

NVIDIA Isaac ROS最新版本可为自主移动机器人提供开源机队管理工具
机器人
描述

NVIDIA在ROSCon 2022大会上宣布了Isaac ROS 软件的最新版本——Developer Preview (DP) 2版本。该版本包含用于AMR机器人机队的全新云/边缘机器人任务管理和监测软件,以及为ROS 2开发者提供的额外功能。
Isaac ROS由单个软件包(GEM)和完整的工作流程(NITROS)组成,可提供硬件加速性能。除了提高性能之外,新版本还增加了以下功能:
任务调度和客户端
一个用于从机队管理系统向机器人分配和监控任务的开源CPU包。任务调度是一项可以集成到更大机队管理系统中的云原生微服务。
自由空间分割
一个在机器人附近生成基于视觉AI的占位栅格,并以此作为导航堆栈输入数据的硬件加速包。
H.264视频编码和解码
用于压缩视频数据记录和播放的硬件加速包。视频数据采集是训练AI感知模型的一个重要部分。NVIDIA Jetson AGX Orin平台上的全新GEM性能是在2个速度为30fps(总速度>120fps)的1080p立体摄像机的情况下测得的,数据占用率减少了约10倍。
任务调度/客户端
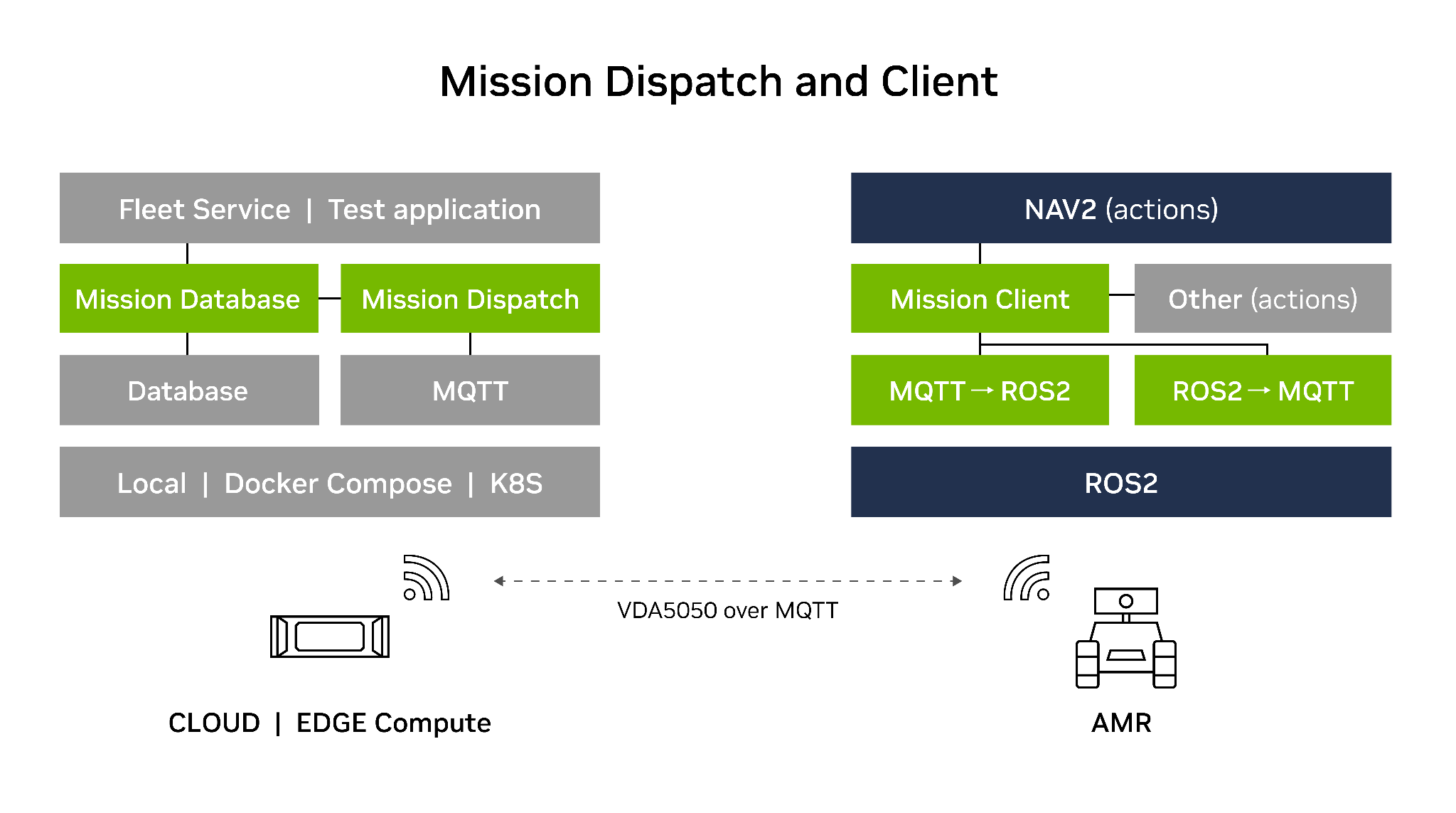
图1. 任务调度和任务客户端软件的结构
任务调度和任务客户端提供一种在机队管理系统和ROS 2机器人之间分配和追踪任务的标准开源方式。 任务调度和任务客户端使用一个专为机器人队设计的开放通信标准——VDA5050进行通信。信息则通过一个用于物联网(IoT)应用的轻量级信息收发协议——MQTT无线传输。
任务调度是一个可从NGC或者从Isaac GitHub上的源码下载的容器化微服务,并且可以集成到机队管理系统中。任务调度已被证明可与其他开源ROS 2客户端实现互操作,比如最近发布的由OTTO Motors和InOrbit开发的VDA5050连接器。
兼容ROS 2 Humble的任务客户端在Isaac ROS GitHub中以软件包的形式提供,并与Nav2导航堆栈预先集成,用于分配和追踪机器人上的导航等任务。
OTTO Motors首席技术官Ryan Gariepy表示:“随着现实世界中的移动机器人部署速度越来越快,交互操作性变得愈加关键。将VDA5050与ROS2组合成一个开源社区能够促进机队管理解决方案的创新,同时使机器人制造商能够专注于差异化。”
Isaac ROS提供领先的性能
Isaac ROS能继续为ROS 2开发者社区提供用于AI感知、图像处理和导航的硬件加速性能。自主机器人需要具备先进的AI和计算机视觉能力,而Isaac ROS体现了我们致力于帮助机器人社区更容易地采用这些尖端技术。
在此处查看Isaac ROS包的最新性能数据。

图1 BI3D模型在平面无特征表面上的立体深度性能提高。
中间是DP1.1版本,右边是DP2版本。
为ROS 2开发者提供免费培训
为了提供高级技术培训和接触Isaac ROS专家的机会,NVIDIA宣布将举办一系列主要针对ROS 2开发者的新网络研讨会。这些分会将免费提供,除此之外,为ROS 2开发加速模块的技术专家还将在会上回答与会者提出的问题。
前三场网络研讨会的主题如下:
2022年11月14日:“精准定位,250帧,ROS 2定位与Jetson上的vSLAM”,由Raffaello Bonghi博士主讲。
11月(待定):“使用Isaac ROS进行立体深度估算”,由Hemal Shah主讲
12月(待定):“使用YOLOv5构建Isaac ROS加速模块”,由Asawaree Bandhi主讲
-
Labview My RIO 移动机器人2016-08-21 13665
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 4151
-
基于LPC2119的自主式移动机器人设计方案2020-05-11 2217
-
家庭移动机器人避障常用传感器及相关技术2020-05-14 3824
-
如何实现移动机器人的设计?2020-11-23 3332
-
什么是移动机器人软硬件系统问题2021-08-06 2537
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 1610
-
如何导出移动机器人URDF模型2021-08-30 1439
-
如何利用扫地机轮子制作ROS移动机器人地盘2022-01-14 1365
-
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现2023-06-28 2204
-
用NVIDIA Omniverse ISAAC Sim加速机器人仿真2022-04-27 4480
-
仓库和工业自主移动机器人2022-12-30 1759
-
COMPUTEX2023 | NVIDIA Isaac AMR 助力移动机器人实现高级自动化2023-06-04 1490
-
NVIDIA Isaac 平台先进的仿真和感知工具助力 AI 机器人技术加速发展2023-10-20 2610
-
使用 NVIDIA Isaac 仿真并定位 Husky 机器人2023-12-26 3954
全部0条评论

快来发表一下你的评论吧 !
