

机器人辅助的声流控末端效应器的应用
描述
液体操作是众多实验室工作得以正常开展的基础。在过去十年中,芯片实验室(LOC)系统已开始用于微液体操作,尽管机器人与芯片实验室有潜在的协同作用,但是各自独立发展,目前还没有合适的接口来连接宏观级机器人与微观级芯片实验室或微流控器件。
据麦姆斯咨询报道,瑞士苏黎世联邦理工学院(ETHZ)携手苏黎世大学(UZH)及美国内布拉斯加林肯大学(UNL)开发出一种机器人辅助的声流控末端效应器(RAEE)系统,该系统包括机械臂和声流控末端效应器,并结合了机器人和微流控功能。
研究人员进一步进行了流体泵送、微粒和斑马鱼胚胎捕获,以及复杂粘性液体的移动混合的实验。最后,他们对机器人辅助的声流控末端效应器系统进行了预编程,以实现孔板中粘性液体的自动混合,这展示了其在自动执行化学进程中的多功能性。
注:效应器(effector)原指运动神经末梢和它所支配的肌肉或腺体,本文指附着在机器人机械臂上的外围设备,允许机器人与其任务相互作用。
该声流控末端效应器包括一个外径为1500 μm,末端细至3μm~10 μm的中空硼硅酸盐毛细管,加上一个压电电子换能器。该压电换能器基于调节频率和振幅的电子函数发生器的输入产生声波,从而控制毛细管的振荡。声波的激励频率从5kHz调制到300 kHz,同时保持1~20 VPP的峰值电压。
该声流控效应器通过五轴机械臂的注射器连接到定制的3D打印支架上。研究人员将整个装置放在倒置的显微镜附近,并通过荧光显微镜对系统进行研究。该装置的特征在于将其浸入含有2.0μm和5.0 μm示踪粒子(下图b)的液体腔室中,并使用光敏和高速相机捕捉实验结果。
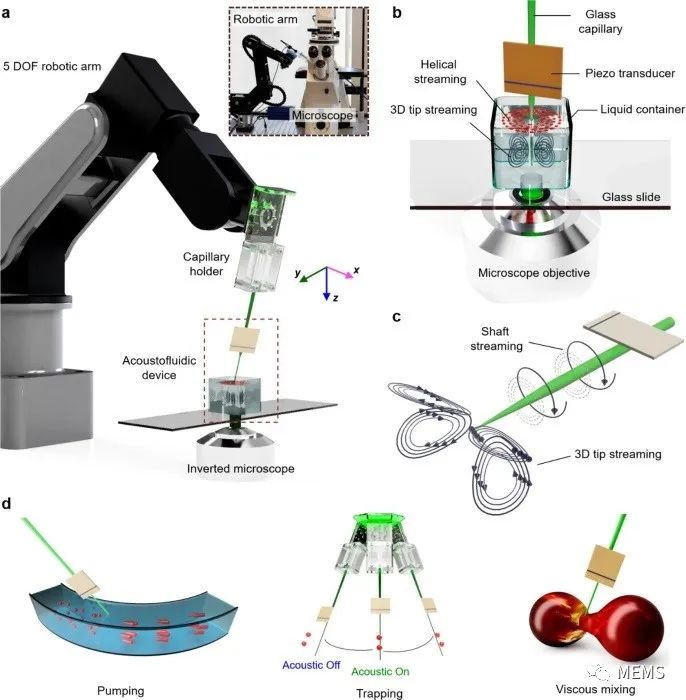
机器人辅助的声流控末端效应器(RAEE)的实验装置和工作原理
研究人员在毛细管尖端观察到与频率相关的3D流曲线。这些曲线包括不等量的顺时针流动模式和逆时针流动模式(见下图)。当毛细管分别暴露于频率为64.6 kHz和140 kHz的超声波下时,出现了由四个反向旋转的涡流组成的复杂蝶形涡流模式(下图a、b)。
洋红色圆圈代表毛细管尖端,黄色箭头表示流向。相比之下, 分别在69.5 kHz和269 kHz的激励频率 下,仅产生了一对关于尖端对称的反向旋转漩涡(下图c、d)。
尽管这两个流曲线相似,但下图d中的流曲线相对于下图c中的流曲线旋转了135°。有趣的是,虽然大多数已形成的流动模式是关于尖端对称的,但也观察到一些例外情况。
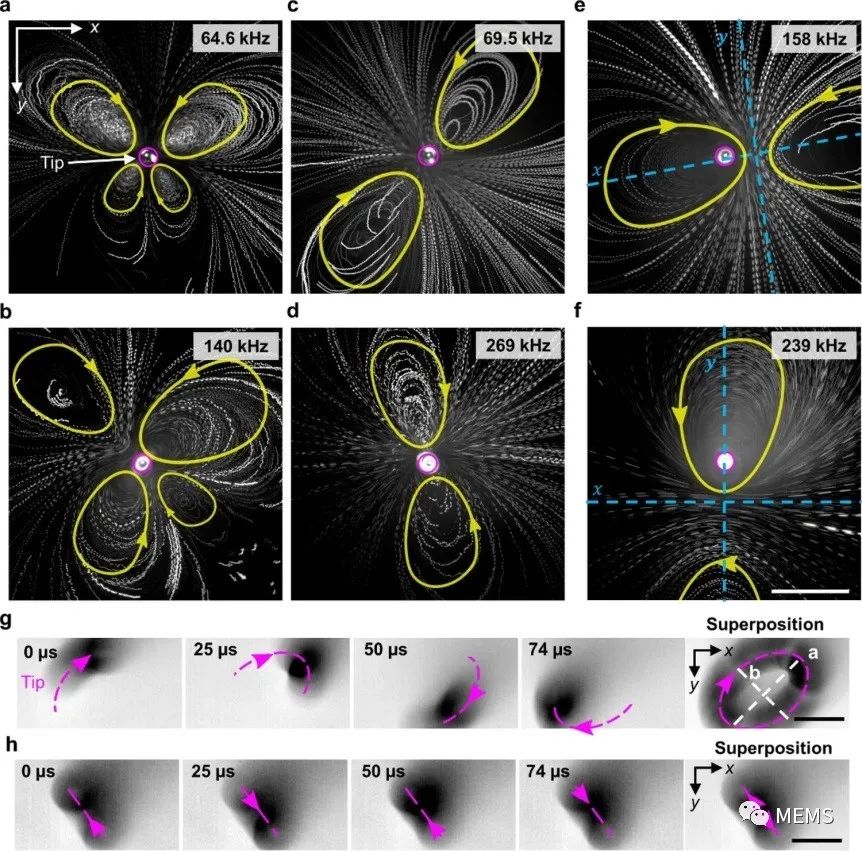
在含有示踪粒子的水中,声流控装置尖端产生特定频率的旋涡或流体
研究人员采用较低的频率,并使用高速成像相机捕捉空气中毛细血管尖端的振荡。他们从正面和侧面研究了毛细管的振荡。总体而言,观测结果显示机器人辅助的声流控末端效应器在毛细管尖端附近产生不同强度的可控流动模式的能力,受驱动频率和声功率调制的影响。
而斑马鱼胚胎是极好的高等哺乳动物替代模型,其经常被用来研究与人类疾病相关的分子机制,并广泛用于制药目的的治疗研究。在该实验中,研究人员设计了一种基于振荡玻璃毛细管发出的声辐射力的捕获装置。该设备与机械臂的集成使研究人员能够根据任何预编程轨迹,在2D和3D环境中捕捉和操纵胚胎。
他们通过捕获并麻醉受精后(HPF)120小时的斑马鱼胚胎,来证明机器人辅助的声流控末端效应器的多功能特性。当毛细管末端和斑马鱼胚胎之间为毫米距离时,研究人员将机器人辅助的声流控末端效应器带到胚胎附近并激活。他们观察到胚胎被强力拉向声流控装置,也就是说,它已经被捕获在毛细管末端了(下图a)。
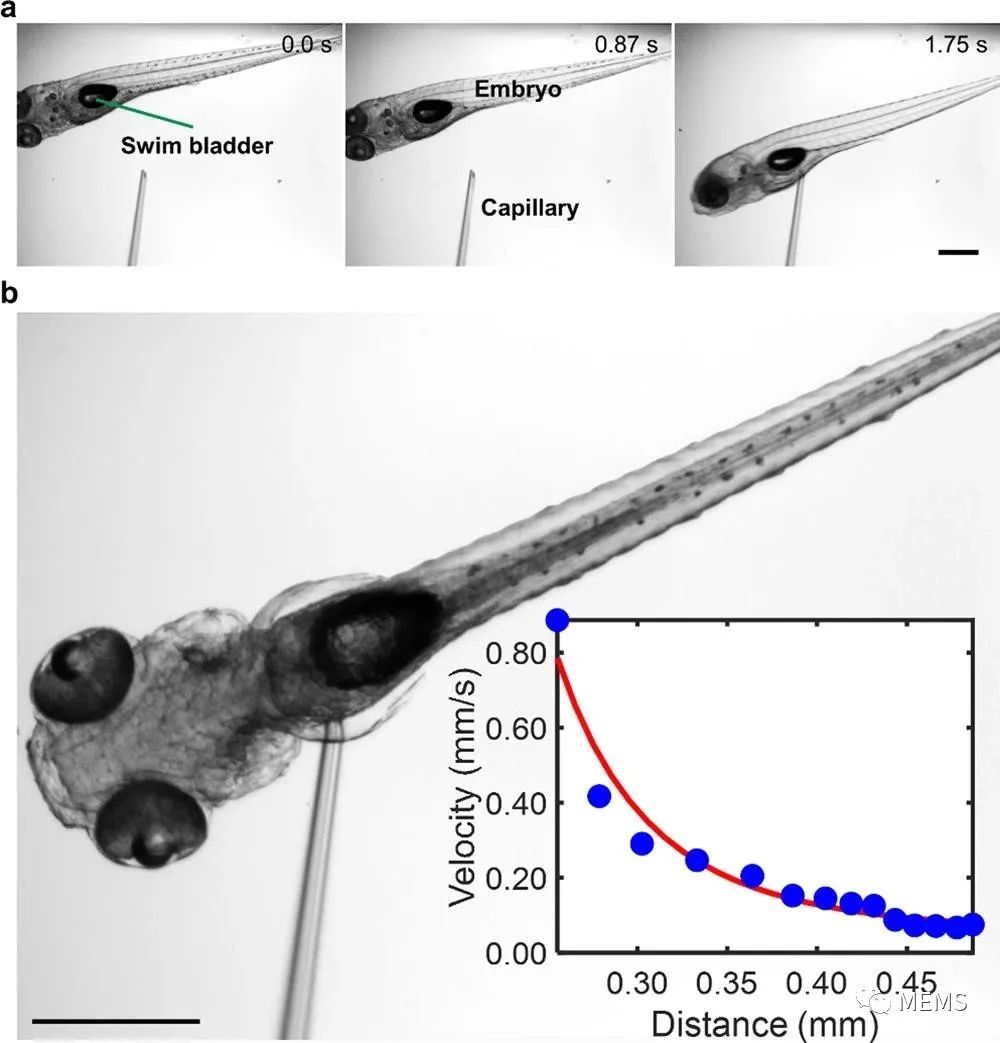
利用机器人辅助的声流控末端效应器捕捉斑马鱼胚胎
综上所述,该论文介绍了首个结合机械臂的声流控末端效应器,从而实现了宏观级机器人与微观级液体和粒子操纵技术之间的连接。机器人辅助的声流控末端效应器是一个多功能平台,可以广泛应用于化学、生物学和生命科学等领域。这种新型基于毛细管的声流控装置产生两种不同的稳定涡旋流曲线:(i)沿毛细管的螺旋流或螺旋状运动;(ii)毛细管尖端的与频率相关的3D流曲线。
为了证明该系统的通用性性和多功能性,研究人员对粘性液体进行了泵送、液滴合并、选择性微粒捕集和移动混合。他们进一步演示了斑马鱼胚胎的捕获。最后,他们对机器人辅助的声流控末端效应器进行了预编程,使其能够在孔板中实现粘性液体的自动混合,证明了其在化学过程自动执行中的多功能性。
该声流控装置的制造成本不到20美元,可以连接到任何商用机械臂上,并实现自动化和多功能性,值得注意的是,操作的精度取决于机械臂。尽管如此,由于其易于构建,多功能机器人辅助的声流控末端效应器在需要重复样品制备的基础步骤或转化研究中可能会更有价值,特别是涉及微量移液,以及其它通常由人工操作执行的研究。
审核编辑:刘清
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
关节机器人控制2015-04-29 5462
-
工业机器人的工作原理2017-12-15 4764
-
工业机器人的末端关节旋转该精确控制?2018-11-01 4403
-
机器人是什么?2022-03-31 22299
-
设计一种可用于大学和学校教授机器人技术的机器人2022-07-25 1919
-
高可靠性末端效应器控制系统设计2012-08-29 681
-
机器人风口抢食 末端工具谁家最强2019-05-08 2796
-
随着工业机器人的发展,末端工具市场将如何?2019-05-18 3060
-
工业机器人的末端工具指的是什么2019-08-14 5378
-
工业机器人应用中末端工具有什么作用2019-09-20 2749
-
什么是工业机器人末端执行器2020-09-21 10615
-
一种低成本的机器人手臂,应用于在线机器人教育领域2021-01-06 3826
-
机器人末端抓手的结构及工作原理2023-06-09 5196
-
机器人末端抓手的工作原理及结构设计2023-11-04 2936
全部0条评论

快来发表一下你的评论吧 !
