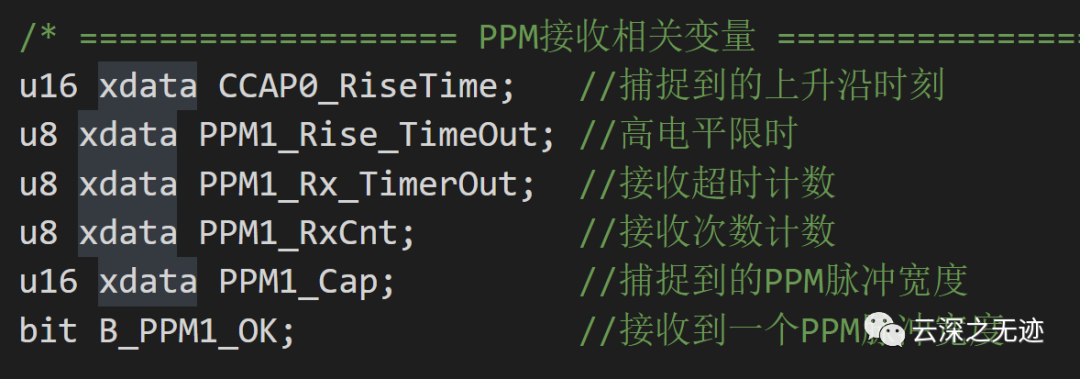
tmp是中间变量,下面是中位的遥控变量

IMU的缓存数组
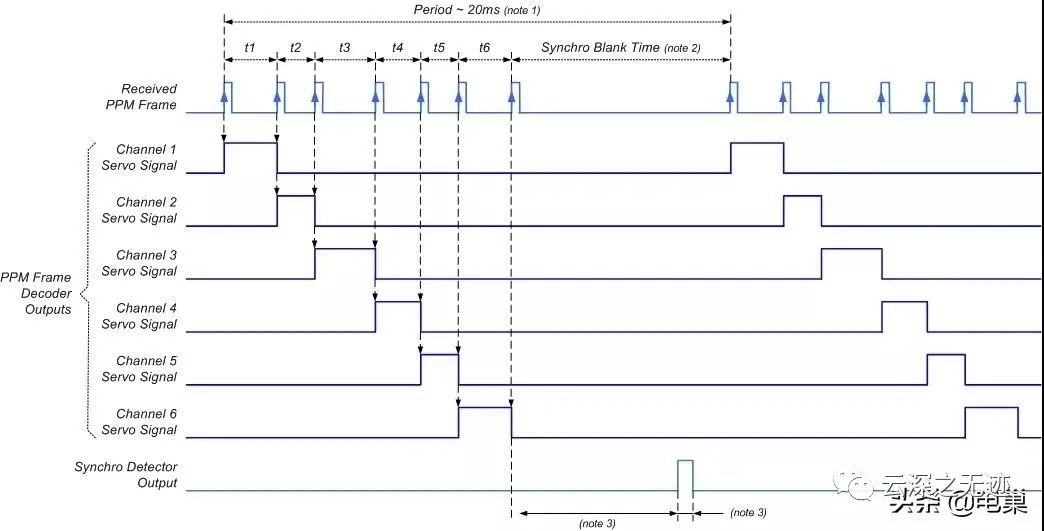
一个定时器就可以生成 PPM简单的将多个通道的数值一个接一个合并进一个通道,用2个高电平之间的宽度来表示一个通道的值。
PPM协议最多传输10个通道,使用一个定时器就可以轻松解决了。因为每一帧信号的尾部必须加入一个足够长的空白(显著超过一个正常PWM信号的宽度)来分隔前后两个信号,每一帧能传输的信号通道最多只能到10个。
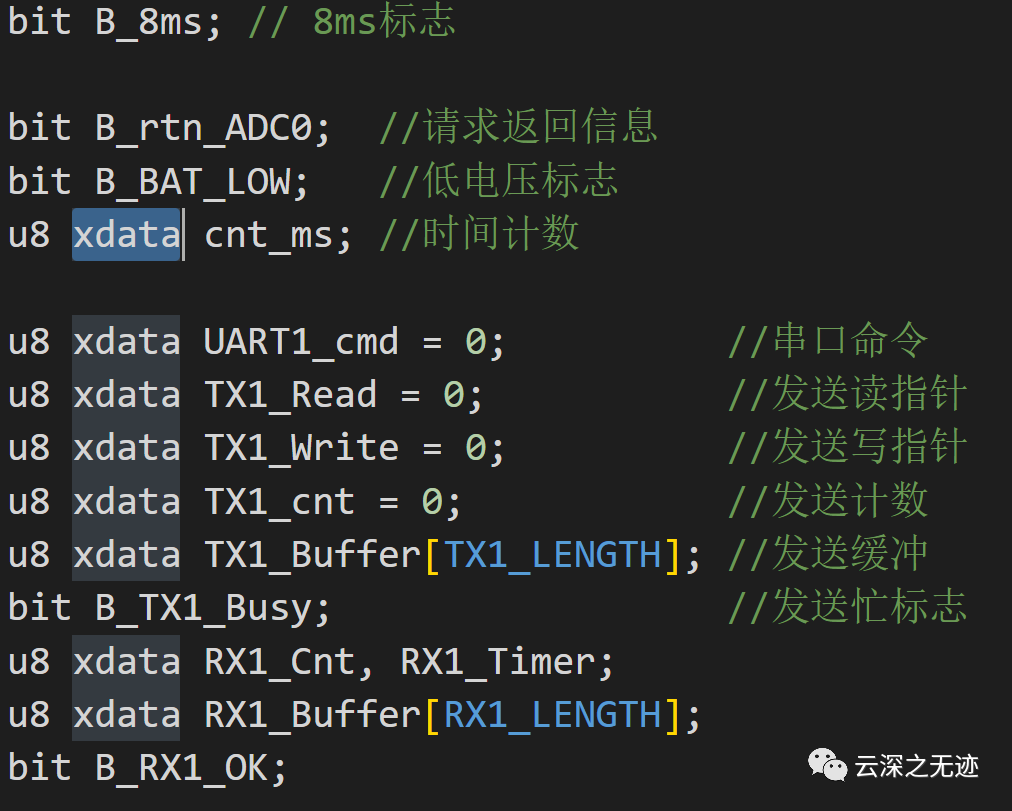
串口的一些配置
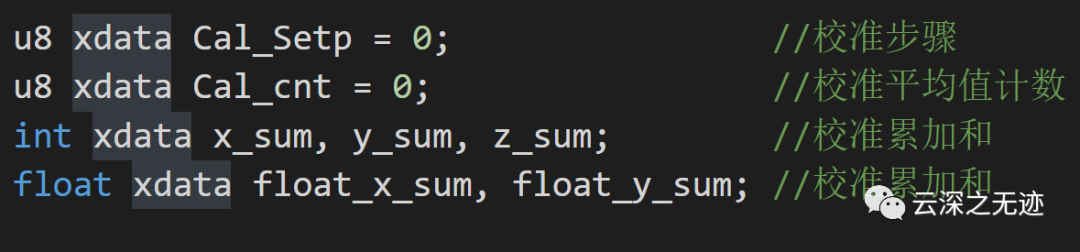
校准里面的一些变量
PPM定时器的一个计算
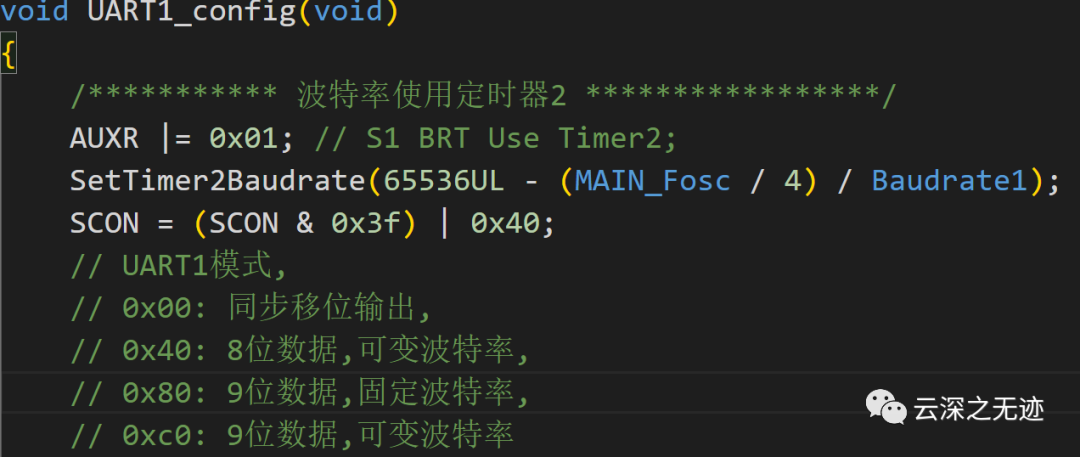
串口1的配置
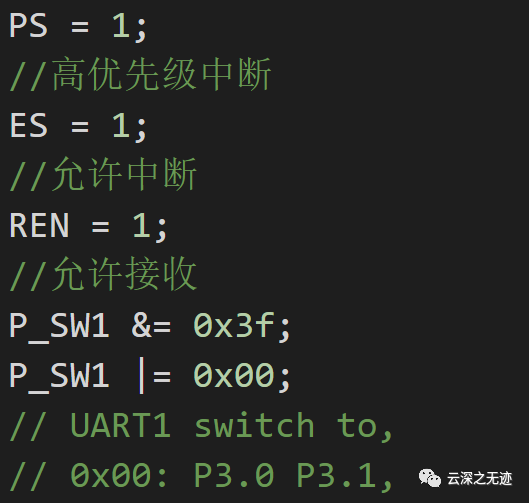
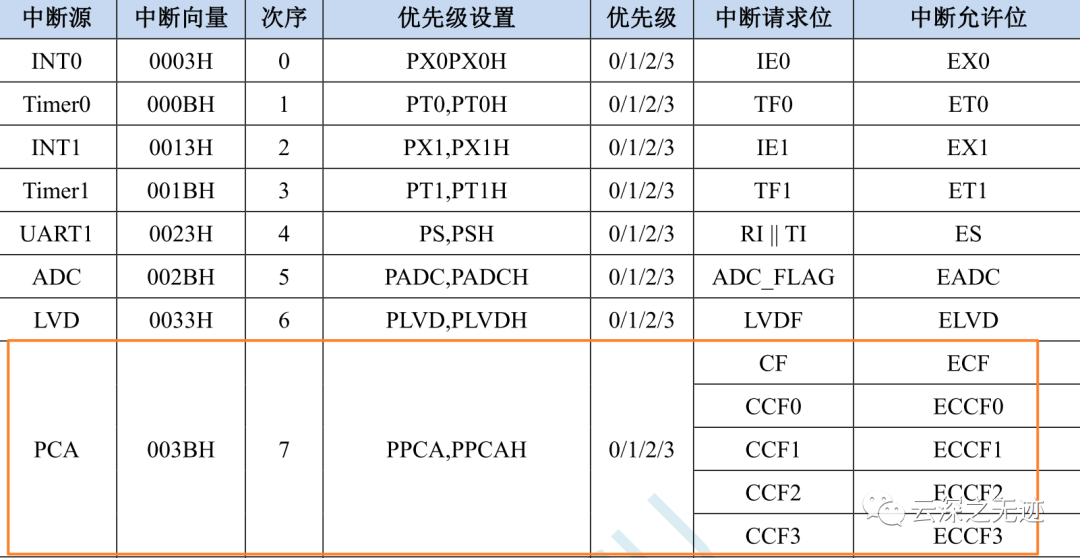
这个是中断的配置
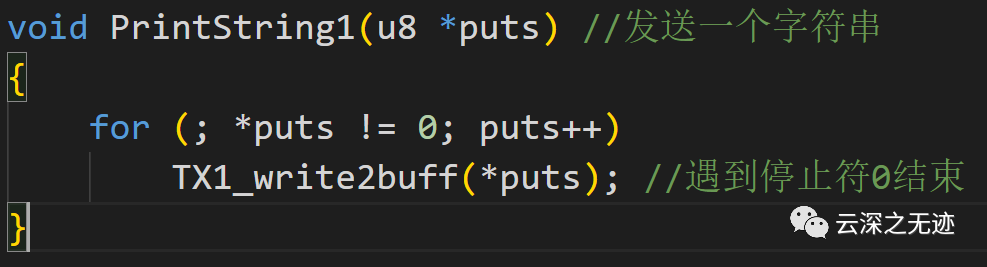
打印字符串
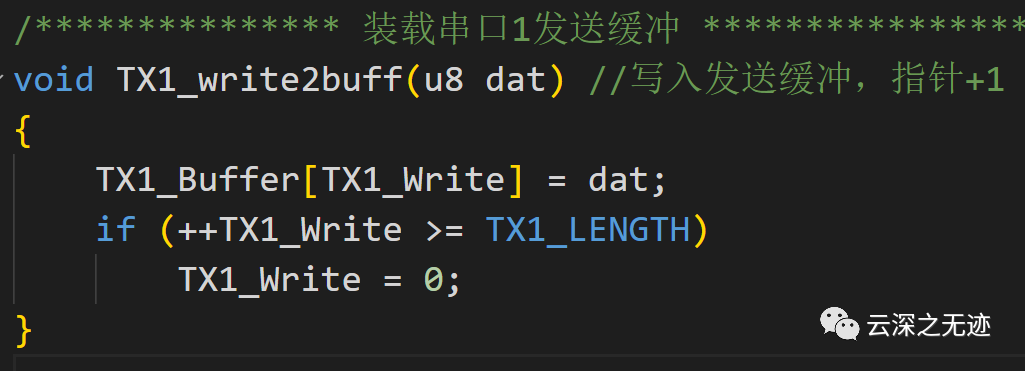
串口的信息写到缓存区
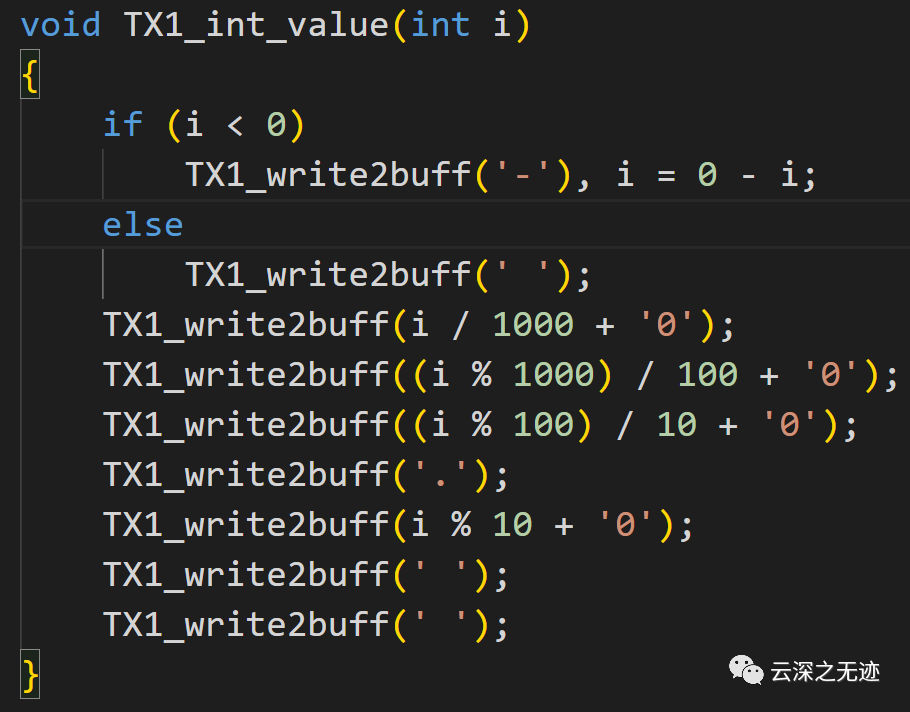
数字和字符的转换
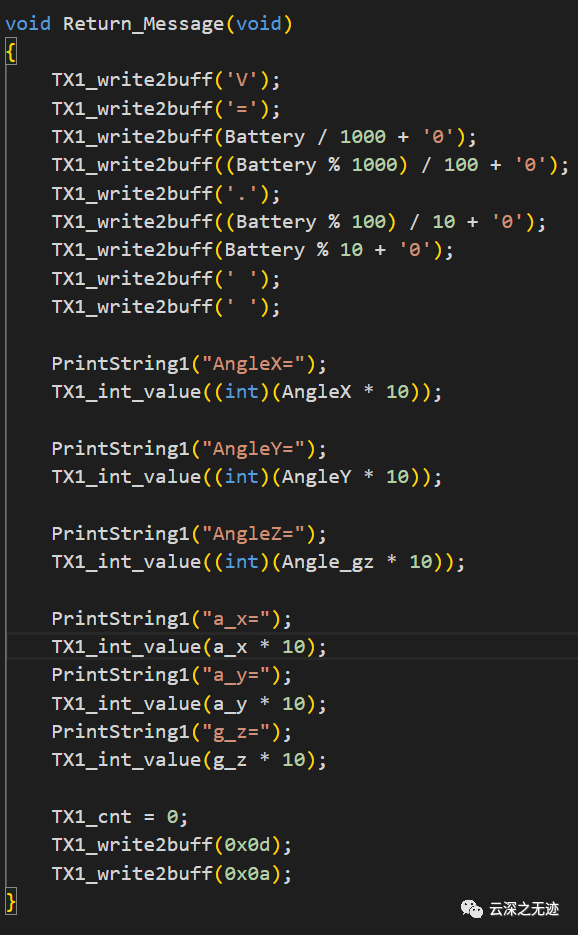
返回的参数信息
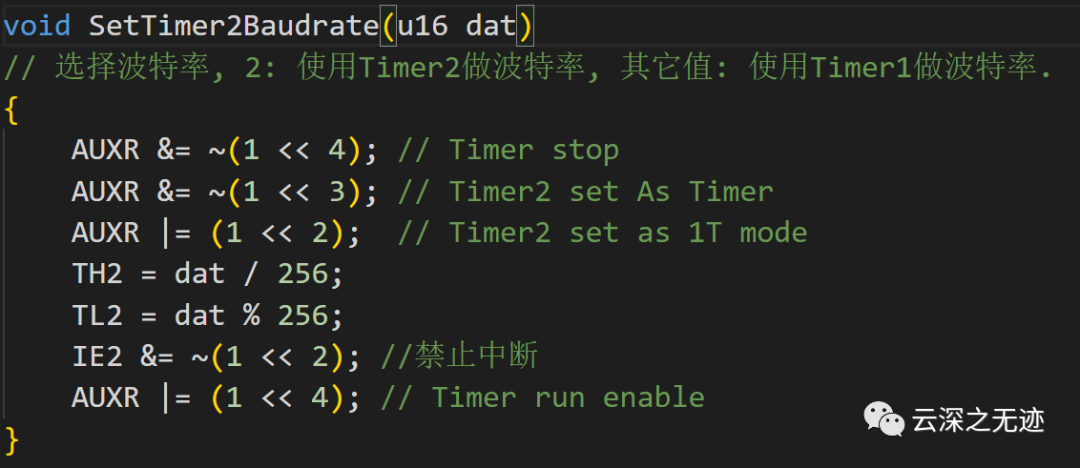
设置Timer2作为波特率生成器
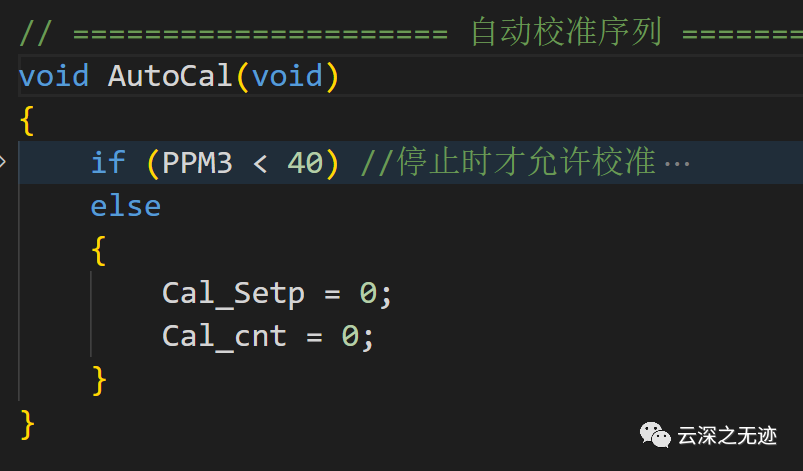
只有在规定的杆位下才可以进入校准序列
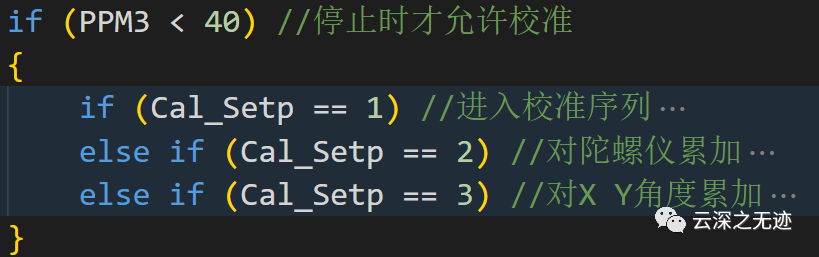
校准3个组件
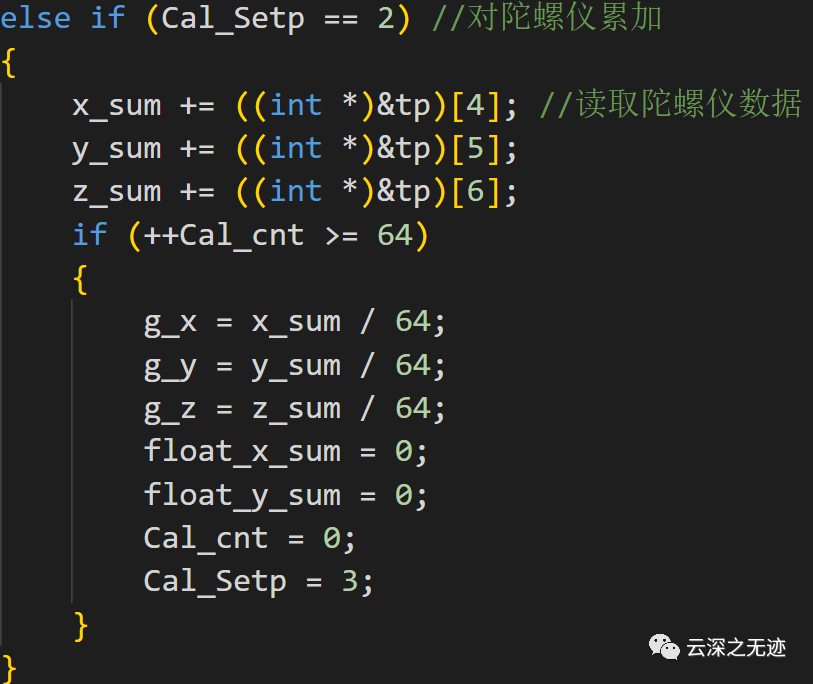
这个是具体的细节,也没有什么好说的
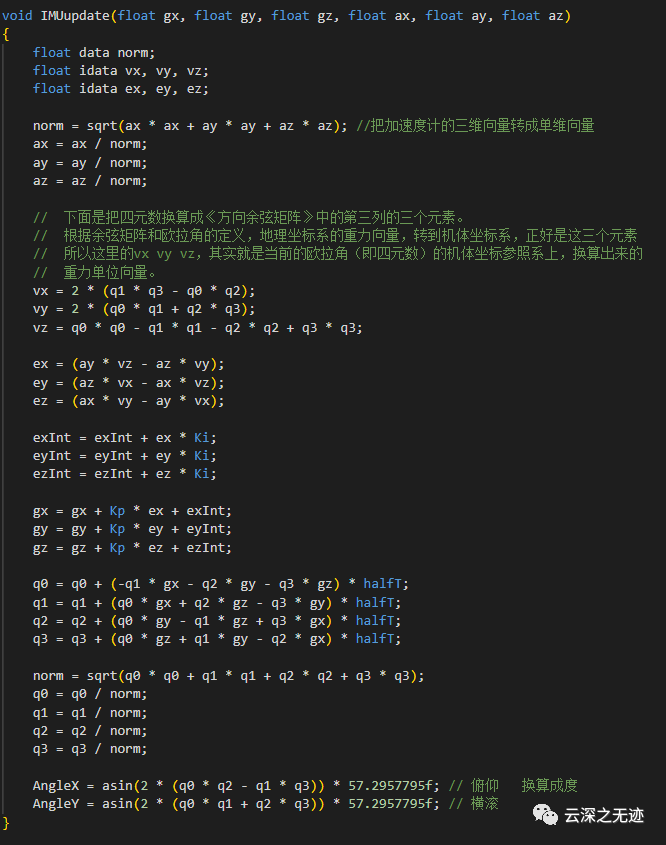
可以复用的代码,最后输出的是角度信息
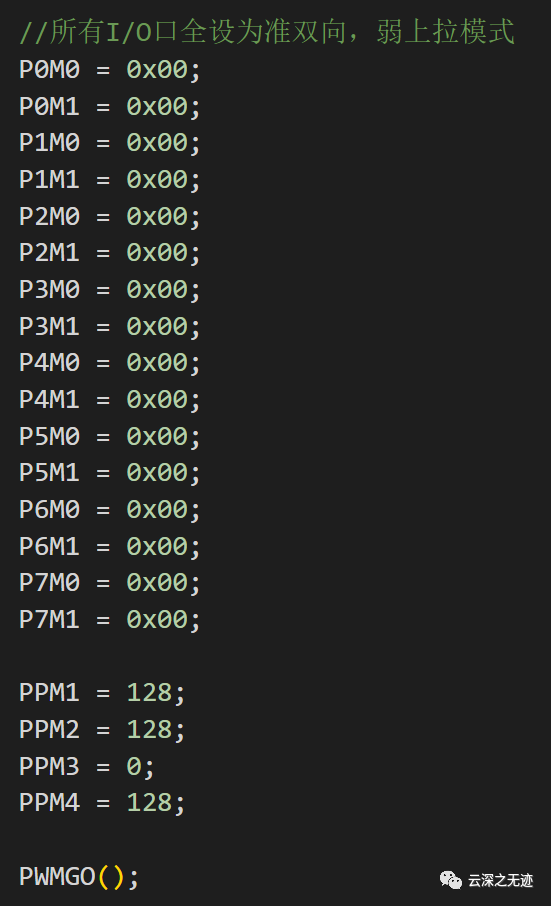
代码的端口先重置一下
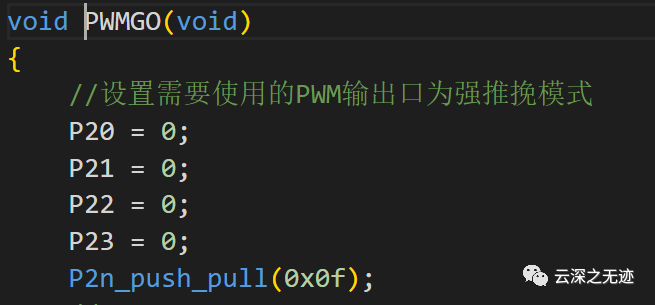
后面设置PWM的引脚
初始化ADC功能
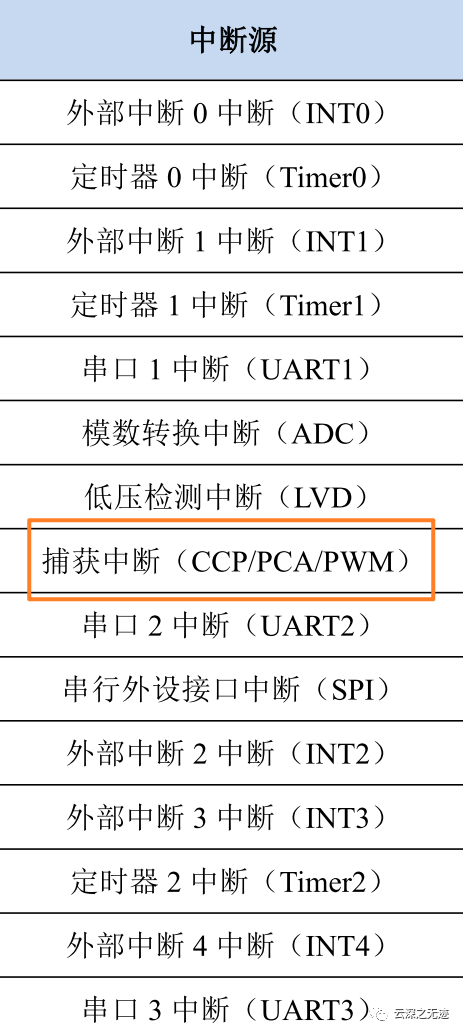
捕获中断
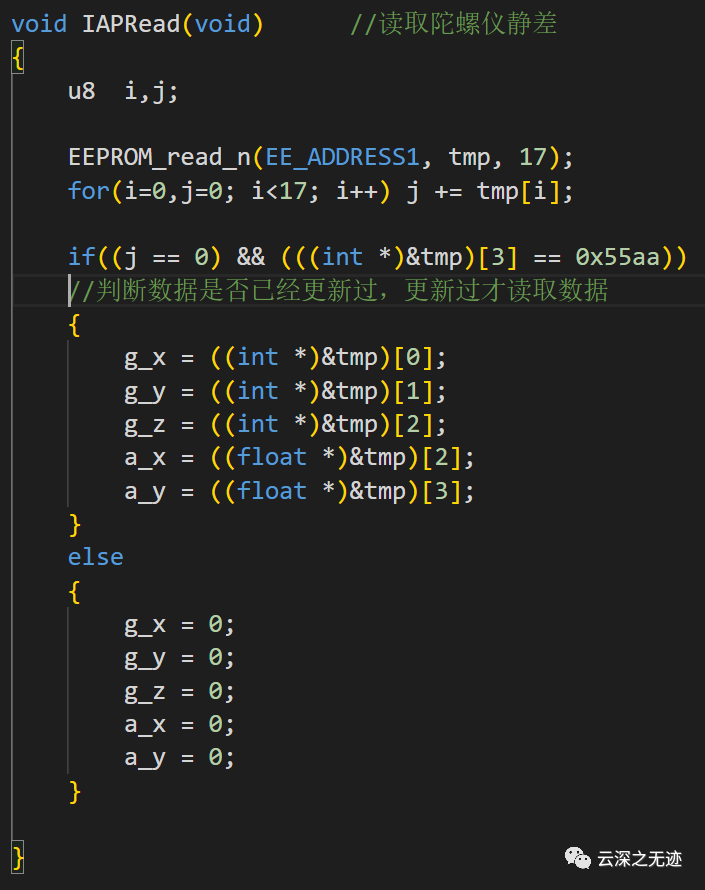
这个读取陀螺仪的静止误差是写到EEPROM里面的
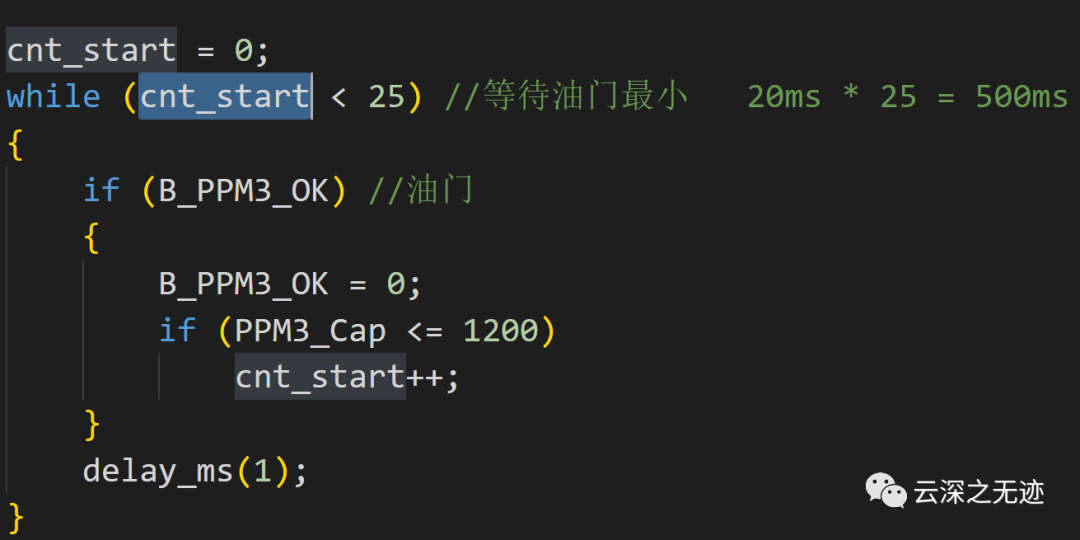
四轴上电待机:上电后,航灯不亮,接收机LED闪烁,此时打开遥控器,将左右油门下拉到最小,接收机收到信号LED常亮。
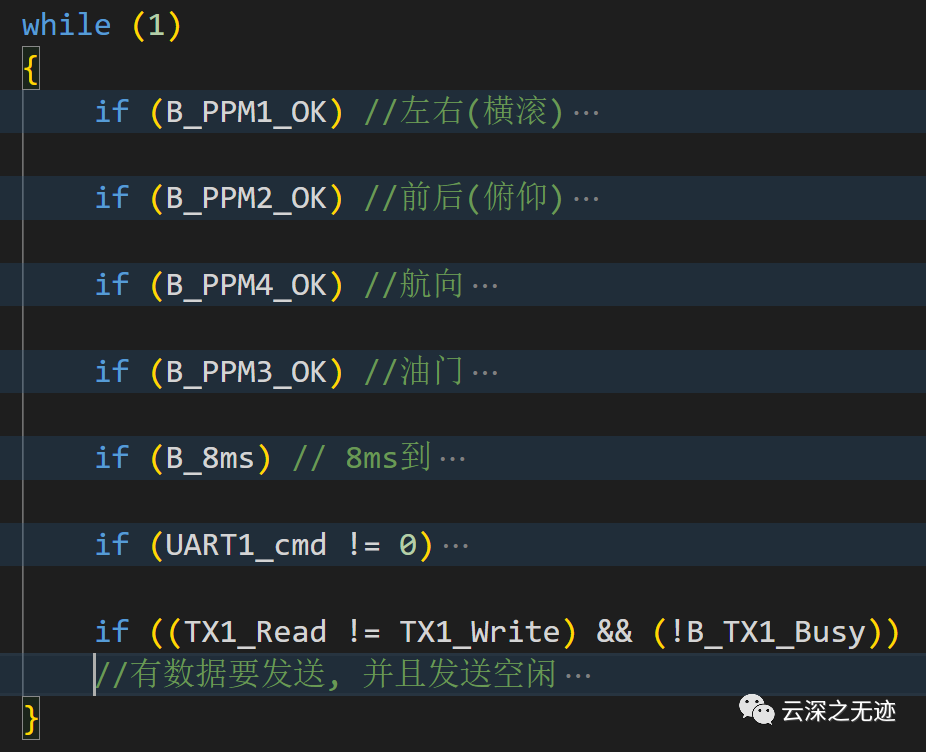
在一个大循环里面跑俩个任务,一个是解码PPM的具体数字信号,二是在中断里面检测一些特殊的打杆指令进入一些功能,还会有电压,蜂鸣器这些功能。
这个PPM的解码,很简单

通过算里面的脉宽来决定杆量
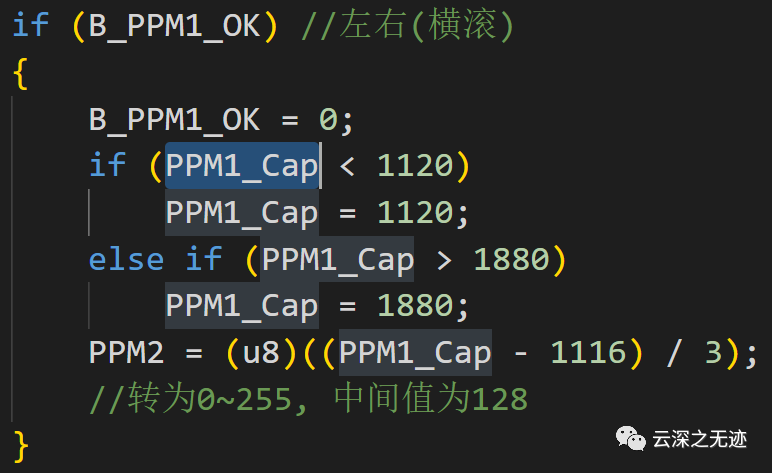
这个就是具体拿到以后校验和装载的过程

算好的值加到这里,给PWM输出去
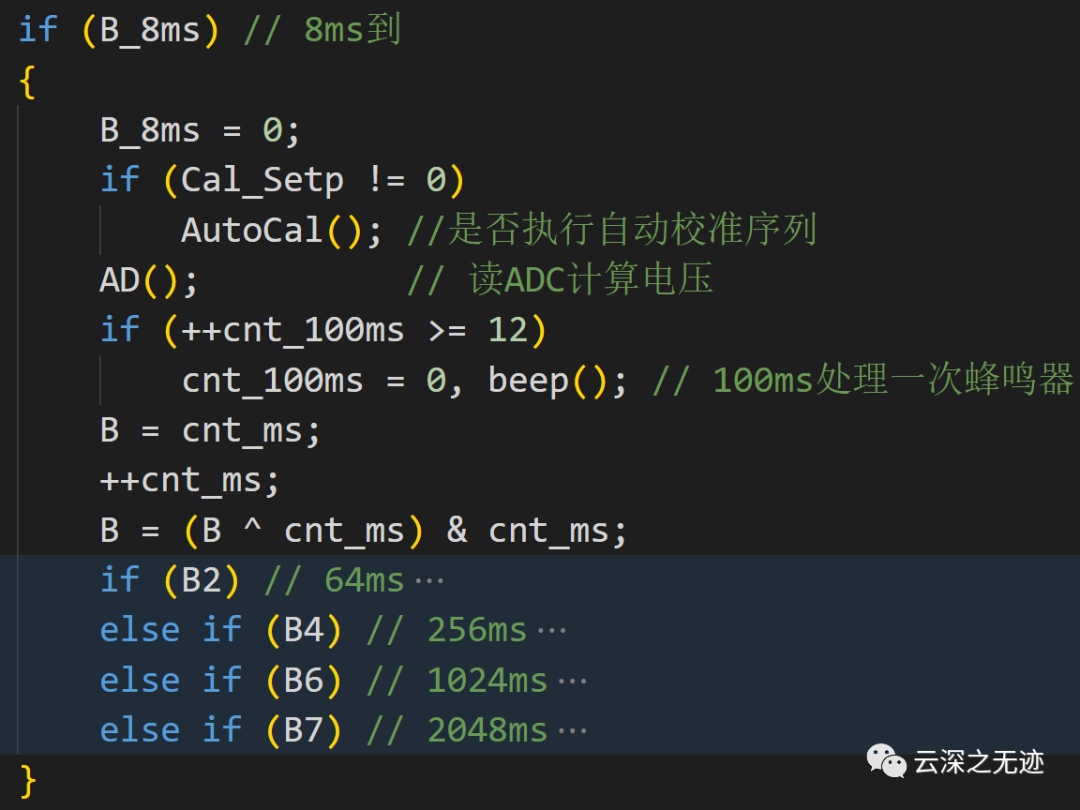
8ms???是个8ms的中断吗?
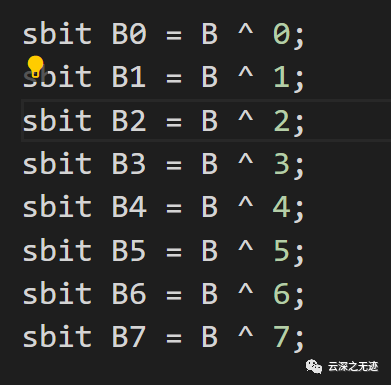
定义在这里
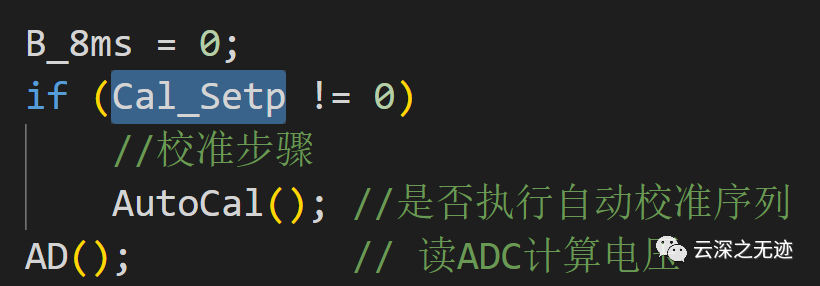
开始进入校准的步骤
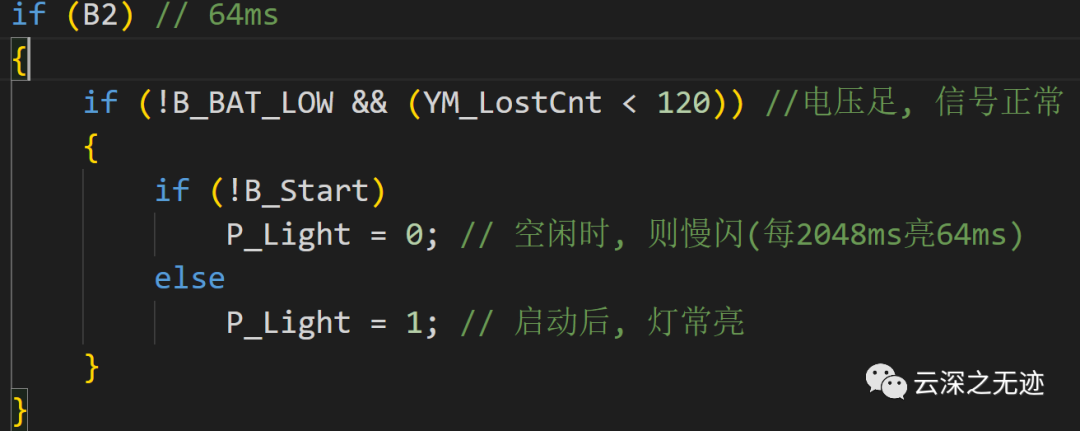
这个是电压的测量和蜂鸣器的控制
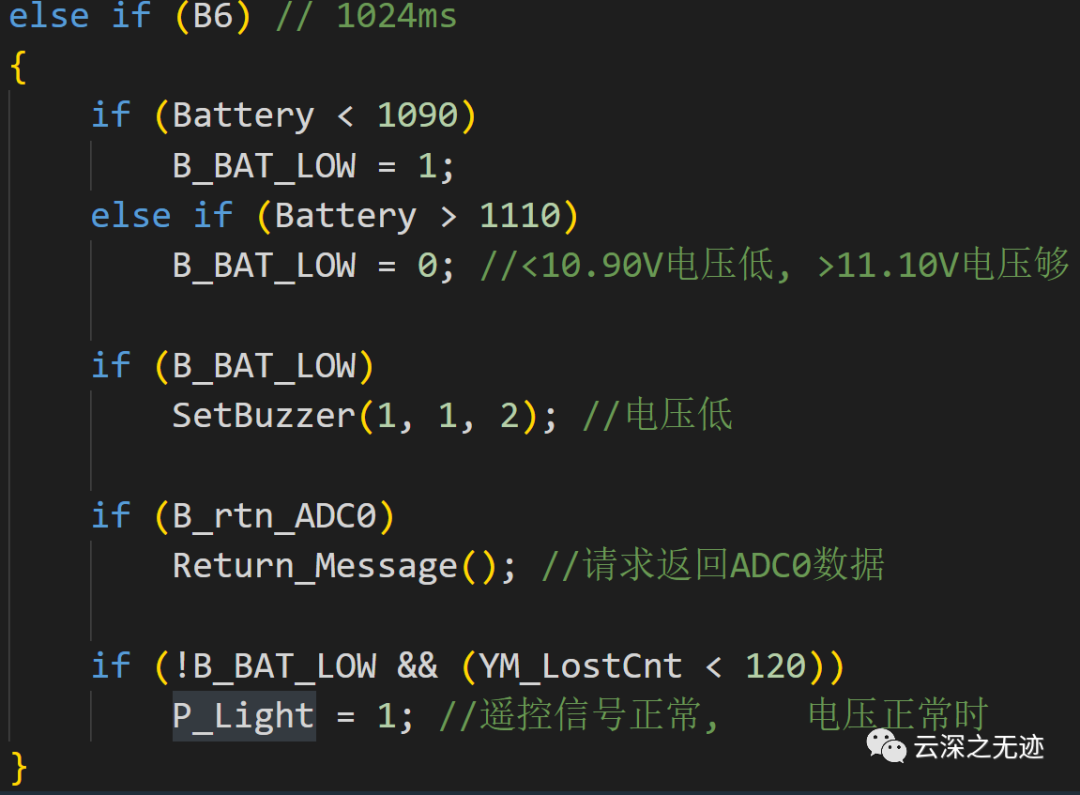
另一段测量

最后是上次讲的一个定义
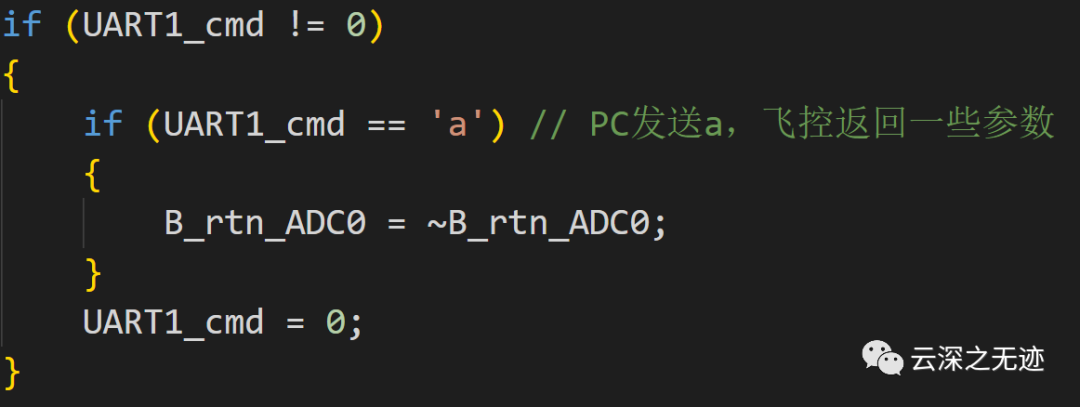
这个是串口的处理
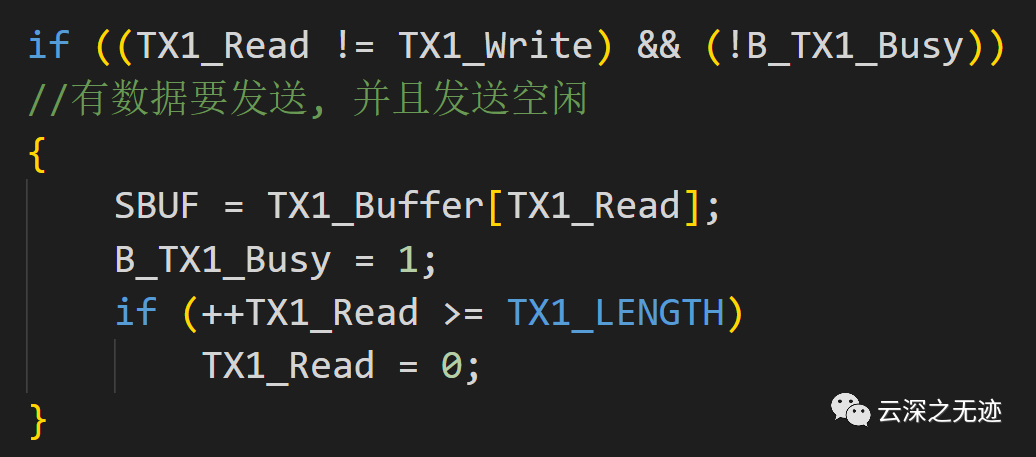
这个就是串口的发送功能。
审核编辑:刘清
-
STM32单片机无人机设计2025-03-10 1415
-
STC8A无人机-驱动篇2023-02-22 2286
-
STC8A及STC8F系列微控制器英文资料2022-10-25 884
-
STC8A/STC8F系列单片机头文件2022-02-23 1452
-
STC8A单片机应用开发2021-11-14 886
-
如何实现大四轴无人机的飞控设计2021-11-11 2466
-
四轴无人机设计2021-07-19 2094
-
山东无人机反制设备保障信息不被泄漏2020-08-12 1106
-
无人机商用测试征途2020-05-13 3235
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3833
-
无人机技术解答2017-11-15 29084
-
无人机增长也“闹心” 反无人机设备乘势而起2016-12-10 1659
-
无人机你们是知道了,那么反无人机有几个会知道?2016-09-26 5463
-
无人机保护长城去了。。。。。不要再黑我们可爱的无人机了2016-09-23 4950
全部0条评论

快来发表一下你的评论吧 !
