

智能I/O简化了无人水下航行器的有效载荷变化要求
描述
随着军方继续寻找将这些智能机器用于战斗、侦察和反地雷任务的新方法,无人海上车辆的开发和部署正在迅速扩大。无人水下航行器(UUV)制造商正面临着包括成本、时间、尺寸、重量和功耗在内的关键设计挑战。此外,为现有I/O和通信系统添加功能,特别是扩展有效载荷选项,是无人驾驶海上车辆的一个关键设计考虑因素。进入先进的嵌入式计算架构,将 I/O 和通信与任务关键型计算机相结合,无需重新设计昂贵的机箱或背板。这些基于以太网通信的系统可以配置多个 I/O 功能,以满足不断变化的有效载荷要求。
无人潜航器成长于公海(尽管浅水威胁也是一个问题)威胁的时代。这些车辆更倾向于使用基于COTS的嵌入式系统和模块化架构,因为需要更高的运营效率,减少军事预算和任务时间设计限制。
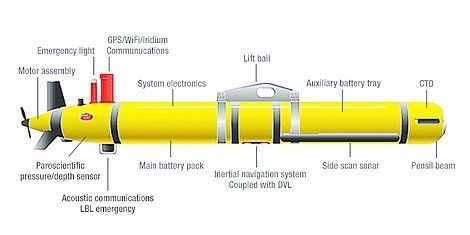
可互换的以任务为中心的电子设备是UUV设计的标志,因为海军任务的性质不断变化 - 水下搜索,海岸防御,海上拒止,封锁等 - 需要能够执行各种应用的替代有效载荷。在这些情况下,模块化设计架构使开发人员免于集成难题,同时使他们能够根据当前和未来的任务要求快速配置系统或机箱。(图 1)。
图1:使用先进嵌入式系统的设计有助于解决无人水下航行器的尺寸、重量、功耗和成本 (SWaP-C) 挑战。
换句话说,UUV制造商可以采用基于特定应用和标准COTS产品的智能I / O和通信系统和子系统,而不是仅仅使用单板计算机(SBC),鉴于背板和机箱设计的特定性质,最终可能导致I/O如何在盒子中连接的不确定性。此外,非经常性工程(NRE)成本可能会飙升,而系统集成商被迫重新认证。
因此,毫不奇怪,像Bluefin-21和Knifefish这样的早期UUV设计在使用COTS产品时依赖于具有模块化和分布式接口的嵌入式计算解决方案。嵌入式计算、能源效率、传感器、机器人和位置引导技术的进步现在使海军能够用更便宜的全自动UUV来增强昂贵的载人系统。
为什么选择模块化设计?
无人驾驶海上车辆通常由多个非机外传感器组成,包括指南针、多普勒速度记录仪、惯性导航系统和声速传感器,它们以高度自动化的方式执行搜索、避开或跟踪操作。首先,车辆需要一个稳定的控制系统来执行车辆自主性、任务规划和执行、有效载荷数据管理以及其他以处理为中心的任务。
接下来,UUV 需要了解其环境中的特征,以便它们能够智能地检测和分类物品,然后以自动方式响应传感器数据。在这个领域,基于低功耗和高性能处理器的车辆控制系统与监控传感器密切合作,使用适当的有效载荷对物理或战术任务做出反应。
这种复杂性恰恰表明了控制或处理器部分与传感器部分之间的连接是多么重要。同时读取和仿真数据的能力需要强大的处理和I / O功能,这是UUV设计中的巨大要求。
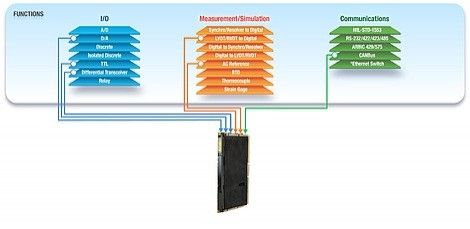
模块化和高度自适应的架构(图2)允许UUV设计人员将控制器板添加到现有系统,并将其连接到以太网或CAN总线;控制器板将连接到UUV制造商想要支持的任何有效载荷。它必须是一个灵活且可扩展的设计解决方案,因为主系统不能进行重大更改。
图2:模块化架构使UUV设计人员能够为特定有效载荷选择合适的COTS组件,将它们添加到子系统中,并连接到以太网网络。
相比之下,创建一个具有上述所有功能的新盒子可能会增加设计复杂性并导致额外的 NRE 成本。以为新有效载荷添加新的任务计算机为例:首先,设计人员可能不知道如何将旧式传感器/换能器与新板连接。然后,设计师可能不得不重新鉴定整个盒子,这可能需要几个月的时间。
智能 I/O 功能
无人潜航器可以改变游戏规则 - 就像无人机(UAV)在空中一样 - 通过为海军舰队提供完整的作战图景。然而,作为公海的眼睛意味着有大量的水需要监测。提供智能多功能I/O和通信功能将成为UUV设计的关键要求。
I/O 功能专门针对 UUV 必须携带的有效载荷。例如,如果UUV必须处理从以太网到同步/解析器或以太网到CANbus的I/O功能,则必须能够轻松地为I/O设备配置多种功能。另一个例子:以需要使用电阻温度检测器(RTD)通道监测温度的UUV为例。
在这种情况下,COTS 模块化和可配置板使 UUV 设计人员能够快速为这种新有效载荷创建应用程序。可配置的 I/O 模块足够灵活,可以适应具有各种 I/O 设备的不同有效负载。此外,对于UUV上的新有效载荷,系统集成商可以简单地将预认证板添加到已经合格和测试的盒子中。
无人机设计重演
值得注意的是,无人潜航器不一定只是“海上无人机”,因为它们在大多数情况下不是远程驾驶的。与无人机不同,无人机天生就能够很好地从空中获取无线电信号,海水对于无线电通信是不透明的;此外,声音信号的传播速度比无线信号慢。
UUV 是完全自主和高度自动化的,这一事实要求基于基本构建模块(通信、电源管理、数据管理和存储)的极其坚固可靠的电子设备。然而,与此同时,UUV 的解剖结构与无人机设计蓝图非常相似。这一现实对海军工程师来说是一种可喜的解脱。无人机通过使用COTS组件和模块化架构开创了先例,现在UUV设计人员正在效仿,以实现SWaP-C问题。
使用特定应用的标准 COTS 系统,使工程师能够通过使用多功能 I/O 和与以太网数据集中器的通信来绕过昂贵的机箱重新设计。
显然,无人潜航器正在重塑海战的基本基础。美国海军承认无人潜航器将成为其常规舰队的力量倍增器,并在2016年预算中为扩大其无人潜航器舰队分配了大量资金。现在,由设计工程师来证明他们可以在不进行SWaP-C权衡的情况下创建创新的电子系统。
审核编辑:郭婷
-
抗辐射FDA作为通信和雷达有效载荷中的时钟缓冲器2024-10-25 459
-
DARPA引领无人水下航行器(UUV)电源技术的进步2023-01-09 3150
-
小型UAS有效载荷带来SWaP和带宽挑战2022-10-31 1548
-
UAS有效载荷在更小的封装中获得更智能的传感器2022-10-28 1621
-
法国开发利用无人机携带更广泛的有效载荷的潜力2020-11-17 1064
-
zed板有没有办法立刻收到完整的有效载荷?2020-04-29 1815
-
使用无人驾驶船部署自主水下航行器的新系统2020-01-11 3685
-
运载平台怎么实验水下航行器的功能?2019-08-16 1690
-
水下航行器模拟平台系统的总体架构是什么?2019-08-09 1938
-
无人机技术再破记录 携带最大有效载荷2019-01-07 6971
-
携带超过200磅有效载荷Dauntless无人机2018-12-05 5799
-
一文解读软件定义的有效载荷及通信卫星未来发展方向2018-04-20 4760
-
什么是通信卫星有效载荷(payload)2010-04-03 3045
-
新型空间有效载荷控制器接口设计2009-08-15 824
全部0条评论

快来发表一下你的评论吧 !
