

烟雾环境下沥青混合料花白料的视觉识别方案
电子说
描述
摘 要
为了避免恶劣的施工环境对图像采集结果的影响,提出一种烟雾环境下的沥青混合料花白料识别方法。该方法首先对暴露在烟雾环境下的沥青混合料图像进行预处理,包括滤波、阈值分割以及一系列形态学处理。通过这些处理,该方法能够在有烟雾干扰的条件下标记沥青混合料中的花白料颗粒,并计算每个颗粒的面积,以及这些花白料颗粒在整个图像中所占的面积比例,由此判断沥青混合料是否搅拌均匀,最终有效识别烟雾环境下的沥青混合料花白料。
引言
沥青路面具备平整度高、抗震性好、噪音小、养护便捷等优点[1],其路用性能却极容易受诸多因素影响。为了对沥青路面实施预防性养护,需要对沥青混合料的材料选择、生产以及成型过程进行严格的质量控制[2-3]。花白料的存在会影响沥青混合料的质量,而使用拌合不均的混合料进行摊铺则会影响道路质量,因此必须严格管控混合料中花白料的比例。沥青和石料会由于搅拌不均匀而产生花白料,即一部分石料裹覆沥青特别多,另一部分石料并没有被沥青裹覆[4]。当沥青混凝土摊铺完成后,包裹沥青较多的位置就会出现沥青游离,在温度较高的情况下更是会出现路面发软的状况,影响道路质量[5-6]。摊铺到路面后如果出现花白料,这个位置就更容易散料,严重影响路面性能。出现这种情况时,必须马上做出相应的处理[7]。
由于传统的沥青路面材料检测方法存在诸多缺陷,国内外不少专家学者将数字图像处理技术引入沥青路面材料检测领域,对基于图像处理的沥青路面材料检测技术进行了研究与探索,并取得了一定的进展[8]。但是在实际的检测过程中,经常会因为现场施工环境恶劣,导致采集的图像受到现场烟雾的极大干扰,质量无法满足图像处理的要求。在有烟雾的情况下,由于烟雾和灰尘的遮盖,无法采集到清晰的沥青混合料图像,因此很难识别沥青混凝土花白料颗粒,无法对混合料拌合质量进行监管,最终导致路面质量差而无法继续施工。本文提出一种能够快速、实时检测识别花白料颗粒的方法,为烟雾和灰尘环境下的沥青混合料花白料检测识别提供准确可靠的技术手段,解决了沥青混合料不均匀问题,提高了沥青混合料的质量。
施工质量存在的变异性是造成路面早期破坏的关键因素之一,因此很多研究者应用图像处理中的烟雾检测对沥青路面的质量进行改善。黄梦涛等针对噪声大且低照度的图像处理方式,根据噪声点自适应来调整滤波窗口,改善了烟雾图像视觉效果差的问题,并进行仿真分析,验证了烟雾算法的去噪效果[9]。张金泉等用5种评价方法分别评价图像的去烟雾效果,证明频域滤波法与同态滤波法相结合的方法效果最优[10]。殷梦霞研究了复杂场景下的烟雾检测,应用三帧差法实现了多特征融合的烟雾检测,显著提高了烟雾检测正确率[11]。嵇晓强为了实现雾天环境下的图像增强效果,使用改进的基于修正Retinex模型,将图像的局部对比度和全局对比度相结合,优化了算法的复杂度和时间[12]。郭璠等针对图像去雾效果的2种评价方法进行了实用性和可靠性评估。一种是用环境渲染来模拟有烟雾环境下的图像,另一种是直接通过人眼的主观感知结合综合评价体系来评价图像的效果[13]。袁光权研究了沥青面层原材料质量控制对于沥青混合料路用性能、压实度、平整度变异性水平的影响,对于提高沥青路面的施工质量管理状况、施工质量、路面耐久性和建设沥青路面施工质量管理体系具有重要的指导意义[14]。
沥青混合料花白料识别系统硬件设计
拌合站的技术性能会影响沥青混合料的质量。本文在分析机器视觉系统的基础上,借鉴类似项目生产现场的经验,确定了本套图像采集系统的硬件设备。识别系统中的硬件设计系统包括补充光源器材、成像设备系统及镜头、图像数据传输控制设备、通信控制模块的设计与选型。
(1)补充光源。本系统采用浩邦智能公司生产的HB-P1016D-W型号LED闪光灯作为补充光源。在与光源匹配的条件下,结合生产现场图像采集设备安装空间小的特点,经过现场试验后决定采用前向照明的方式,即光源直射。这种照射方式具有节省空间、便于设备安装的优点。
(2)成像设备及镜头。本系统选用BASLERAca1300-60gm工业相机作为图像采集设备,镜头选用LensEdmundOpticsCFFLF1.3f8.5mm2/3″镜头。工业相机的实际安装方式如图1所示。

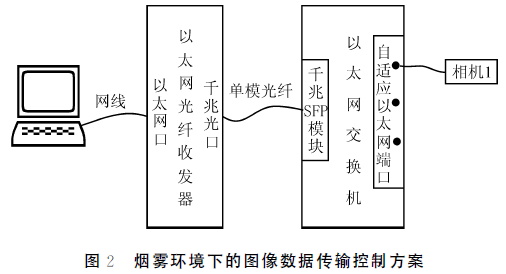
(3)图像数据传输控制设备。本系统采用千兆以太网交换机配合LINGRIA以太网光纤收发器联合搭建,由计算机、光纤收发器、以太网交换机和相机共同组成,通过单模光纤传输的控制方式,实现图像数据的传输控制。图像数据传输控制方案如图2所示。
(4)通信控制模块。本系统采用西门子公司型号为S7-200的PLC,将其设置在数据采集电路系统和计算机之间。它在实时模式下控制数据传输时具有速度快、通讯效率较高的特点。
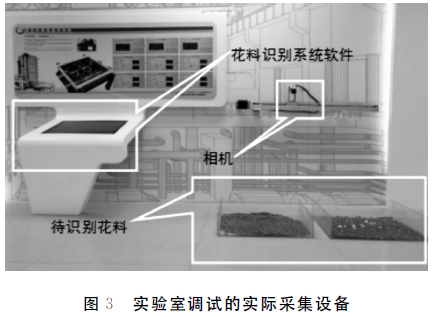
在正式使用本系统前,先在实验室内仿照搅拌仓搭建箱体,将LED光源和千兆以太网相机组件安装在模拟箱体的相应位置,并对LED光源的照射范围和相机的最佳成像视场宽度进行调整,确定最佳的标定位置,使相机的成像视场在LED光源的最强、最均匀照明光束内。然后做校准操作,调节内部相机的位置以及镜头的焦距和光圈大小,再开始采集图像。这样做的目的是使采集到的集料图像清晰、可靠。通过在实验室模拟箱体的安装和调试,今后在现场安装设备时不用做太多的调试。实验室中调试的设备如图3所示,已经将沥青混合料花白料识别系统封装完成,利用此套设备可实现花料图像的采集及识别。
本系统在现场的使用如图4所示。相机和闪光灯均采用专门设计的支架固定在拌合站料仓观察口,对混合料花白料进行实时图像采集。

烟雾和灰尘环境下的沥青混合料图像预处理
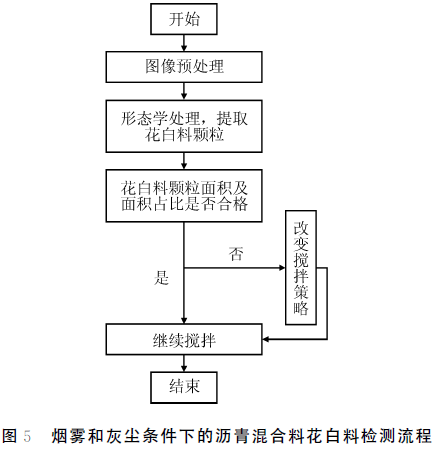
图像预处理对于恢复原始图像具有无可替代的作用,因此采集到沥青混合料图像之后,首先要对其进行预处理,选择最有用的线性平滑滤波器去除图像中的高斯噪声,从而得到准确的图像修复结果。之后进行相关形态学处理,提取花白料的轮廓边界信息。依据花白料的面积和面积占比分析,判断沥青混凝土搅拌是否均匀,从而提出有效的搅拌决策,提高搅拌质量。烟雾和灰尘条件下的沥青混合料花白料检测识别方法的流程如图5所示。
虽然在实验室搭建的模拟环境下可以有效识别沥青混合料花白料颗粒,但是实际的施工现场环境十分恶劣。在实际的检测过程中,经常会在采集图像时受到烟雾和灰尘的极大干扰,使得图像质量较差。图6是相机在施工现场实际采集到的有烟雾情况下的沥青混合料图像。
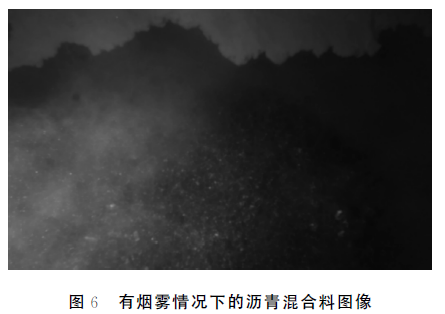
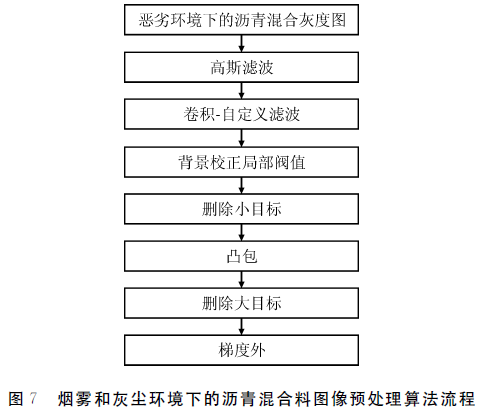
从图6可以看出,由于烟雾和灰尘的遮盖,无法采集到清晰的沥青混合料图像。为了在这种恶劣环境下识别沥青混凝土花白料颗粒,本文提出了烟雾和灰尘环境下的沥青混合料图像处理算法流程,如图7所示。首先对在烟雾环境下采集的沥青混合料图像使用高斯滤波去噪,并采用卷积-自定义滤波进行锐化处理;然后使用背景校正局部阈值算法进行阈值分割;最后利用删除小目标、凸包、删除大目标、梯度外等形态学处理算法提取图像中的花白料颗粒及其边缘轮廓。
烟雾环境下的沥青混合料图像滤波
(1)高斯滤波
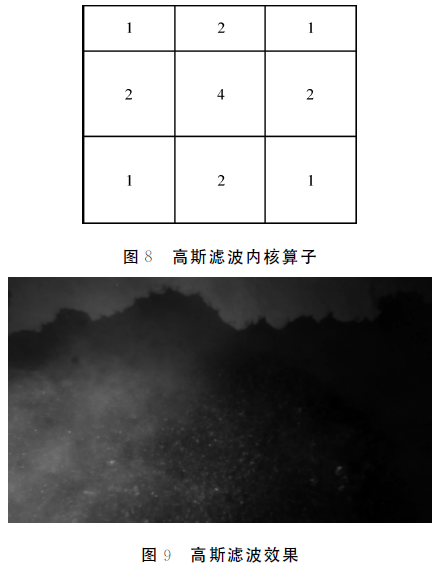
在含有烟雾和灰尘的复杂场景下,沥青混合料图像在采集和传输过程中都会受到各种混入噪声的干扰,图像上出现的噪声点使得清晰度严重下降、色彩失真、分辨率降低、轮廓和边缘信息损失增加。本文使用内核大小为3×3的高斯滤波算子达到减弱高斯噪声,提高图像质量的目的[15-16]。掩模大小为3的高斯滤波内核算子如图8所示,高斯滤波效果如图9所示。由于现场环境恶劣,在烟雾下对图像进行滤波处理的效果并不是十分明显,但高斯滤波却能在一定程度上滤除细小噪声,为之后的图像阈值分割做准备。图像经过高斯卷积运算后,与采集的原始图像相比,达到了减弱噪声、增强图像对比度和图像边缘的效果,提高了图像质量,并验证了模板尺寸为3时效果最佳,使得复原的图像明暗适宜,有效地抑制了噪声。
(2)卷积-自定义滤波
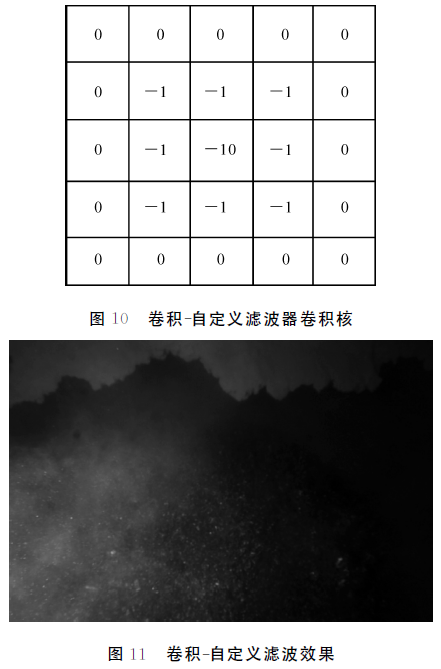
通过分析图像的滤波处理过程可知,高斯滤波减弱沥青混合料图像噪声的过程会使得图像整体模糊化,故在高斯滤波器滤除噪声之后,再接着使用内核大小为5×5的卷积-自定义滤波器对图像进行滤波,改善图像模糊程度。卷积-自定义滤波器卷积核如图10所示,卷积-自定义滤波效果如图11所示,突出了图像的边缘,有利于与背景分离,便于之后的阈值分割处理。在恶劣的现场环境下,卷积-自定义滤波效果并不是十分明显,却能在一定程度上改善高斯滤波的图像模糊情况,有利于之后的图像阈值分割。
烟雾环境下的沥青混合料图像阈值分割
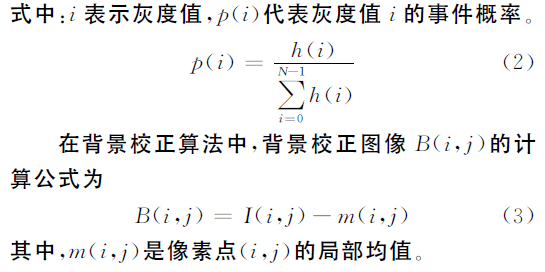
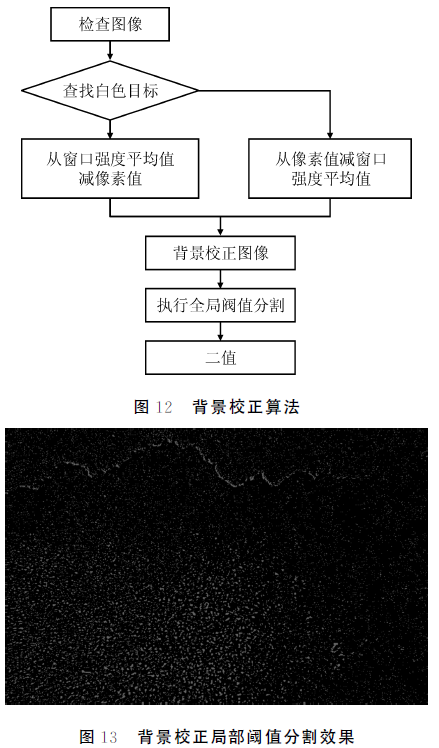
为了能在有烟雾的情况下有效地识别花白料,使用背景校正局部阈值算法对图像进行阈值分割,这样做能使图像更加清晰。有烟雾的图像背景校正算法流程如图12所示,分割之后的效果如图13所示。
为了使图像分割达到最佳效果,在背景校正图像过程中使用组内方差自动阈值法。组内方差是一种基于差别分析的统计技术,最优阈值由类别之间的阈值差异的最大值决定[17]。阈值的像素值k是使下面的表达式值最大时的最优阈值。
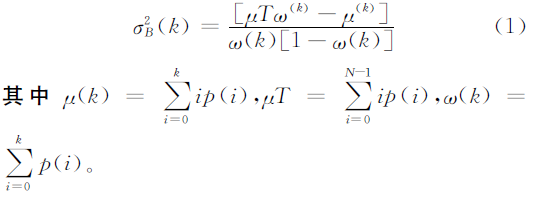
式中:i表示灰度值,p(i)代表灰度值i的事件概率。
烟雾环境下的沥青混合料图像形态学处理
烟雾和灰尘的干扰使得经过阈值分割后的二值图像中出现了许多杂乱颗粒,因此在识别沥青混合料花白料时,首先针对较大颗粒进行分析处理,再对相对略小的颗粒做处理。为了检测识别出所有的花白料,本方法结合颗粒多且分布杂乱的特点,对烟雾环境下的沥青混凝土的二值图像进行相关形态学处理操作[18],再采用凸包算法提取并绘制烟雾图像中的较大颗粒及其边缘轮廓。
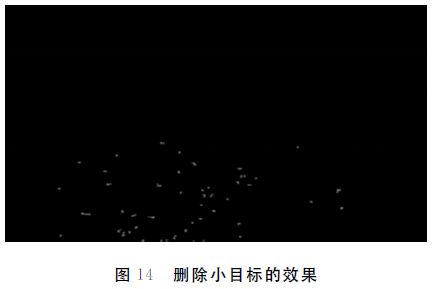
(1)删除小目标
删除小目标是为了使图像更简洁,便于图像处理和分析。为了提取烟雾和灰尘环境中的沥青混合料图像里的大颗粒,分别使用3×3的掩模、正方形像素帧、邻域4连通的算子对图像进行2次腐蚀运算,效果如图14所示。
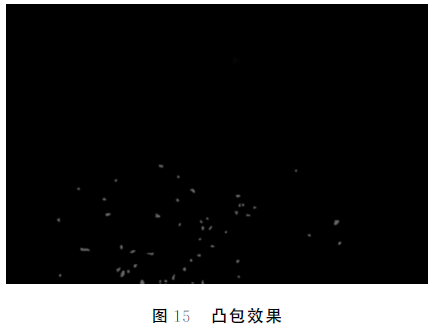
(2)凸包
为了测量烟雾和灰尘环境下的沥青混合料图像中的花白料颗粒的特征检测参数,本方法选择凸包算法对这类颗粒进行图像处理[19]。经过凸包后的颗粒边缘更加平滑,形状也更接近原始颗粒。后续提取颗粒特征参数都是基于凸包之后的颗粒的。为了准确地理解颗粒的形状和轮廓,本文选择邻域8连通的凸包函数,计算颗粒的凸包,使得烟雾和灰尘下的颗粒也能表现出原有的特性。凸包效果如图15所示。
(3)删除大目标
为了使分析结果更清晰、准确,本方法将分别处理大、小目标,首先删除图像中较大的目标,留下较小的目标。本文选择3×3的掩模、六边形像素帧、邻域8连通的算子对图像进行3次腐蚀运算,删除大目标的效果如图16所示。
(4)梯度外
为了提取沥青混合料图像中花白料的轮廓,使用梯度外提取粒子的外部轮廓。这里的外部轮廓是指二值化后值为0的轮廓。外部边缘函数是从膨胀的图像中减去原始图像得到的。剩下的像素对应膨胀过程中被添加的像素。如果I是一幅图像,则


在对烟雾和灰尘下的沥青混合料的凸包检测中,本文选择5×5自定义滤波器卷积核结合圆形像素帧,梯度外函数选择邻域8连通,提取并绘制颗粒凸包后的外部轮廓,根据轮廓提取凸多边形,效果如图17所示。
烟雾环境下花白料的识别检测
针对图像预处理之后的沥青混合料二值图像,分析由凸包算法提取的外部轮廓后,本方法首先标记出检测到的沥青混合料中的花白料颗粒,然后计算图像中目标白背景的像素数,得到颗粒面积以及面积占比。为了准确地判断沥青混合料是否被搅拌均匀,需要计算出花白料颗粒面积及其占整幅图像的比例,为后续解决烟雾和灰尘环境下检测和识别花白料提供依据。
烟雾环境下的沥青混合料花白料标记
烟雾环境下的沥青混合料灰度图经过形态学处理后,还无法精确地显示花白料的位置。为了找到混合料中花白料的位置,使用灰度图像运算方法,在原图中标记出花白料颗粒,效果如图18所示。

提取烟雾环境下的花白料特征参数
在沥青混合料二值图像中标记花白料颗粒之后,计算图像中白色颗粒的实际颗粒面积以及该面积占整个图像的比例。为了提取花白料的特征参数,先计算每个花白料颗粒的面积占比。Ai表示第i个花白料颗粒的面积,A表示图像的总面积,则计算面积占比p的公式为

结果与分析
使用本文设计的图像采集设备在施工现场采集了100张烟雾环境下的沥青混合料图像,其中76张图像中有花白料颗粒。使用本文提出的方法可以全部准确地识别并检测这76张烟雾和灰尘条件下的沥青混凝土图像中的花白料颗粒。表1所示是其中10张沥青混合料图像中花白料的识别检测结果,充分证明了本文提出的识别方法在实际应用中的有效性。

结语
本文根据沥青混合料现场施工搅拌过程中识别不均匀混合料的需求,提出了在烟雾环境下识别沥青混合料花白料的方法。本方法首先搭建了沥青混合料图像采集平台,实现了图像的连续采集及存储;接下来搭建了基于PLC自动控制工业相机的图像采集控制系统,实现了动态图像的无失真实时采集与分析;然后提出了适合在有烟雾遮挡的情况下的沥青混合料实时图像处理与分析方法;最后提取图像中的花白料颗粒及其边缘轮廓参数信息,针对得到的较大颗粒的参数信息进行分析,有效地反映所测沥青混合料的搅拌情况,从而为随时改变搅拌策略提供依据。
现场检测结果表明,本识别方法可以在烟雾以及灰尘遮挡的情况下检测识别沥青混合料中的花白料颗粒,检测准确率充分证明了本文提出的方法在实际应用于烟雾环境下的沥青混合料花白料检测识别时的有效性。
审核编辑 :李倩
-
液态沥青料位传感器的研究2009-07-14 437
-
沥青拌和设备在生产排水性沥青混合料中的温度控制探讨2010-01-21 706
-
西门子S7-200PLC在沥青混合料转运车电控系统中的应用2009-06-15 1251
-
数学形态学在沥青混合料特征提取中的应用研究2012-07-05 1153
-
基于Harris-SIFT的缝料视觉定位系统综述2021-06-22 878
-
材料料仓的料位测量方案说明2021-07-21 1956
-
沥青拌合站监控系统组成功能详解2023-06-07 1707
-
柔性上料盘 视觉散料 柔性供料器2021-06-08 1414
-
柔性上料 视觉散料弗莱克斯2022-01-07 1104
-
柔性供料器 机器人上料 视觉散料弗莱克斯2021-09-06 1306
-
柔性供料器 anyfeeder视觉散料2022-01-22 1302
-
沥青混合料拌合站监控系统数据监测过程功能详解2023-07-03 1585
-
沥青混合料运输监测系统在高速公路建设过程中应用2023-11-03 995
-
解决方案 | 3D视觉引导车门内板上料2024-03-28 1190
全部0条评论

快来发表一下你的评论吧 !
