

如何使用Vivado 2022.1版本工具链实现ZCU102 USB启动(上)
描述
本文作者:赛灵思工程师 Zhao Gaofeng
本文依据 Vivado 2022.1 版本工具链的特性,对 UG1209( 最新版本为 2020.1 )中介绍的 USB BOOT 启动步骤做了修改,此外,介绍了 WINDOWS 10 中 DFU 工具的使用。
Step1 VIVADO 操作:
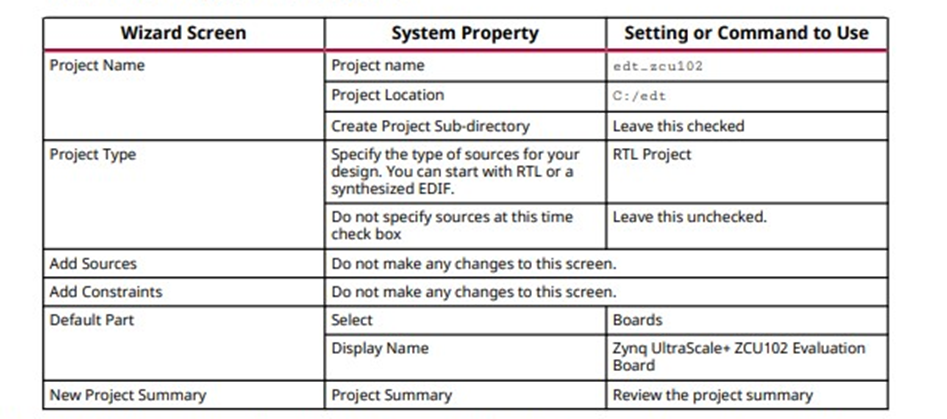
新建 VIVADO 工程 。
( 图片截自 UG1209,路径和工程名可自定,下同 )
新建 Block Design。

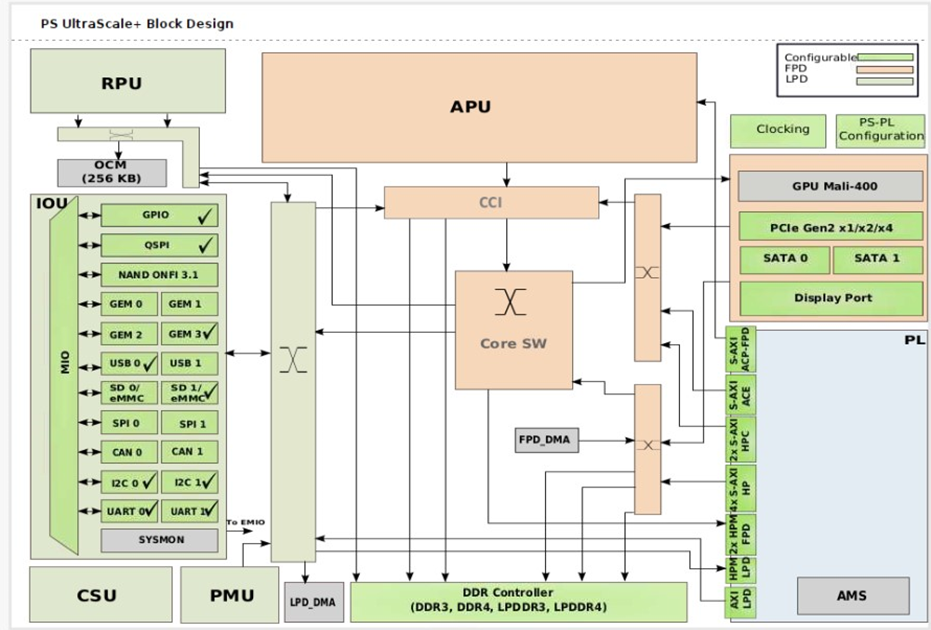
添加 Zynq UltraScale+ MPSoC IP,并使用 run block automation 应用 board preset。
需要注意的是,要在 board preset 的基础上减少外设的使用以防启动镜像过大,原因会在镜像制作阶段说明。这里去掉了 PCIE、SATA、DP、CAN 外设以及两个 AXI HPM FPD 接口。

完成配置后,依次进行 Validate Design, Create HDL wrapper, Generate Output Product (OOC) , Export Hardware。因为这里没有用到PL端,所以不用生成比特流。
Step 2 制作第一个启动镜像:
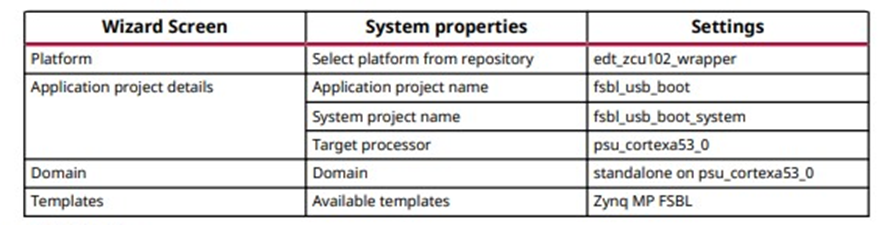
创建 FSBL 工程。
配置 FSBL,在 src 目录下找到 xfsbl_config.h,修改其中的宏定义如下:

修改完成后保存、编译。
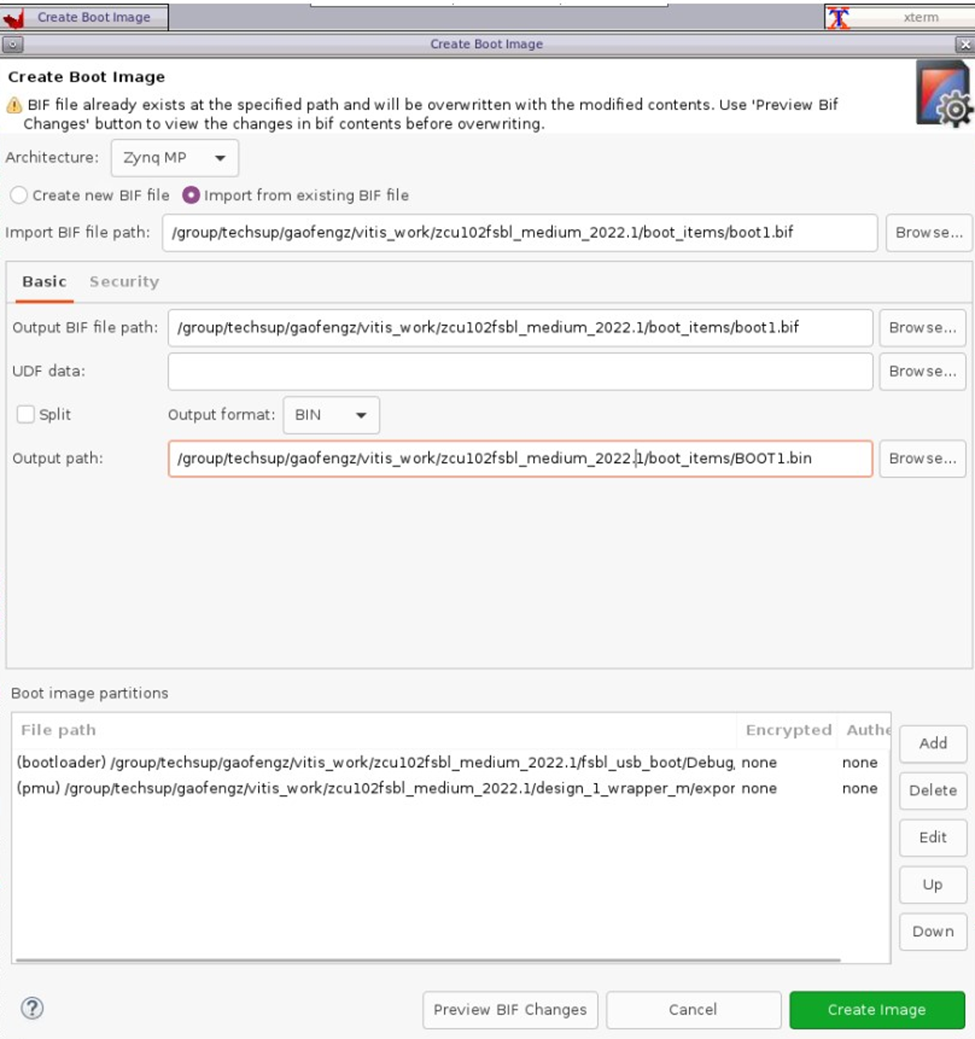
打包 fsbl.elf 和 pmufw.elf,USB boot 的第一个启动镜像会被加载到 256KB OCM 中,为了满足 size 要求,第一个启动镜像只包含 fsbl.elf 和 pmufw.elf,如果使能过多外设会导致最终的 pmufw 过大。当 OCM 被写满时,USB 启动就会失败。打包方式如下图所示,注意 pwufw 的 partition type 要指定为 pmu(loaded by bootrom)。
Step 3 制作第二个启动镜像:
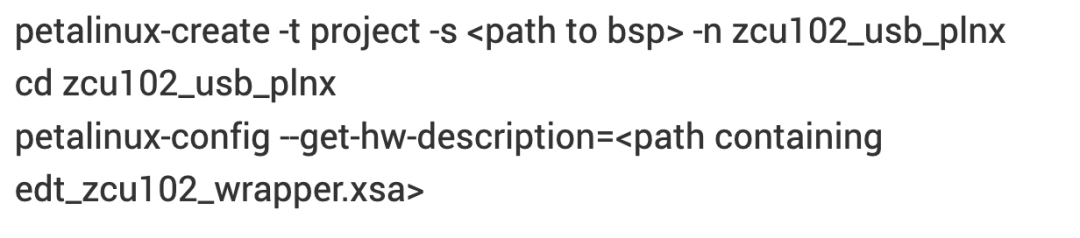
使用 Vivado 2022.1 版本的 ZCU102 BSP 创建 PETALINUX 2022.1 工程。
配置 PETALINUX 工程:
1.选中 Subsystem AUTO Hardware Settings, 选中 Memory Settings ,设置 System Memory Size 为 0x6FFFFFFF。
2.返回主菜单. 选择 Image Packaging Configuration, 设置 root file system type 为 INITRAMFS。
3.将 INITRAMFS/INITRD Image name 由默认的 petalinux-intramfs-image 为 petalinux-image-minimal,默认配置下ROOTFS 会放在 SD 卡的 EXT4 分区,这是 PETALINUX 2021.1之后版本的新特性,修改后 ROOTFS 在 DDR 中,就无需插 SD卡了。
4.返回主菜单,选择 ARM Trusted Firmware Configuration,配置如下:
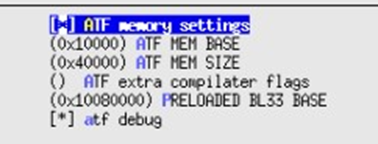
默认情况下,ATF 运行在 COM 中,但是在本设计中 OCM 的空间非常紧张,ATF 在 OCM 运行可能会因为内存不足卡死,所以改为在 DDR 中运行,同时使能 atf debug 方便调试。
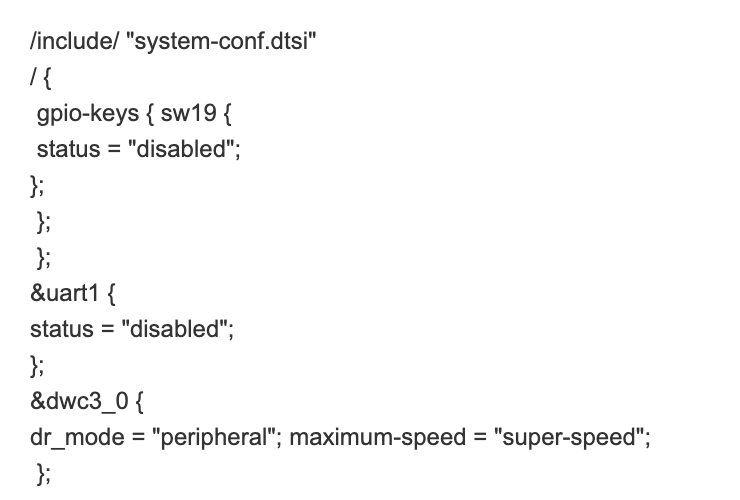
5.修改设备树:
编辑 ./project-spec/meta-user/recipes-bsp/device-tr ee/ files/system-user.dtsi 如下:
6.编译: petalinux-build
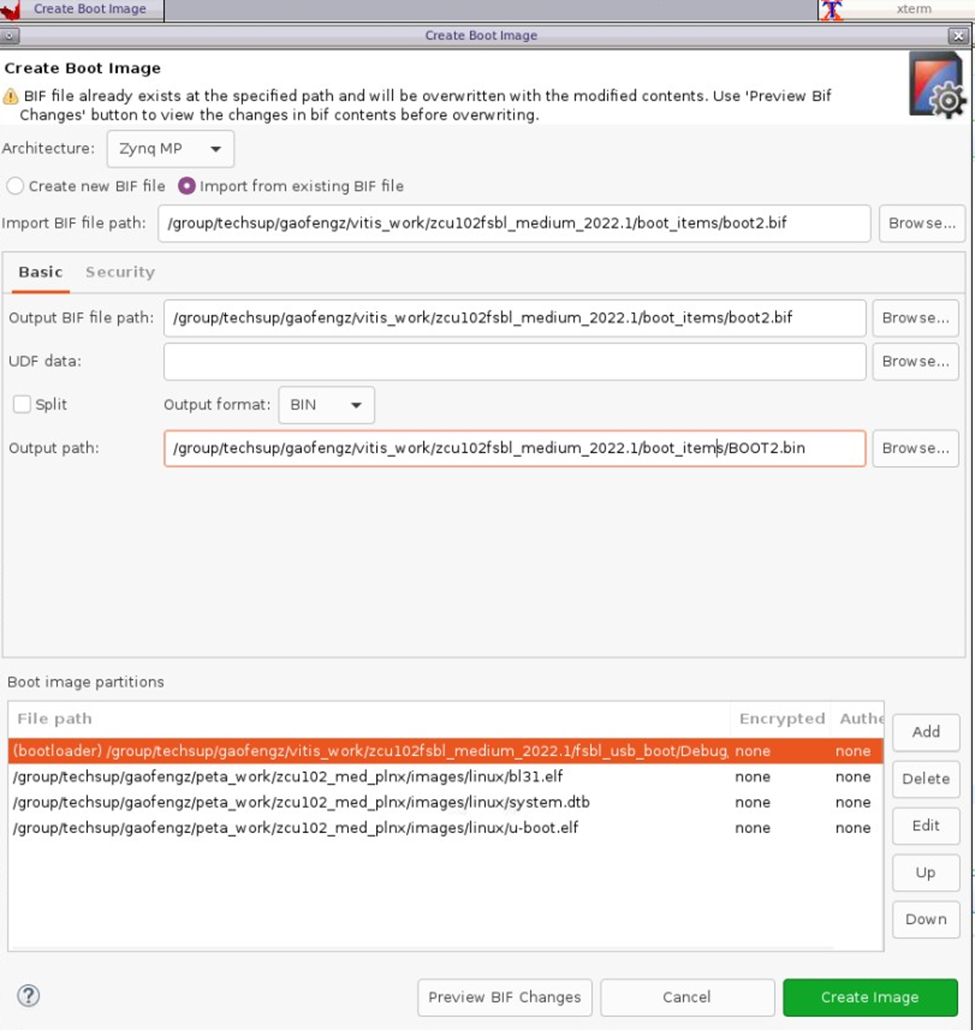
回到 Vitis IDE 制作启动镜像,如下图所示,注意 bl31.elf 的excpetion level=el3 并且使能 trust zone,system.dtb 的 load属性设为 0x00100000(在2021.1后u-boot.elf 不再包含system.dtb),u-boot.elf 的 exception level=el2。

详细的测试过程,请参考“如何使用 Vivado 2022.1 版本工具链实现 ZCU102 USB 启动(下)”
审核编辑:汤梓红
-
AD9361与ZCU102开发板能否配合使用2026-05-29 85
-
vivado2017中找不到ZCU102对应的板卡,求解决和分享,应该如何解决2024-02-29 5832
-
zcu102和zcu104有什么区别2024-01-04 6417
-
如何使用ZCU102评估板来运行应用2021-12-23 1533
-
PYNQ移植ZCU102详细流程分析2020-12-23 5693
-
ZCU102评估板提供设计文件吗?2020-05-12 4061
-
如何为zcu102生成PSU Init文件?2020-05-06 3265
-
在ZCU102 ultrascale上找不到串口2019-10-22 3889
-
请问是否有针对zcu102板/平台的固件更新的参考文档?2019-10-21 1935
-
为什么在Vivado(任何版本)中没有ZCU102的板级支持?2019-10-11 4482
-
如何知道ZCU102 dxdesinger版本?2019-10-09 1781
-
ZCU102许可证凭证是否涵盖所有ZCU102版本2019-01-02 4170
-
Vivado中缺少Zcu102板但它在HLS中存在2018-12-28 5522
-
适用于板载Zynq UltraScale+ZCU102评估板的vivado版本2018-12-26 2926
全部0条评论

快来发表一下你的评论吧 !
