

安全FPGA技术实现无人机通信和控制
描述
单芯片加密技术可在单个 FPGA 中经济高效地实现 UAV 命令和控制系统。可编程 IC 中的部分重新配置功能可节省 SWaP-C 成本,因为密度较低、功耗较低的 FPGA 可以托管设计。
在过去几年中,美国军方及其盟国越来越依赖无人机(UAV)系统在世界各地执行监视和战斗任务。安全通信链路对于无人机的运行至关重要,既可以基于任务目标控制无人机,也可以可靠地向地面上的任务控制器提供可操作的数据。加密和解密是固有的要求,增加了无人机电子封装的复杂性和成本。但是,通过能够满足类型 1 加密要求的单个 FPGA,设计团队可以利用可重新编程性并实现尺寸、重量、功耗和成本的节省,这称为 SWaP-C 节省。赛灵思和先进通信概念公司 (ACCI) 展示了一种基于 FPGA 的无人机通信和控制系统。
无人机应用依赖于在FPGA中实现的单芯片加密(SCC)设计来保护地面控制站和无人机之间的通信。该实现完全保护了遥测、视频和控制数据。该示例系统依靠FPGA部分重新配置的强大功能,在可现场升级的解决方案中提供算法交换,所有这些都在较小的产品占位面积内完成。
Xilinx 与领先的国防解决方案开发商和主要政府机构合作,开发了 FPGA 设计流程和验证流程,使单个 FPGA 能够满足 1 类加密要求。满足1类加密要求的旧方法采用了两个FPGA,一个用于安全地对设计的未加密部分进行分区。在单芯片实现中,未使用的逻辑元素用于实现分区。
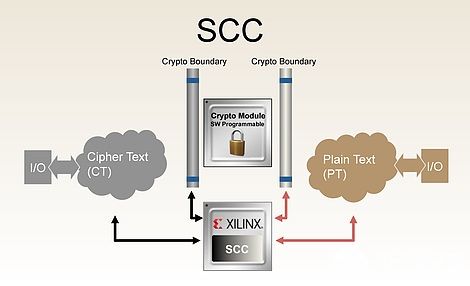
设计流程隔离了 FPGA 中处理红色和黑色数据以及加密/解密功能的区域(图 1)。设计的红色部分处理未加密的数据,并且必须与处理加密数据的部分隔离。SCC在功能上位于红色和黑色两侧之间。这里描述的无人机示例基于使用 SCC 技术的 Virtex-5 FPGA。
图 1:类型 1 加密要求在 UAV 系统的加密(黑色)和未加密(红色)区域之间进行隔离。

无人机演示
在 MILCOM、Xilinx 和 ACCI 等会议上,赛灵思和 ACCI 展示了一款配备 FPGA 的无人机,可在无人机和加固型、基于笔记本电脑的地面控制站之间提供实时加密的控制、遥测和视频数据流(图 2)。真人版曾在空军联合强行进入演习(JFEX)和SOCOM / NPS战术网络拓扑(TNT)演习等活动中飞行。它们正在评估用于各种飞机和系统,包括无人机。
图 2:ACCI无人机展示了单芯片加密和部分重配置的强大功能。
无人机指挥和控制系统使用带有集成电源处理器的 Virtex-5 FPGA。该系统只需要FPGA、MEMS加速度计和用于无线通信链路的物理层。在开发该系统时,ACCI 从 SCC 设计流程和 Xilinx 的信息保障技术入手,并添加了一个名为“战术上牢不可破的安全通信”或 TUCNet 的安全通信层。图克网络可以加密任何数字数据流。例如,它可以处理视频、遥测、控制甚至语音数据包。
出于安全和竞争原因,ACCI不会透露TUCNet的技术细节。但更广泛地说,该公司依靠协议跳跃和加密方案跳跃等功能来提供在任何类型的有线或无线网络上安全的网络层。
为了满足1型要求,ACCI必须根据国防机构的规范隔离FPGA的每个区域。利用 Xilinx 的 SCC 方法以及隔离验证工具 (IVT),ACCI 能够实施该解决方案,并提供验证隔离的必要文档。
最值得注意的是,ACCI在单个FPGA中实现了类型1要求。在 Xilinx 与政府机构合作并验证 Type 1 加密功能之前,设计需要使用多个 IC 或子系统来隔离红色和黑色数据以及在每个数据上运行的算法。SCC 技术简化了系统实施,从而节省了 SWaP-C 的成本。至少,SCC技术从实现中消除了一个FPGA,使托管设计所需的PC板空间减半。功耗和成本不会减半,因为双芯片实现可能使用了密度稍低的FPGA,但节省的成本是显着的,甚至重量也减轻了一小部分。
强化了软件支持功能的优势
在满足1类加密认证的所有安全要求的同时,ACCI的FPGA算法和处理实现通过使用动态部分重新配置,加剧了无人机应用中的SWaP-C优势。Xilinx 在 1 类加密系统上所做的工作证明了即使在动态重新配置部分 FPGA 时,也能保持红黑数据的适当隔离。通过动态部分重新配置,FPGA不必足够大来容纳所有处理算法。它只需要足够大,就可以同时容纳单个最大的数据处理算法、主控制算法和SCC实现。
ACCI利用独特的动态部分重新配置来增加无人机控制和通信系统的功能,并最大限度地减少这样做的SWaP-C负担。该系统具有专有的硬件操作系统(硬件操作系统),该系统在FPGA中是静态的。HardwareOS 提供系统资源分配和系统服务功能,这些功能是操作系统在传统的基于软件的系统体系结构中提供的。
无人机系统依赖于ACCI开发的应用程序或算法加速器库。除了安全功能外,支持 TUC 的算法加速器还支持无人机上的遥测和视频数据流的实时操作以及数据转码功能。例如,如果 UAV 处于倾斜转弯状态,则视频帧会因 UAV 帧的俯仰角和滚动角度以及摄像机平移和倾斜设置而水平失真。这个问题是通过动态加载和运行算法来实时“反向旋转”视频帧到正确的方向来解决的。
TUC系统还将数字视频从RS-170格式转码为MPEG-2和H.264格式等。然后,系统将转码后的视频与来自自动驾驶仪和其他机载传感器的遥测数据组合到 MPEG 传输流中,该传输流可正确模拟 Predator 数据下载格式。这允许当前处理捕食者格式数据流的任何系统使用无人机数据。所有数据流都经过加密,以便进行地面传输。
系统可以将传输到无人机的每个数据包或捕获的遥测或视频数据的每个数据包加载到FPGA上的静态块RAM(BRAM)中,然后根据需要将任何所需的算法序列动态应用于每个数据包。借助 TUC 硬件加速,视频稳定、水平校正、Predator 格式转码、传输流打包和加密的整个帧处理可在不到 12 毫秒的时间内完成。从相机到每秒30帧的速度,帧之间有33毫秒可用,从而为未来计划的增强功能提供了充足的处理资源,例如自动目标跟踪和直接自动驾驶仪控制。
动态部分重新配置
虽然使用SCC流来帮助维持类型1的要求,但使用动态部分重新配置的真正优势是显而易见的:系统每秒可以重新配置FPGA超过100,000次。此外,FPGA架构中固有的数据流和并行处理可最大限度地减少延迟,并实现实时操作,以优化收集的数据以传输到地面站。ACCI系统对预处理的数据进行加密,并将安全数据传输到地面控制站。演示中使用的笔记本电脑解密数据并将其呈现给用户。
部分重新配置功能允许 ACCI 利用集成了 PowerPC 的最小、坚固耐用的国防级 Virtex-5 系列成员,从而节省了更多成本。所选的 XQ5VFX70T 器件包括 11,200 个可配置逻辑模块 (CLB) 和一个电源控制核心。在没有部分重新配置的情况下,该设计需要更大的FPGA,这将花费更多成本并使用更多功率。例如,这可能意味着在Virtex-5Q系列中较小的产品和下一个较大的产品之间,静态静态功耗可节省5倍。
ACCI 和 Xilinx 正在开发新版本的无人机演示系统,该系统将利用国防级 Virtex-6 系列,并进一步增强 SWaP-C 的优势。与具有类似数量 CFB 的 Virtex-5 FPGA 相比,Virtex-6 FPGA 的功耗降低了 50%。此外,Virtex-6 系列采用 45 nm 工艺技术制造,而 Virtex-5 系列采用 65 nm 工艺制造。新版本的无人机系统不需要具有集成PowerPC硬核的FPGA,而是通过使用软核MicroBlaze处理器来进一步节省成本。
审核编辑:郭婷
-
第一集 知语科技无人机反制技术与应用--无人机的定义与分类2024-03-12 4717
-
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!2024-02-27 8755
-
无人机反制设备的原理是什么?2022-09-13 11766
-
反无人机技术的研发,无人机反制设备成为热门产品2022-09-08 28962
-
各类反无人机技术的优势2022-08-25 28013
-
无人机反制市场分析2022-08-23 6950
-
无人机探测技术2020-07-29 2964
-
5G技术下,无人机将有多强大?2019-08-15 2067
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3833
-
无人机技术解答2017-11-15 29085
-
无人机遥感技术2016-03-11 8180
-
【云智易申请】智能无人机通信2015-08-07 2958
全部0条评论

快来发表一下你的评论吧 !
