

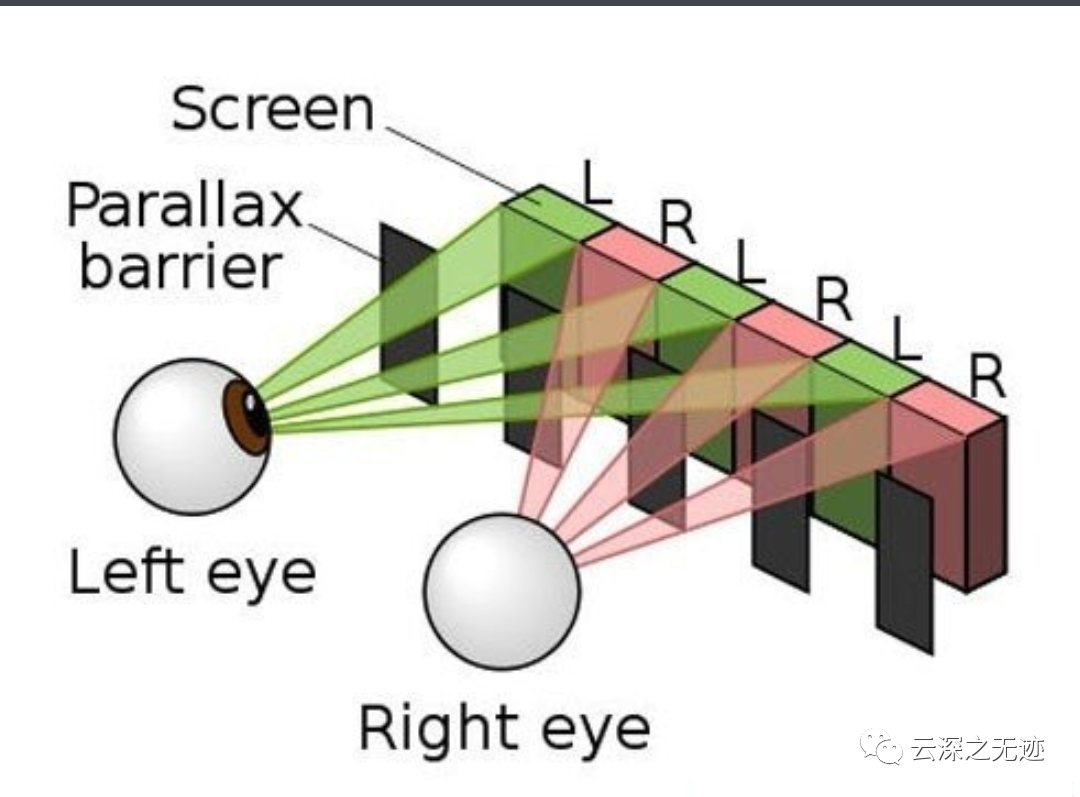
双目立体视觉技术原理 现在深度相机的技术路线
人工智能
描述
这里简单的对相机原理一个梳理,因为过了一年了,我的能力也有一些增长。写的东西比去年肯定是更加的深入。
Gemini(双子座),我去年的相机就是这个
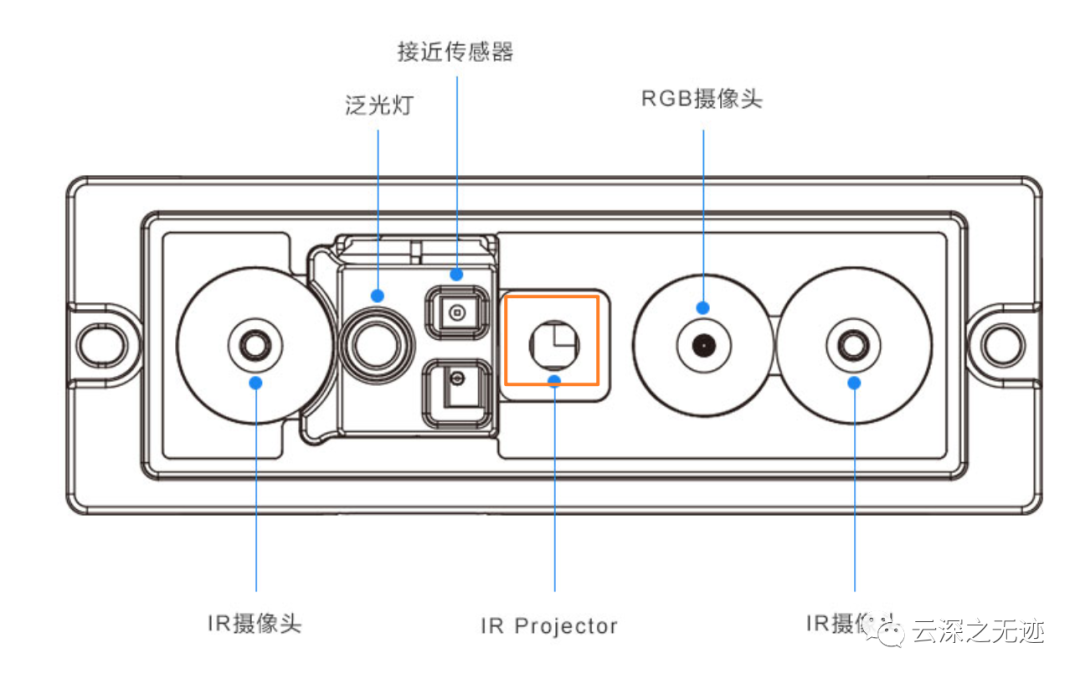
泛光灯,英文名称:Floodlight 泛光灯是一种可以向四面八方均匀照射的点光源,它的照射范围可以任意调整,在场景中表现为一个正八面体的图标。
泛光灯不是聚光灯、投射灯、射灯。泛光灯制造出的是高度漫射的、无方向的光而非轮廓清晰的光束,因而产生的阴影柔和而透明,用于物体照明时,照明减弱的速度比用聚光灯照明时慢得多,甚至有些照明减弱非常慢的泛光灯,看上去像是一个不产生阴影的光源。而聚光灯投射出定向的、边界清楚的光束,照亮一个特定的区域。

因为在相机上面看见了这个东西,这里就写一下这个灯是什么
深度信息
RGB
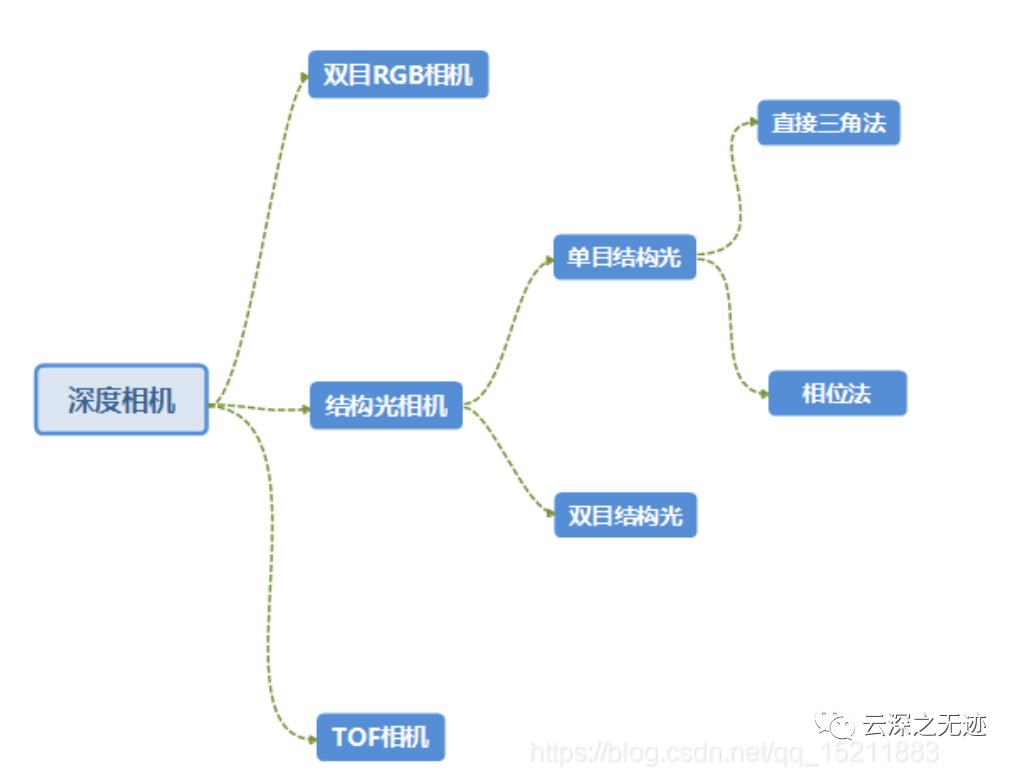
现在深度相机的技术路线
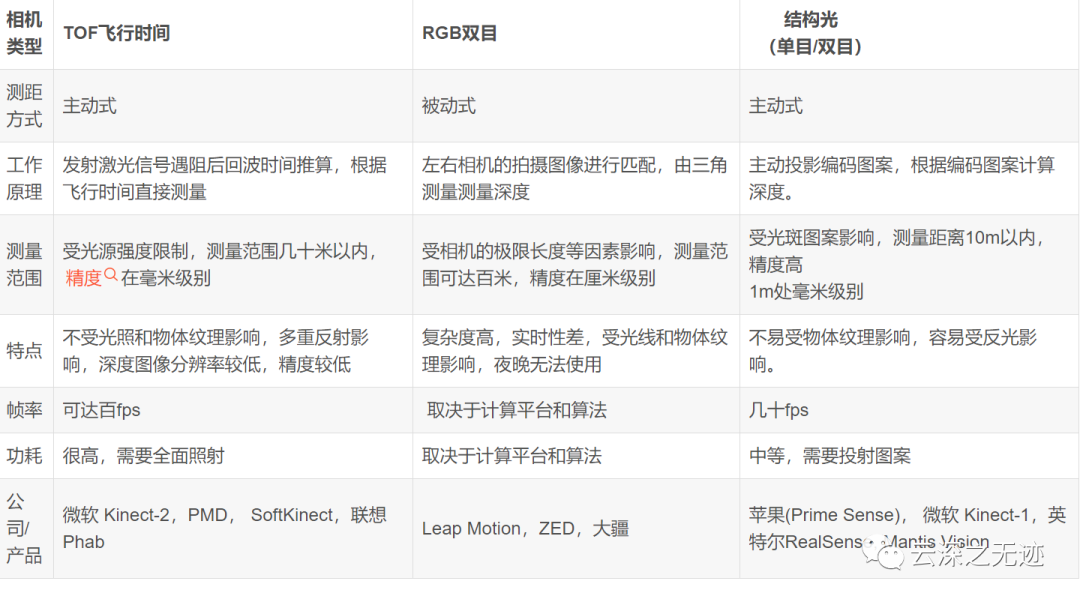
Gemini是后面的结构光双目方案
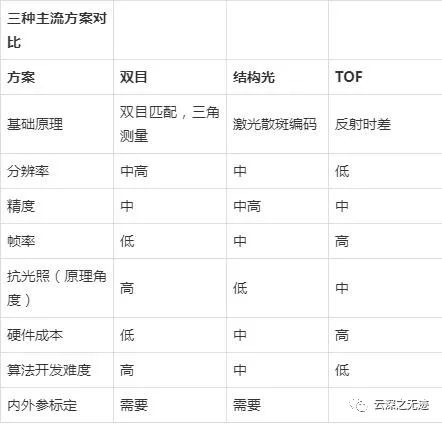
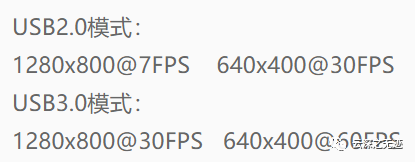
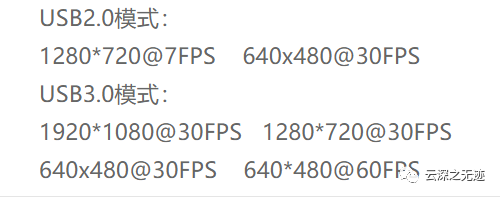
另外一个选型的列表

结合着看,和上面互相补充
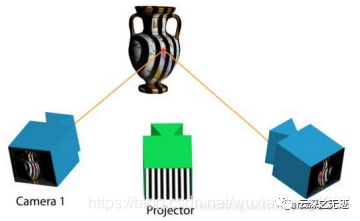
看相机的布置的结构
双目结构光实现:结合立体视觉极线约束确定左右相机的对应性关系;最后,根据预先标定好的系统参数通过三角测量法计算三维坐标。

这个是深度相机的一个应用,现在也可以做方案的参考
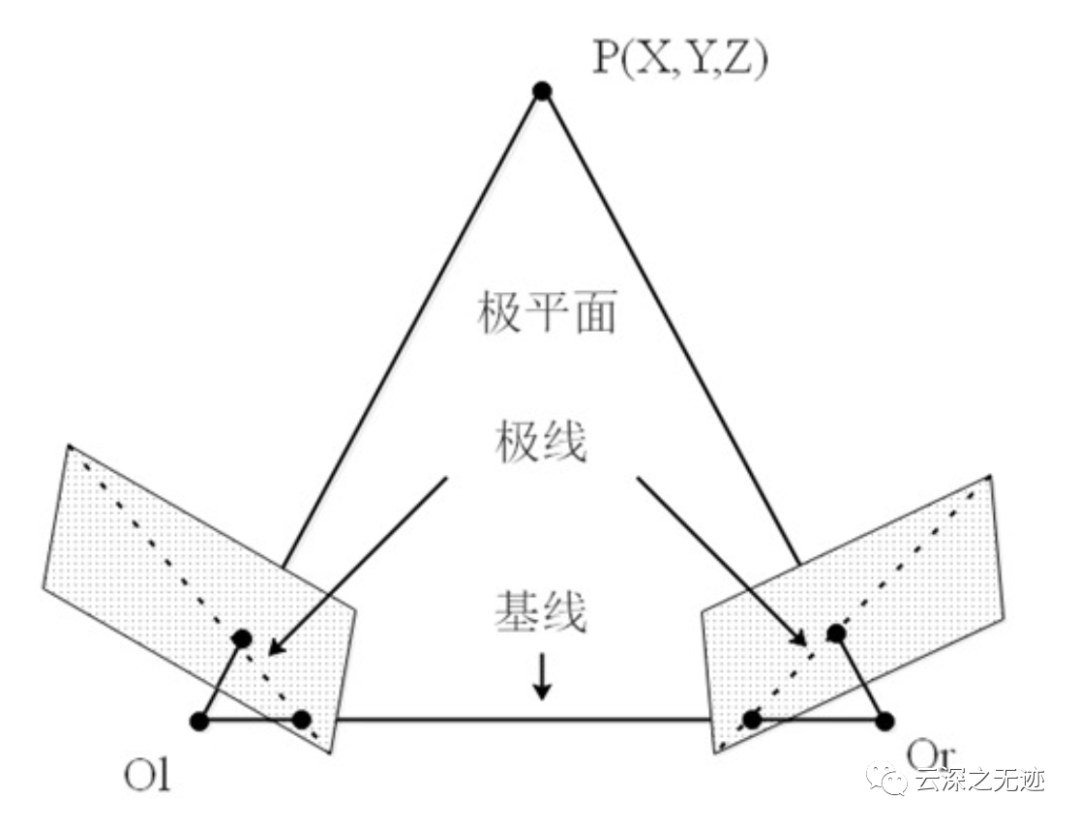
原理图
“双目立体视觉”,简单而言就是利用不同位置的两台相机取得同一场景的两幅视差图像,然后通过某种方法确定物体上一点在对应两幅图片中的位置,从而得到该点的三维坐标信息(具体的数学推导在另一篇博文中补充),从而得到整个物体的三维点云模型。 “编码结构光”就是用来确定物体上一点在对应两幅图片中的位置的某种方法,我使用的是格雷码编码的结构光,通过将格雷码编码图案投影到物体表面,可以将物体表面上每一个点(准确来说应该是每一个子区域)都赋予一个独一无二的码值,即特征值。通过搜索这个特征值,我们就不难在两幅图片中找到对应的点了。
这个几个视差的示意图

这个OrbbecSDK我看了一下,感觉不错,但是我的相机用不了

就是支持这个相机而已
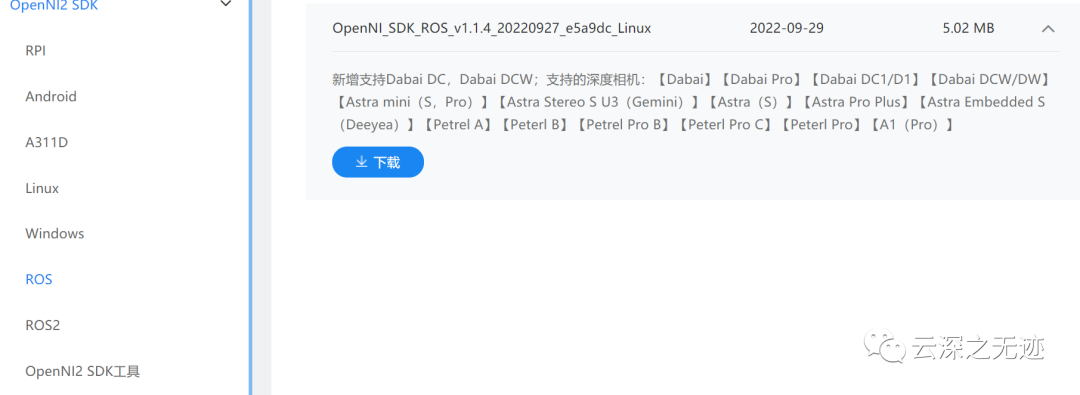
只能看OpniNi2了
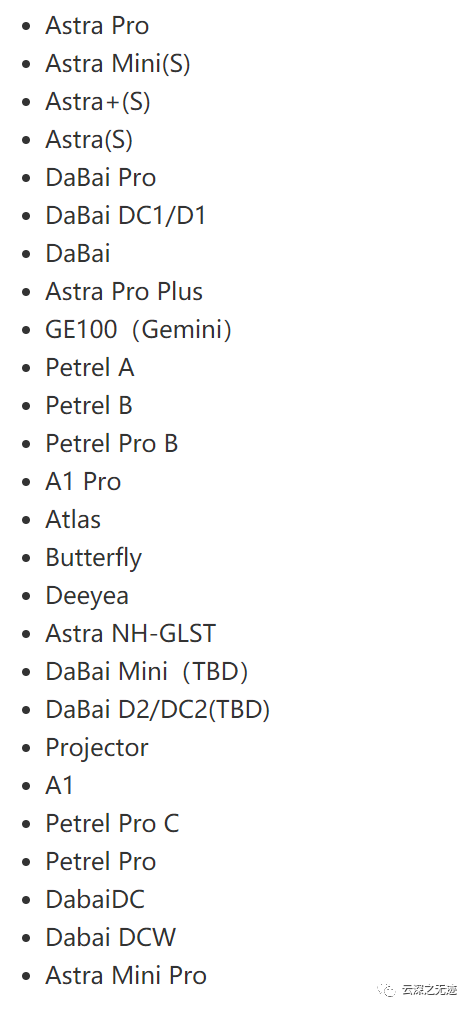
几乎就是全系了
回忆完事了,原来是噩梦。。。
https://github.com/Quori-ROS/quori_ros
http://wiki.ros.org/astra_camera/
https://developer.orbbec.com.cn/download.html?id=181
https://developer.orbbec.com.cn/download.html?id=75
https://baike.baidu.com/item/%E5%8F%8C%E5%AD%90%E5%BA%A7/23549?fromtitle=Gemini&fromid=1191309&fr=aladdin
https://baike.baidu.com/pic/%E8%A7%86%E5%B7%AE/4160990/1/ae51f3deb48f8c5467726bdf3f292df5e1fe7f99?fr=lemma&fromModule=lemma_top-image&ct=single#aid=1&pic=ae51f3deb48f8c5467726bdf3f292df5e1fe7f99
https://blog.csdn.net/u010783226/article/details/113877052
http://www.bu-laser.com/news/135.html
https://www.cnblogs.com/Howne/p/11229672.html
https://blog.csdn.net/wuxianfeng1987/article/details/115353522
编辑:黄飞
-
RTK-SCAM-60 双目立体视觉相机|精准深度感知 全场景智能视觉2026-03-27 250
-
双目立体视觉相机产品介绍2026-02-28 345
-
关于双目立体视觉的三大基本算法及发展现状2023-08-25 3594
-
双目立体视觉原理 HALCON的双目视觉系统研究2023-07-19 1267
-
双目立体视觉的定义与理解2022-10-31 5342
-
双目立体视觉深度测量步骤介绍2022-06-14 3995
-
双目立体视觉在嵌入式中有何应用2021-12-23 1877
-
双相机立体视觉和结构光立体视觉原理及优势对比2019-05-14 9126
-
基于双目立体视觉的桥梁裂缝测量2018-01-16 1444
-
LABVIEW能做双目立体视觉吗2018-01-13 10135
-
双目立体视觉的运用2016-03-03 5515
-
基于立体视觉的变形测量2015-09-21 4733
-
双目立体视觉原理大揭秘(一)2013-11-21 3303
-
基于HALCON的双目立体视觉系统实现2011-04-08 1910
全部0条评论

快来发表一下你的评论吧 !
