

基于DSP的交流伺服电机控制系统
电子说
描述
DSP(Digital Signal Processor)是一种非常独特的数字信号微处理器,顾名思义,DSP是以数字信号来处理工作中的大量信息的电子器件。其工作原理是接收传来的模拟信号,然后转换为0或1的数字信号,再通过对数字信号的修改、删除、强化,在其他的系统芯片中把数字数据解译回模拟数据或实际环境格式。
一、 交流伺服电机的控制原理
1、 伺服控制
目前,理论界关于伺服控制概念的提法很多,但是,这些提法都同意伺服控制是指对物体运动的有效控制,即对物体运动的速度、位置、加速度进行控制。这种控制正在变得随处可见和越来越普遍。
2、 伺服组件
伺服组件是由伺服电动机、机械减速或这耦合机构、伺服控制器以及传感器等部件组成的一体化的有机伺服机构。
3、 交流电机的伺服控制
交流伺服电机的主体是由内部的永磁体转子、驱动控制器以及U/V/W三相电形成的电磁场构成。电机工作时,转子在此磁场的作用下开始转动,同时交流伺服电机自带的编码器会反馈信号给驱动器,而驱动器则根据反馈值与编码的目标值进行比较,以调整转子转动的角度。可以说交流伺服电机的精度决定于编码器的精度。更高级的交流伺服电机的控制系统也更加精确和复杂,往往会包涵包括驱动器在内的多层微机控制。
二、 交流伺服电机控制系统的总体结构
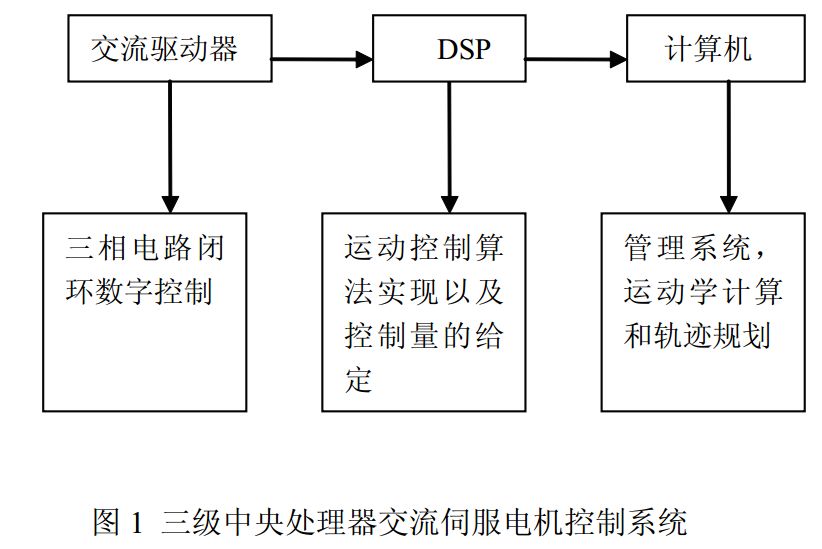
本文讨论的交流伺服电机模型采用了三级中央处理器进行控制。三级的中央处
理器控制具体包括:(1)第一级中央处理器,这一层是通过交流驱动器来实现交流伺服电机的U/V/W三相电路闭环数字控制,这也是基础层的控制;(2)第二级中央处理器,这一层是通过D SP来完成交流伺服电机的运动控制算法实现以及控制量的给定,这也是本文讨论的核心;(3)第三层中央处理器,这一层是通过计算机来管理整个系统,并且进行运动学计算和轨迹的规划。详情见图1。
三、 双模控制算法
模糊PD结合单神经元自适应PID的双模控制算法相较于一般的控制算法具有很强的优势。首先,模糊P D有较强的鲁棒性,在运动控制的适用中的表现优于其他的控制方式。一般的,为了能够确保交流伺服电机的控制实时性,都会先将连续的控制器输入量进行离散化,而在线控制时则通过系统查表的方式得出需要的控制量,在这个过程中使用模糊控制会对控制精度带来消极的影响。而单神经元控制则能控制精度,但是在输入量变化范围较大的时候,调整的速度会变慢。因此,结合两种控制算法的优点的双模控制算法具有很强的适用优势。
为了将模糊P D与单神经元合理的结合起来,
四、 FCMAC控制算法在交流伺服电机控
制中的运用小脑模型关节控制器(C M C A),是由J.S.Albus于1975年提出的。CMCA是一种典型的局部逼近神经网络,是对人类小脑活动的一种模拟,由于CMCA具有线性结构以及算法简单等特点,其应用范围非常广泛。本文
提到的FCMCA就是其中的一种,FCMCA,即模糊小脑模型关节控制器,它与BP网络之类的全局逼近算法相比,学习的速度更快,也更适合于在线学习,到目前为止,已经成功的用于许多领域。
伺服系统向着全数字化的方向发展,而高性能DSP器件的出现为其奠定了坚实的基础。从国内外最新的发展情况来看,国外很多公司都已推出了基于D SP的成型的全数字交流伺服产品,象国内引进较多的日本松下、安川等交流伺服系统。目前,国内的控制界也己掀起了利用DSP来实现交流伺服系统的热潮。另外,采用高性能控制策略的控制系统具有很好自适应能力和抗干扰能力,能够在参数时变及干扰等恶劣的工况下保证系统良好的动态和稳态性能。克服了基于常规控制理论设计的电机控制系统存在的缺陷和不足。本文的主要任务是设计一种基于DSP和CAN总线技术的高性能全数字化伺服系统。采用电流、转速双闭环控制方式对永磁同步电动机进行速度和位置控制。
审核编辑:郭婷
-
基于DSP的交流伺服电机控制2010-02-25 12482
-
交流伺服电机在数字控制系统中的应用2021-09-17 1335
-
基于DSP和功率模块的电机伺服控制系统2009-07-08 590
-
基于DSP交流伺服电机控制的制动系统的设计2009-08-29 559
-
用交流伺服电机和PLC改造液压控制系统2009-09-18 1019
-
基于多DSP架构的电机控制系统.pdf2010-03-12 579
-
基于DSP交流电机模糊PID控制系统的设计2016-04-05 943
-
基于DSP的永磁同步电机交流伺服控制系统2016-04-18 899
-
基于自抗扰控制器的交流直线永磁同步伺服电机速度控制系统2016-04-25 833
-
基于单片机的交流伺服电机控制系统2016-04-26 717
-
基于DSP的直流位置伺服控制系统2017-02-08 1092
-
基于矢量控制的永磁同步交流伺服电机控制系统2017-01-21 1230
-
基于矢量控制的永磁同步交流伺服电机控制系统程序2021-09-23 1505
-
基于DSP的永磁交流伺服控制系统开发2021-09-28 1606
-
交流伺服电机控制系统是什么?2023-03-16 1863
全部0条评论

快来发表一下你的评论吧 !
