

一种类似于ICP算法的三维点自动配准方法
描述
<问题描述>
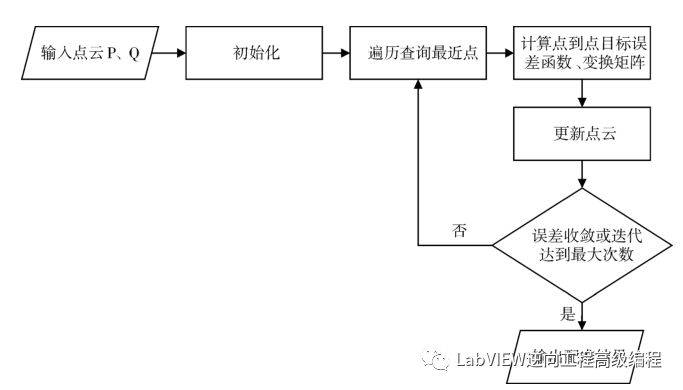
传统经典的方法就是ICP算法,Besl于1992年提出,称为ICP(最近点迭代算法)。该方法将输入的两片点云分别记为源点云P和目标点云Q,通过遍历搜索找到P、Q之间所有点的对应关系得出变换矩阵H,最后以两点距离的平方和作为目标误差函数,不断迭代计算,直至满足一定的误差收敛条件。
这个问题在很多方面都会遇到,比如相机的外参标定,在世界坐标系放置几个点,相机a在自己的坐标系下面看到的坐标是a1,a2,a3...an,相机b在自己坐标系下面看到的是b1,b2,b3...bn,如何将将相机a两个相机统一到a的坐标系下面。此时就会用到点的配准。
使用三维扫描进行物体扫描,要将一个物体完整的建模需要多个视角连续采集,每个视角相机的姿态都会存在变化,视角之间需要配准,通常的方法是在物体表面贴Marker点,通过识别Marker点的坐标,快速配准然后再局部优化。
Nonlinear Curve Fit 最适合输入数据点集(X,Y)的参数集,如非线性函数Y=f(X,a)所示,其中a是参数集。该方法使用Levenberg-Marquardt(列文伯格-马夸尔特)算法,是使用最广泛的非线性最小二乘算法。
使用这个函数来优化迭代找到最优的变换矩阵,核心是设置这个迭代的VI。
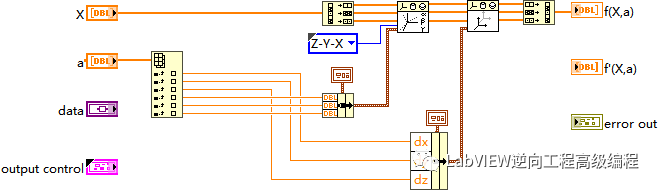
输入点先进行旋转计算,再进行平移计算,最后输出变换后的点集,通过迭代使得输出变换后的点集Q与目标点集P的差值最小。
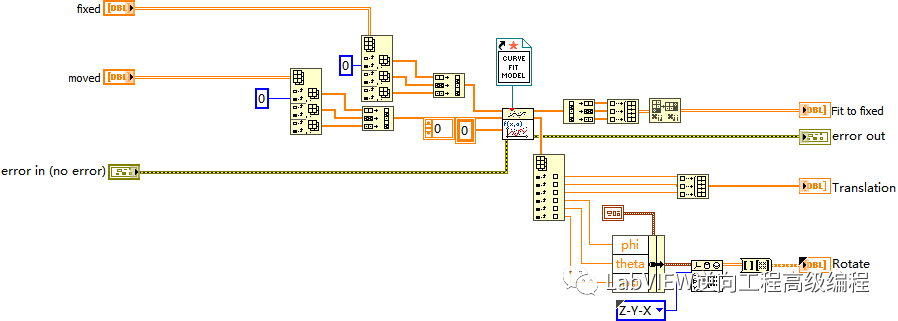
将源点云和目标点云变换为1D数组,通过Nonlinear Curve Fit 迭代,最后输出变换后的RT(旋转矩阵和平移向量)。
<结果验证>
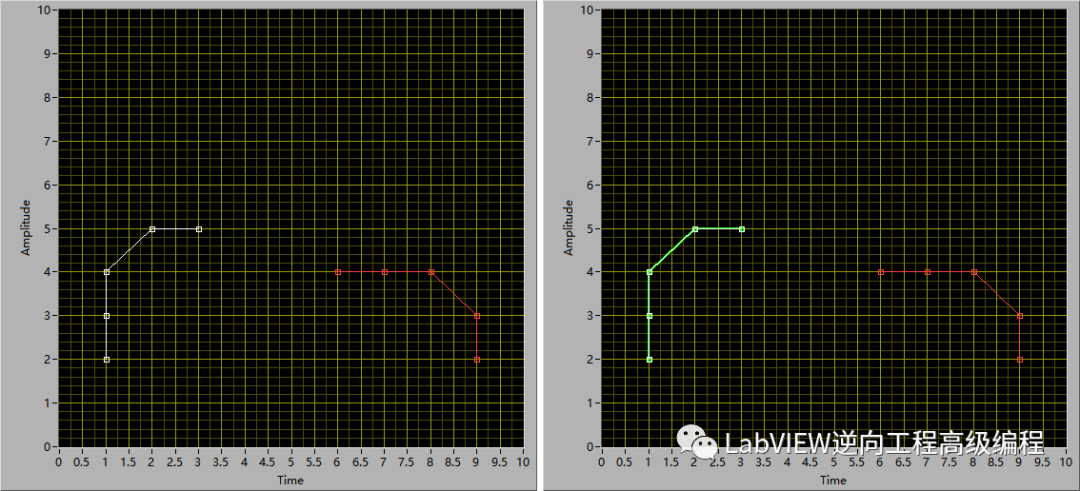

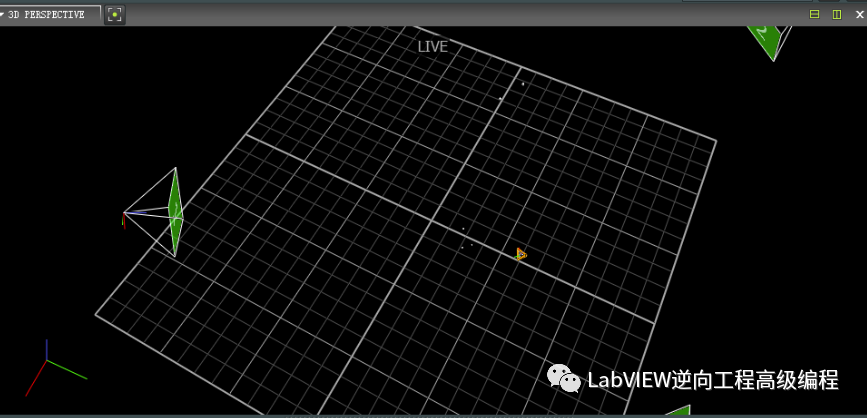
白色点是源点云P,红色线是目标点云Q,绿色线是配准后的Q,结果配准后的Q与源点集P重合。
这里提供了一种类似于ICP算法的一种方法,希望对大家有所启发!
审核编辑:刘清
-
基于深度学习的三维点云配准方法2022-11-29 2580
-
机器视觉之ICP算法和RANSAC算法2019-06-19 3764
-
基于角点的红外与可见光图像自动配准方法2010-05-12 646
-
一种快速的三维点云自动配准方法2013-09-23 778
-
计算机视觉中的ICP算法2017-11-16 7599
-
三维颅骨自动非刚性配准方法2017-12-09 690
-
基于平移域估计的点云全局配准算法2017-12-18 808
-
耳廓三维网格去补丁合并算法2018-01-09 769
-
基于分层策略的三维非刚性模型配准算法2019-01-23 1441
-
使用PCL进行点云数据粗配准算法的研究资料分析2019-03-01 2086
-
点云匹配与ICP算法基本思想2020-09-24 4734
-
一种多幅点云数据与纹理序列自动配准方法2021-03-18 1168
-
自动驾驶圈黑话:常用的点云配准方法以及未来发展方向2022-11-11 3184
-
三维点云配准过程及点集到点集ICP配准的算法研究2022-11-28 2785
-
基于深度学习的三维点云配准新方法2023-06-17 2511
全部0条评论

快来发表一下你的评论吧 !
