

探讨一下多功能相控阵雷达仿真系统
描述
这个“多功能相控阵雷达仿真系统”以多功能相控阵雷达为建模对象,完成如下主要工作:
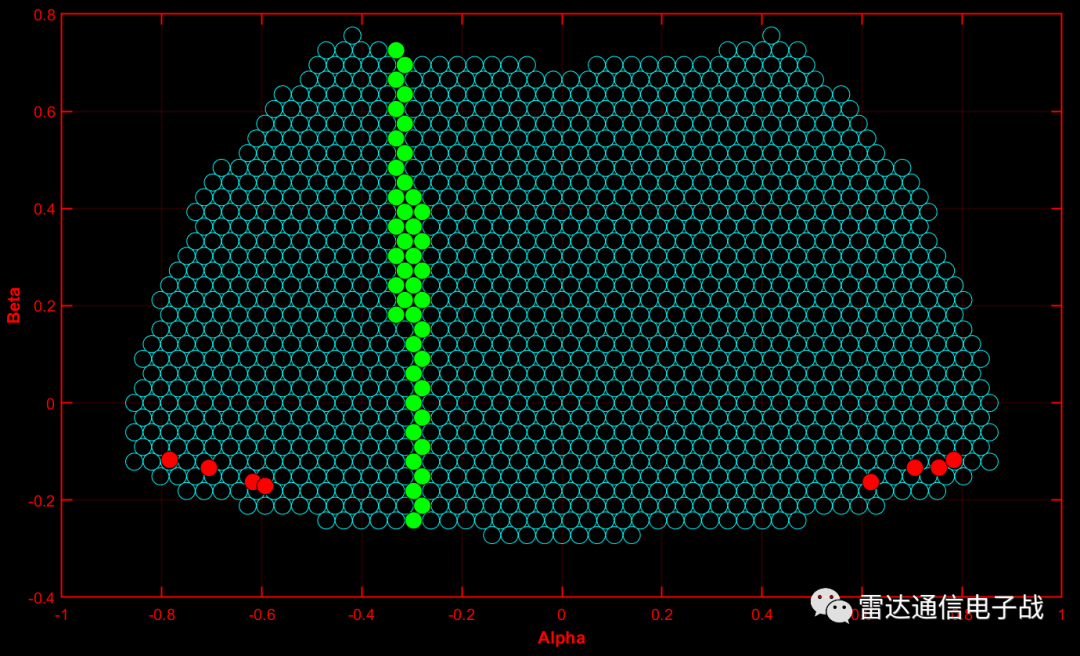
1. 按照三角形、矩形排列方式,完成了空域波位编排,输出正弦空间坐标系、雷达站球坐标系内的波位编排表。
2. 考虑跟踪、确认、失跟、搜索四种典型雷达事件,在考虑静态优先级顺序的基础上,兼顾四类波束请求数量,完成了雷达自适应调度仿真。
3. 提出了一整套的多目标航迹管理方法,包括航迹起始、航迹终结、航迹关联、状态预测与更新等完整的过程。
4. 对相控阵雷达四种工作方式切换逻辑进行了设计,配合雷达自适应调度,能够满足相控阵雷达在多目标环境中搜索、确认、跟踪目标的多类型任务。
5. 通过引入当前统计模型,改善了Kalman滤波器的性能,尤其是在目标大机动场景下能够更加准确地预测、估计目标位置,从而为波束指向确定奠定良好基础。
6. 针对相控阵天线建模仿真这一仿真瓶颈问题,采用理论模型逼近法,针对传统的和通道、方位差通道、俯仰差通道接收模式,对天线仿真模型进行分析、设计与建模,完整地复现出相控阵天线增益和波束宽度随着波束扫描角动态变化的特性和规律。
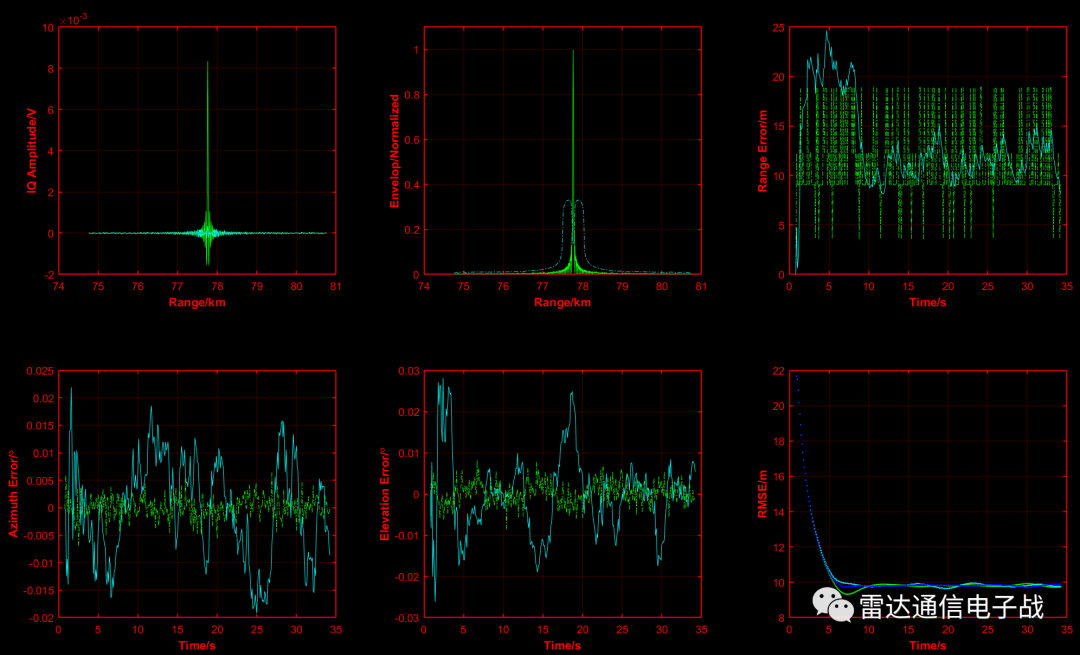
7. 借助于相干视频建模仿真手段,加入了完整的信号处理模型,涵盖发射信号、接收信号、接收机热噪声、脉压处理、包络检波、恒虚警检测、采样点合并处理、距离误差提取、角度误差提取、径向速度测量等诸多环节,能够科学地表述各环境因素对雷达目标检测的影响效应,同时输出处理各关键环节的波形信息。
8. 加入了六种典型干扰样式,包括宽带噪声压制、数字多延时灵巧噪声干扰、间歇采样转发干扰(切片干扰)、距离波门拖引干扰、移频转发干扰(多假目标)、拖曳式诱饵干扰,通过将干扰加入雷达信号处理环节,能够定量地描述干扰因素对雷达目标检测的影响,进而对雷达系统的整体作战效能产生影响。
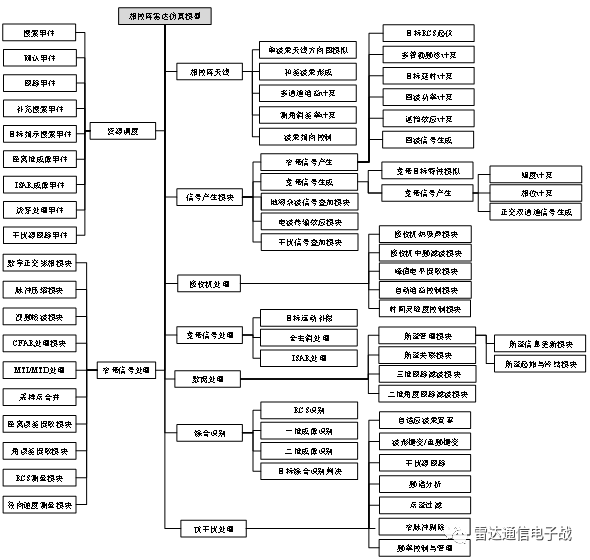
9. 借助MATLAB平台,构建了多功能相控阵雷达系统仿真工具箱,即MPARSim,通过通用化、模块化设计思想,可为深入研究事件调度、信号处理、数据处理、航迹管理等现代雷达系统的关键功能提供仿真平台支撑。
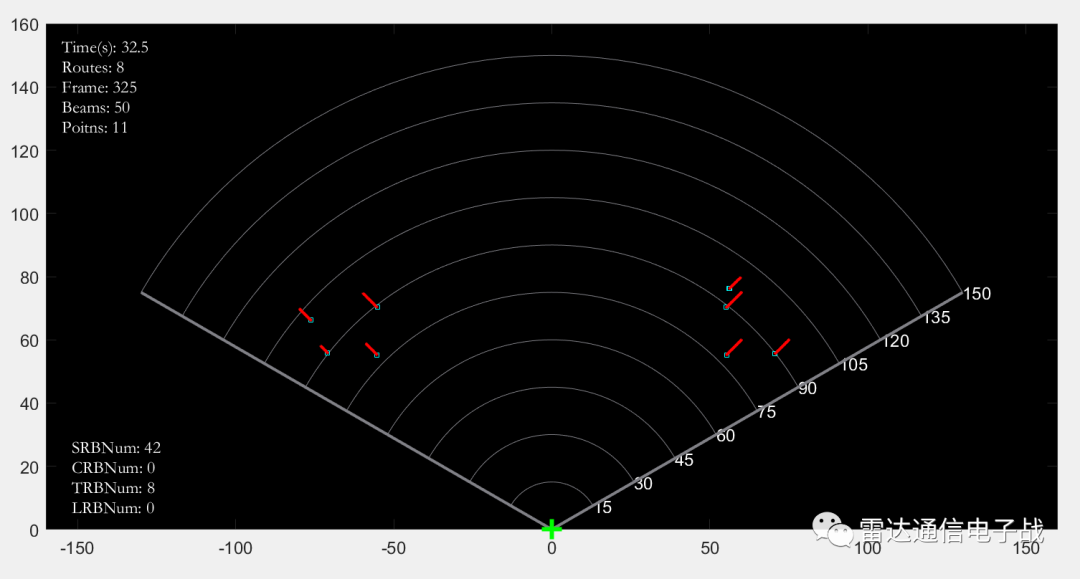
10. 设定典型多目标实验场景,结合给定的雷达战技参数,开展事件调度与多目标航迹管理仿真,同时对二维波束电扫模式进行直观展示,进一步通过雷达P显、一次/二次信息等综合显示,完整地展现相控阵雷达系统的工作过程。
11,通过阵元直接合成,生成平面阵列天线的准确方向图,用于替代上一版本中的传统模拟和差接收天线方向图模型。
12,通过模块化、组件化设计,完整地表述了发射信号样式/参数确定、发射方向图合成、发射信号生成、电波前向传输效应、目标后向散射效应、电波后向传输效应、单个阵元接收信号计算、数字波束形成(DBF)、单脉冲测角处理、测距处理(简化处理)等数字阵列雷达(DAR)的核心处理流程,参见DARCoreProcess.m函数。 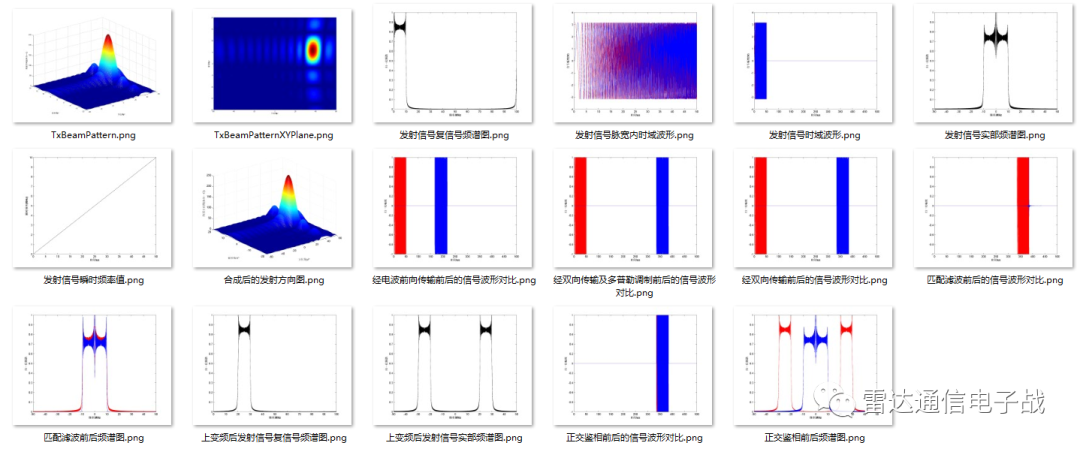
13,完成了数字阵列雷达核心处理流程与阵元级相控阵天线模型的紧密融合。
14,在多目标环境中,实现了数字阵列雷达的全流程任务仿真,对二维波束电扫模式进行直观展示,通过P显、一次/二次信息完整地展示了多功能相控阵雷达的工作流程,并记录了过程中的关键数据,可为后续开展雷达系统效能评估奠定基础,参见DARSimMain.m测试案例。
审核编辑:刘清
-
晶振对多功能相控阵雷达仿真系统的影响2025-06-11 1070
-
相控阵雷达电源芯片详解2024-11-17 9707
-
相控阵雷达的原理和分类 相控阵雷达的特点2024-04-10 11363
-
如何进行相控阵雷达导引头收发系统的设计2019-03-21 2619
-
【RSP1多普勒雷达传感器申请】车载相控阵防撞雷达系统2016-01-11 2695
-
【OK210申请】相控阵雷达系统2015-07-06 1314
-
相控阵雷达数据处理及其仿真技术2012-10-17 13958
-
相控阵雷达接收技术2012-05-28 7406
-
基于Matlab的雷达系统仿真设计2010-10-15 3782
-
相控阵雷达系统并行仿真2009-12-16 914
-
同步控制的大功率机载相控阵雷达电源设计2009-12-10 4075
-
相控阵雷达波控系统研究2009-09-14 837
-
VxWorks操作系统在多功能相控阵雷达中的应用2009-03-25 511
全部0条评论

快来发表一下你的评论吧 !
