

灵活、以数据为中心的无人机平台简化了任务适应
描述
由于无人驾驶飞行器(UAV)总是为特定任务而设计的,因此一旦建造和部署,它们往往难以适应任务的变化。构建易于适应不同任务参数的无人机需要一种新的无人机架构平台方法。最大的优势是在运营阶段显著节省了成本、复杂性和时间。
构建无人机平台的部分技术挑战是提供支持这种方法的集成框架。这种集成框架可以通过使用中间件来实现,以从无人机的各个组件中抽象出点对点数据传输的细节。这种类型的中间件已被创建为实时系统数据分发服务(DDS),这是由对象管理组(OMG)发布的标准,目前用于无人机和地面站的实现。
将无人机用于各种国防和商业目的的动力日益增长,暴露了传统设计策略的弱点和局限性。由于无人机总是为特定任务而设计的,因此一旦建造和部署,它们往往难以适应任务的变化。一套新的任务配置文件需要设计另一架无人机。因此,随着时间的推移,制造商和用户组织必须维护多个无人机系统的生产和支持线,所有这些系统都具有通用架构,但需要不同的性能,连接性或数据特征。
理想情况下,两到三个无人机设计可以作为平台,可以很容易地适应各种不同的任务。这些平台将通过其物理特性(例如发电厂,机身和燃料容量)进行区分,并具有互补的硬件和软件。为了实现任务灵活性,组件应在平台上可现场更换和热插拔,而不会造成中断。软件基础结构应提供自动发现和配置,以便可以在实时系统上动态添加和删除组件,并立即识别并与系统集成。此外,节点应该能够在发生故障后随时重新启动,并且应用程序应该能够以任何顺序启动。
从概念上讲,这个想法很容易理解,但从技术上讲,使用当前的设计原则无法轻松实现。如今,每种车辆设计都需要一个专用的地面站,该地面站集成良好但价格昂贵。无人机飞行软件通常针对每辆新车辆重新设计,有时甚至针对同一车辆上的不同任务或有效载荷进行重新设计。建造一种能够适应不同任务参数的无人机似乎并不可行。
相反,它需要一个新的系统设计和实现架构 - 一个既能提供功能又能灵活地承担多个角色和任务的架构,而无需返回绘图板进行大量修改。将此视为无人机设计的“平台方法”。就其本身而言,无人机平台并不是任何单一任务配置文件的专家。当配置适当的硬件和软件时,少量的无人机平台可能能够有效地为各种不同的任务提供服务,而DDS中间件是这个多任务框架的关键。
可配置的无人机平台降低了复杂性
可配置无人机平台在完成多项任务方面的成功有可能影响整个无人机产品生命周期。设计和实现可能不那么复杂,因为该平台在概念上和技术上都更简单。设计参数会改变,因为需要支持范围更广的任务,但总体上应该变得不那么复杂。
最大的优势很可能在生命周期的运营阶段看到。首先,需要支持的无人机型号将减少 - 也许是两个或三个平台,而不是十几个或更多不同的型号。这使得配置更简单、更便宜,库存管理变得不那么复杂。但最终它降低了支持的复杂性和成本,因为一个地面站可以为平台提供服务,而不需要为每个单独的无人机模型提供单独的地面配置。由于无人机平台本身没有为任何特定任务配置文件配备,因此可能需要更多的组件和技术支持才能将无人机平台重新配置为特定的角色和任务。然而,这将被支持和配置更少的无人机模型以及设计和实现架构上更简单的无人机平台所获得的优势所抵消。
集成框架连接解决了挑战
达到无人机设计可以作为多任务平台的程度是一项重大的技术挑战。这一挑战的很大一部分是提供支持这一概念的集成框架。如今,无人机的实施是由仪器、数据采集设备、控制表面和地面控制站之间的专用硬连线连接驱动的。虽然此配置可以保证需要数据进行实时响应的组件之间的数据可用性,但当存在多个互连时,它变得复杂。
此外,硬连线配置具有很强的抗更改性。例如,如果将来由于新的仪器,子系统或传感器而增加带宽要求,则可能无法在该无人机上获得所需的性能或可用性保证。事实上,这是无人机倾向于针对特定任务的原因之一。
相反,真正的平台可以容纳所有可能的数据源和消费者之间的完全互连。乍一看,这可能非常复杂,因为没有先入为主的数据路径,网络带宽或时间确定性概念。即使可以设计和构建这样的配置,似乎也不能保证可用带宽能够满足任何给定仪器组合的实际性能和实时要求。
平台还需要能够为任何可能的配置提供必要的带宽、性能和保证。当然,为了实现这一点,总有一些情况需要权衡取舍,但例如,对于多特派团一体化框架来说,性能、可靠性和实时确定性之间的技术权衡应该既是可能的,也是合理的。
通过 DDS 实现以数据为中心的体系结构
这种集成框架可以通过使用软件层或中间件来实现,该软件层或中间件将点对点数据传输的细节从无人机的各个组件中抽象出来。通过这样做,该中间件可以提供轻松添加新硬件和应用程序的能力,使用多个可用路由使数据可用以确保实时可用性,支持多种传输协议,并提供针对特定配置和任务的调整。
这种类型的软件层已创建为实时系统的数据分发服务,这是由对象管理组发布的标准。数据分发服务使用发布-订阅通信模型使数据创建者能够将数据发布到基础结构,并允许数据使用者订阅来自此数据基础结构的数据。DDS 发布-订阅模型自动将信息生产者(发布者)与信息消费者(订阅者)连接起来。通信在空间(节点可以在任何地方)、时间(交付可能在发布后立即或稍后)和流程(交付可以可靠地进行,调整到可用带宽)中解耦。
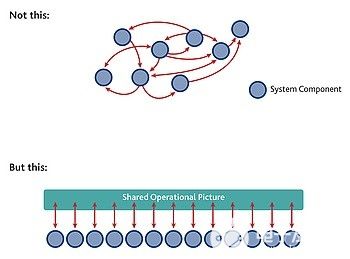
在 DDS 实现中,数据从物理源和目标中抽象出来,并可供订阅它的任何应用程序访问,而与源的位置和传输数据的特定链路技术无关(图 1)。由于 DDS 耦合是松散且匿名的,因此可以在运行时定义、创建和销毁通信路径。此外,DDS实现会自动“发现”请求发布者和订阅者,在运行时在它们之间建立连接,而无需以前的配置。DDS 还支持整个网络容错所需的数据弹性。
图 1
此外,在考虑我们的多任务无人机平台时,DDS标准定义了一套全面的服务质量(QoS)参数。由于可能存在设计权衡,工程师可以在性能、可靠性、确定性和其他影响系统执行其任务能力的因素之间配置平衡。DDS QoS 参数指定组件与整个模型的属性以及数据传输本身之间的耦合程度。
DDS 包括可靠性、持久性、截止日期、优先级和数据所有权等 QoS 参数。通过调整QoS参数,系统和应用软件开发人员将能够确保数据传输和接收满足每个系统和应用的独特需求。可以在运行时更改 QoS 参数设置,支持特定任务的重新配置,而无需重新构建应用软件。丰富的 QoS 参数集使得在各种处理器和网络(包括嵌入式处理器和网络)上实现 DDS 成为可能。
DDS 从根本上说是设计用于不可靠的传输,例如 UDP 或无线网络。任何设施都不需要中央服务器或特殊节点。所有通信(包括发现)都是严格对等的,并且可以选择采用多播来提高效率和可扩展性。
示例:以数据为中心的集成基础
考虑一个使用DDS实现设计的无人机,作为支持大部分可互换硬件和应用程序的软件集成平台。将DDS中间件作为数据通信的基础,可以为实际有效负载提供极大的灵活性。它可以专注于传感器和数据记录仪器,确保连续的数据流可用于记录和分析数据。或者,它可以专注于实时通信,确保可靠和确定地交换进出地面站的遥测数据。创建平台后,工程师可以仔细查看 QoS 权衡,以确保满足系统数据可用性要求。可以在运行时更改 QoS 设置,以满足特定的任务要求。
无人机设计中的新兴用途
DDS目前用于无人机和地面站的实施。例如,DDS中间件是通用原子高级驾驶舱地面控制站(GCS)的基础。GCS网络系统集成了控制和信息显示,合成视频和融合的态势感知数据。
DDS中间件构成了该站的软件通信骨干。DDS 发布-订阅架构简化了通信的系统集成。例如,任何系统组件都可以订阅传入的飞机遥测流,例如纬度和经度、俯仰、滚动和空速参数。例如,它还允许用户连接多个工作站,允许一个站点的飞行员与另一个站点的传感器操作员密切合作。
作为另一个例子,原位扫描鹰长航时无人机在车辆本身和地面控制站中使用DDS(图2)。在机身上,DDS连接飞行计算机,传感器和机载应用计算机。在地面站内,DDS连接解码数据馈送的系统,分析无人机的情况,并与操作员控制接口。DDS实现了具有良好控制数据流的分层控制网络。例如,这使得Insitu能够在多个地面站之间无缝切换控制,并通过不可靠的低带宽链路可靠地连接到飞机。
图 2

DDS QoS的可配置性也使其非常适合有损网络,例如车辆和地面站之间的无线连接可能遇到的网络。
当然,DDS并不能解决围绕实施灵活无人机平台的所有挑战。设备和有效载荷重量、空气动力学平衡、成本和功耗等因素将驱动不同的无人机平台,即使采用灵活且响应迅速的集成模型也是如此。但鉴于DDS标准在抽象和管理实时数据流方面的功能,它可以为构建多用途无人机平台提供基本方法。
审核编辑:郭婷
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 4700
-
实测CS创世SD NAND:无人机飞控数据存储的\'救命稻草\',掉电不丢数据是什么体验?2026-06-04 303
-
无人机电子电路设计图最新集锦2015-04-24 5772
-
【OK210申请】无人机安卓版地面控制中心2015-07-11 1636
-
“中发智造”无人机展在京开幕 无人机试飞成最大亮点2015-12-06 3513
-
无人机遥感技术2016-03-11 8164
-
无人机有人管了 全国首个无人机飞行服务中心试运行2016-06-01 3345
-
无人机培训2017-02-13 4254
-
无人机中的MCU是如何工作的?2018-10-09 2724
-
无人机基本知识大攻略2018-10-12 3903
-
无人机流行和快速增长背后,对无人机开发平台了解多少?2019-02-21 4981
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3823
-
国际无人机的新闻2020-05-12 2085
-
航模/无人机遥控的解决方案2020-07-03 3475
-
仿生无人机能增强无人机的环境适应性 是未来无人机研发的重要方向2019-11-25 2333
全部0条评论

快来发表一下你的评论吧 !
