

ABB机器人IRB1410零点计数器更新方法教程
机器人
描述
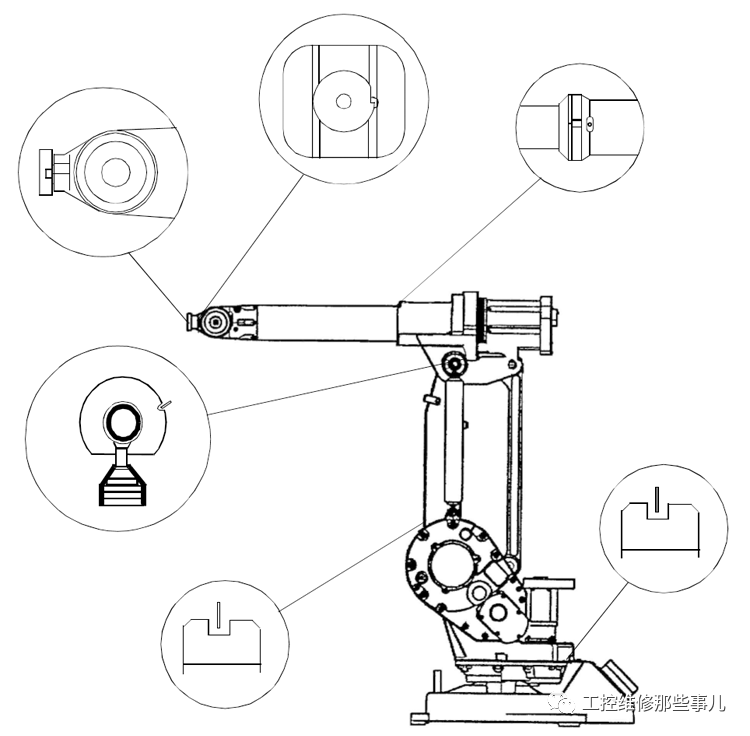
同步标记(ABB IRB1410)
下图所示:irb 1410的校准范围位置。
更新转数计数器
简介:本节介绍如何对每根操纵器轴执行粗略校准,即使用FlexPendant更新每根轴的转数计数器值。
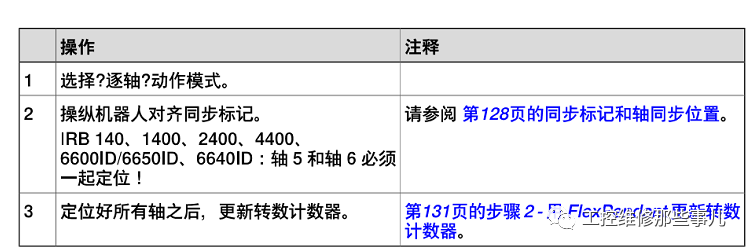
步骤1:手动将操纵器运转至同步位置
按本步骤手动将机械臂运行到同步位置。
轴4和轴6的正确校准位置
当操纵机械臂至同步位置时,应确保下述机械臂的轴4和轴6正确定位,这一点极为重要。否则,这些轴可能会按错误的顺序进行校准,从而导致机械臂校准错误。
确保这些轴按照正确的校准值而不仅仅是校准标记进行定位。在位于下臂上底座或框架法兰盘下的标签上可找到正确的校准值。
操纵器出厂时已正确定位,因此在转数计数器更新前,切勿在通电状态下旋转轴4或轴6。
如果在更新转数计数器之前将下述各轴从其校准位置旋转一周或数周,就会因齿轮速比为非整数而偏离正确的校准位置。这将对以下机械臂产生影响∶

如果同步标记似乎错误(即使电机校准数据正确),请尝试旋转轴一次、更新转数计数器并再次检查同步标记(如有需要,两个方向都尝试)。
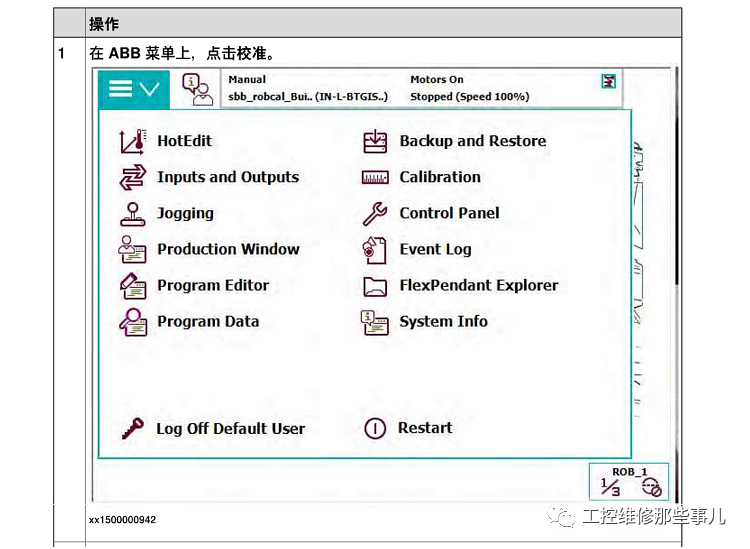
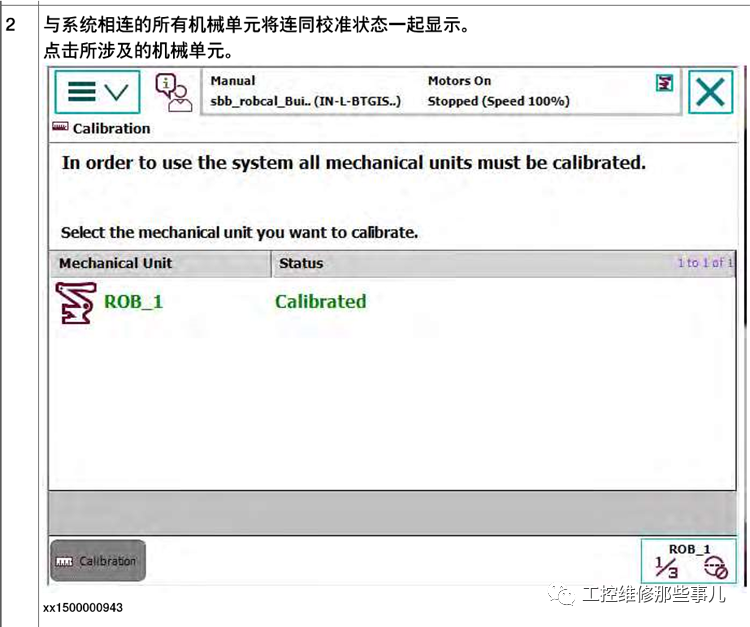
步骤2:用FlexPendant更新转数计数器
使用此步骤通过FlexPendant (IRC5)更新转数计数器设置。
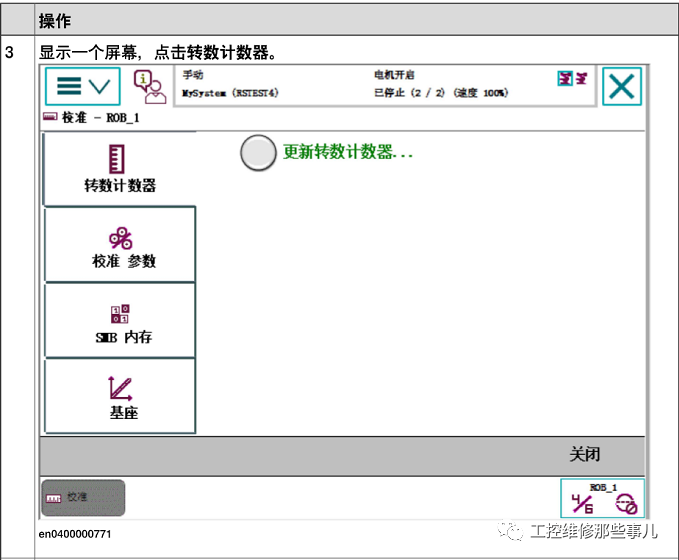
4:点击更新转数计数器...。
一个对话框显示,警告更新转数计数器可能会改变预设机器人位置:
·点击是更新转数计数器。
·点击否取消更新转数计数器。
点击是显示轴选择窗口。
5:选择需要更新转数计数器的轴:
·勾选左边的复选框
·点击全选更新所有的轴。
然后点击更新。
6:一个对话框显示,警告更新操作不能撤消∶
·点击更新以继续更新转数计数器。
·点击取消以取消更新转数计数器。
点击Update (更新)以更新选定的转数计数器,并取消轴列表中勾选的项。
审核编辑:汤梓红
-
ABB机器人示教器转数计数器更新的步骤2023-06-07 11400
-
下方进行ABB机器人IRB1200转数计数器操作方法2022-11-08 5590
-
ABB机器人实训平台实验2021-07-01 2759
-
ABB-IRB140工业机器人技术样本2021-05-17 1273
-
ABB-IRB2400工业机器人技术样本2021-05-13 1427
-
ABB工业机器人IRB-6650S-手册2021-05-11 1509
-
运行的机器人遭遇突然停电,如何找回零点?2021-02-12 11399
-
RCX240S 雅马哈机器人控制器维修保养2020-10-31 4269
-
ABB机器人驱动器相关故障维修型号有哪些?2020-10-10 2175
-
ABB全球首发IRB 1300小型机器人2020-09-21 6205
-
ABB推出了IRB 1100机器人,其迄今最紧凑、最轻量的六轴机器人2018-09-20 6342
-
详细分析ABB工业机器人2017-09-29 2221
-
零点标定的情况与机器人零点标定方法2017-09-19 3351
-
ABB IRB5400-喷涂工业机器人2015-01-14 10131
全部0条评论

快来发表一下你的评论吧 !
