

i.MX6ULL|字符设备驱动开发实践
描述
字符设备驱动开发的基本步骤可以看上一篇,本节就以 chrdevbase 这个虚拟设备为例,完整的编写一个字符设备驱动模块。chrdevbase 不是实际存在的一个设备,方便讲解字符设备的开发而引入的一个虚拟设备。chrdevbase 设备有两个缓冲区,一个为读缓冲区,一个为写缓冲区,这两个缓冲区的大小都为 100 字节。在应用程序中可以向 chrdevbase 设备的写缓冲区中写入数据,从读缓冲区中读取数据。chrdevbase 这个虚拟设备的功能很简单,但是它包含了字符设备的最基本功能。
| 需求目标
应用程序调用 open 函数打开 chrdevbase 这个设备,打开以后可以使用 write 函数向chrdevbase 的写缓冲区 writebuf 中写入数据(不超过 100 个字节),也可以使用 read 函数读取读缓冲区 readbuf 中的数据操作,操作完成以后应用程序使用 close 函数关闭 chrdevbase 设备。
| 实现过程
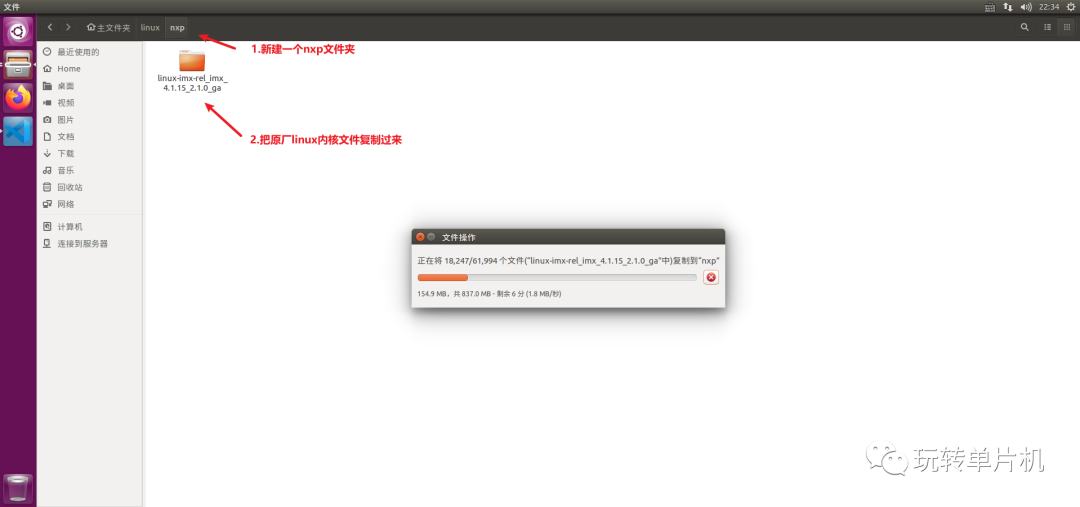
1. 新建文件一个nxp文件夹,然后把原厂内核文件复制过来
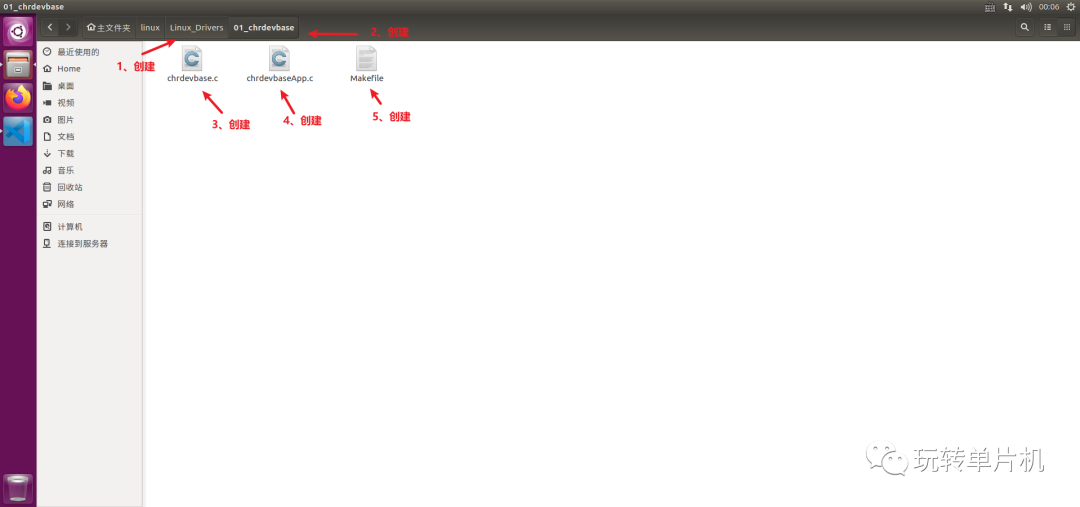
2、创建Linux_Drivers用于存放驱动文件,创建01_chrdevbase用于存放chrdevbase实验文件,chrdevbase.c是底层驱动代码,chrdevbaseApp.c是应用代码,Makefile编译底层驱动;
3、编写代码
chrdevbase.c文件
#include#include #include #include #include #include #define CHRDEVBASE_MAJOR 200 /* 主设备号 */ #define CHRDEVBASE_NAME "chrdevbase" /* 设备名 */ static char readbuf[100]; /* 读缓冲区 */ static char writebuf[100]; /* 写缓冲区 */ static char kerneldata[] = {"kernel data!"}; /* * @description : 打开设备 * @param - inode : 传递给驱动的inode * @param - filp : 设备文件,file结构体有个叫做private_data的成员变量 * 一般在open的时候将private_data指向设备结构体。 * @return : 0 成功;其他 失败 */ static int chrdevbase_open(struct inode *inode, struct file *filp) { //printk("chrdevbase open! "); return 0; } /* * @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符) * @param - buf : 返回给用户空间的数据缓冲区 * @param - cnt : 要读取的数据长度 * @param - offt : 相对于文件首地址的偏移 * @return : 读取的字节数,如果为负值,表示读取失败 */ static ssize_t chrdevbase_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt) { int retvalue = 0; /* 向用户空间发送数据 */ memcpy(readbuf, kerneldata, sizeof(kerneldata)); retvalue = copy_to_user(buf, readbuf, cnt); if(retvalue == 0){ printk("kernel senddata ok! "); }else{ printk("kernel senddata failed! "); } //printk("chrdevbase read! "); return 0; } /* * @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符 * @param - buf : 要写给设备写入的数据 * @param - cnt : 要写入的数据长度 * @param - offt : 相对于文件首地址的偏移 * @return : 写入的字节数,如果为负值,表示写入失败 */ static ssize_t chrdevbase_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt) { int retvalue = 0; /* 接收用户空间传递给内核的数据并且打印出来 */ retvalue = copy_from_user(writebuf, buf, cnt); if(retvalue == 0){ printk("kernel recevdata:%s ", writebuf); }else{ printk("kernel recevdata failed! "); } //printk("chrdevbase write! "); return 0; } /* * @description : 关闭/释放设备 * @param - filp : 要关闭的设备文件(文件描述符) * @return : 0 成功;其他 失败 */ static int chrdevbase_release(struct inode *inode, struct file *filp) { //printk("chrdevbase release! "); return 0; } /* * 设备操作函数结构体 */ static struct file_operations chrdevbase_fops = { .owner = THIS_MODULE, .open = chrdevbase_open, .read = chrdevbase_read, .write = chrdevbase_write, .release = chrdevbase_release, }; /* * @description : 驱动入口函数 * @param : 无 * @return : 0 成功;其他 失败 */ static int __init chrdevbase_init(void) { int retvalue = 0; /* 注册字符设备驱动 */ retvalue = register_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME, &chrdevbase_fops); if(retvalue < 0){ printk("chrdevbase driver register failed "); } printk("chrdevbase init! "); return 0; } /* * @description : 驱动出口函数 * @param : 无 * @return : 无 */ static void __exit chrdevbase_exit(void) { /* 注销字符设备驱动 */ unregister_chrdev(CHRDEVBASE_MAJOR, CHRDEVBASE_NAME); printk("chrdevbase exit! "); } /* * 将上面两个函数指定为驱动的入口和出口函数 */ module_init(chrdevbase_init); module_exit(chrdevbase_exit); /* * LICENSE和作者信息 */ MODULE_LICENSE("GPL"); MODULE_AUTHOR("zuozhongkai");
chrdevbaseApp.c文件
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
static char usrdata[] = {"usr data!"};
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功;其他 失败
*/
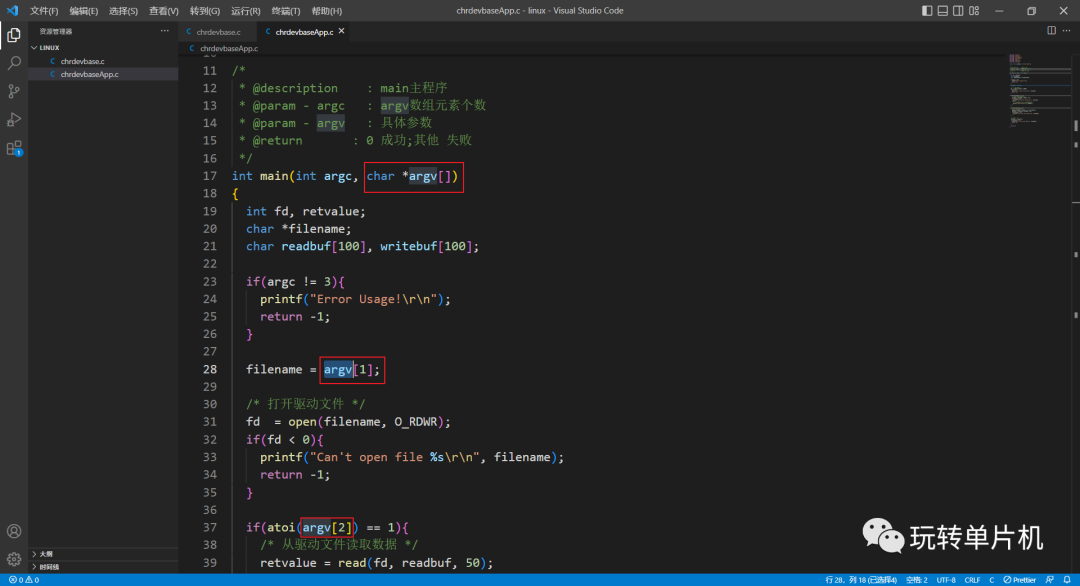
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
char readbuf[100], writebuf[100];
if(argc != 3){
printf("Error Usage!
");
return -1;
}
filename = argv[1];
/* 打开驱动文件 */
fd = open(filename, O_RDWR);
if(fd < 0){
printf("Can't open file %s
", filename);
return -1;
}
if(atoi(argv[2]) == 1){
/* 从驱动文件读取数据 */
retvalue = read(fd, readbuf, 50);
if(retvalue < 0){
printf("read file %s failed!
", filename);
}else{
/* 读取成功,打印出读取成功的数据 */
printf("read data:%s
",readbuf);
}
}
if(atoi(argv[2]) == 2){
/* 向设备驱动写数据 */
memcpy(writebuf, usrdata, sizeof(usrdata));
retvalue = write(fd, writebuf, 50);
if(retvalue < 0){
printf("write file %s failed!
", filename);
}
}
/* 关闭设备 */
retvalue = close(fd);
if(retvalue < 0){
printf("Can't close file %s
", filename);
return -1;
}
return 0;
}
Makefile文件
KERNELDIR := /home/noah/linux/nxp/linux-imx-rel_imx_4.1.15_2.1.0_ga CURRENT_PATH := $(shell pwd) obj-m := chrdevbase.o build: kernel_modules kernel_modules: $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules clean: $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
相关解析:
第 1 行,KERNELDIR 表示开发板所使用的 Linux 内核源码目录,使用绝对路径,大家根据自己的实际情况填写即可。 第 2 行,CURRENT_PATH 表示当前路径,直接通过运行“pwd”命令来获取当前所处路径。 第 3 行,obj-m 表示将 chrdevbase.c 这个文件编译为 chrdevbase.ko 模块。 第 8 行,具体的编译命令,后面的 modules 表示编译模块,-C 表示将当前的工作目录切换到指定目录中,也就是 KERNERLDIR 目录。M 表示模块源码目录,“make modules”命令中加入 M=dir 以后程序会自动到指定的 dir 目录中读取模块的源码并将其编译为.ko 文件。
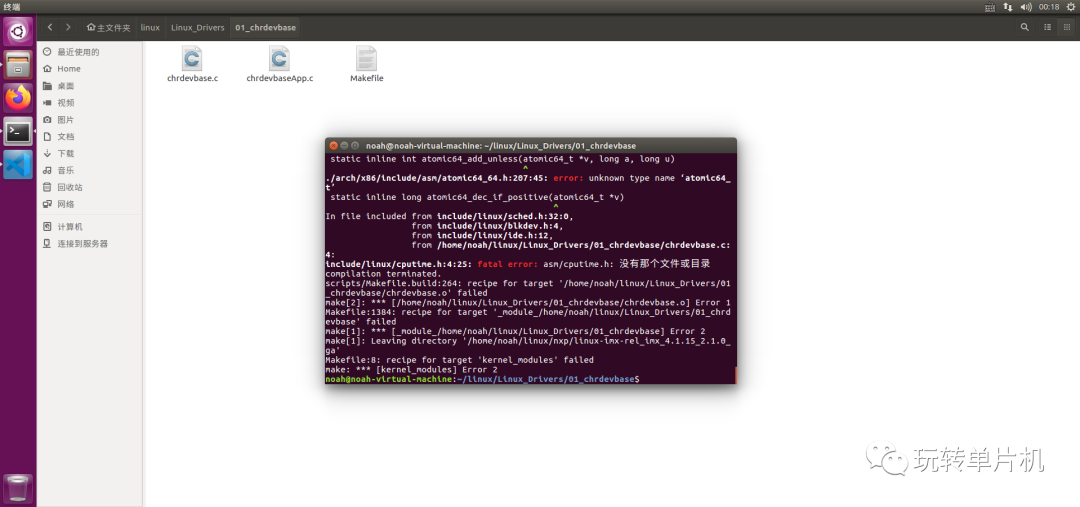
4、编译驱动
直接使用make命令会报错的,因为kernel中没有指定编译器和架构,使用了默认的x86平台编译报错。
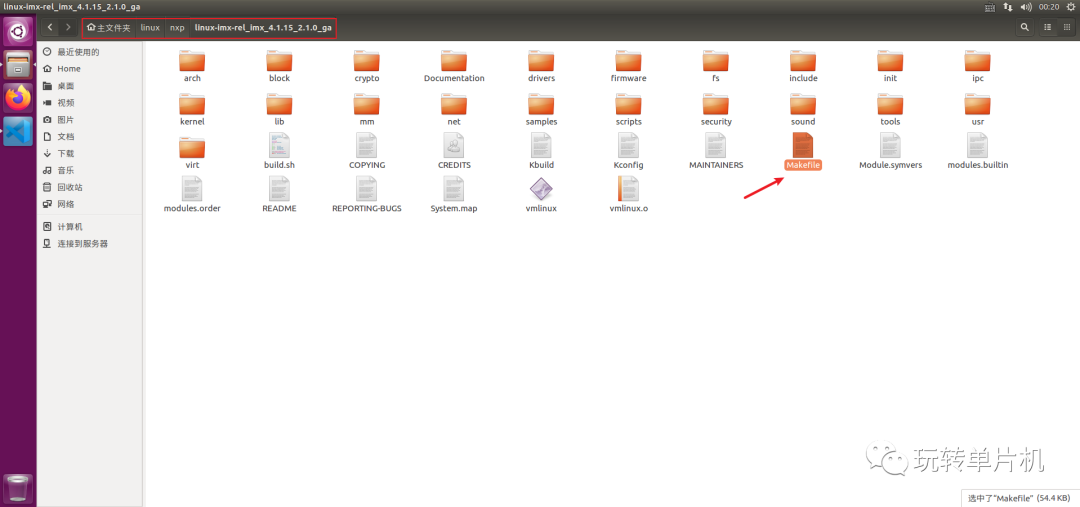
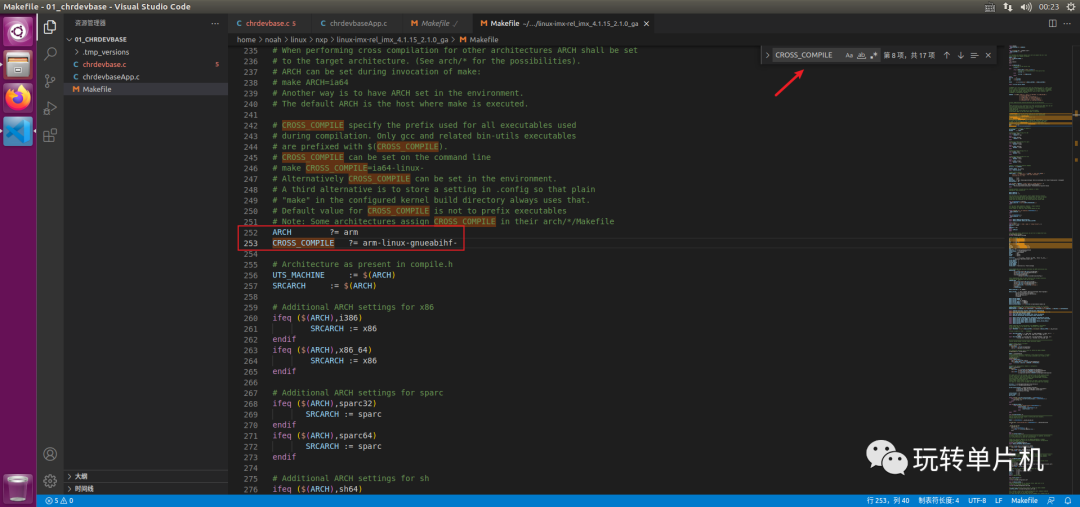
5、修改内核的Makefile文件
直接定义ARCH和CROSS_COMPILE 这两个的变量值为 arm 和 arm-linux-gnueabihf-
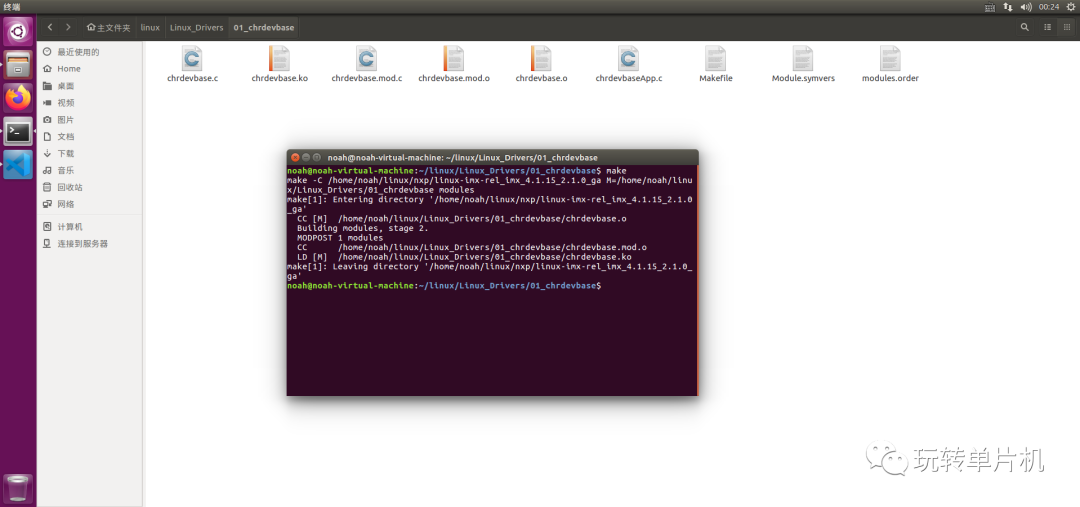
6、再次编译驱动
编译通过,会生成不少编译文件;
7、编译应用程序
应用程序只有一个文件,在ubuntu对应文件夹,直接输入指令进行编译:
arm-linux-gnueabihf-gcc chrdevbaseApp.c -o chrdevbaseApp
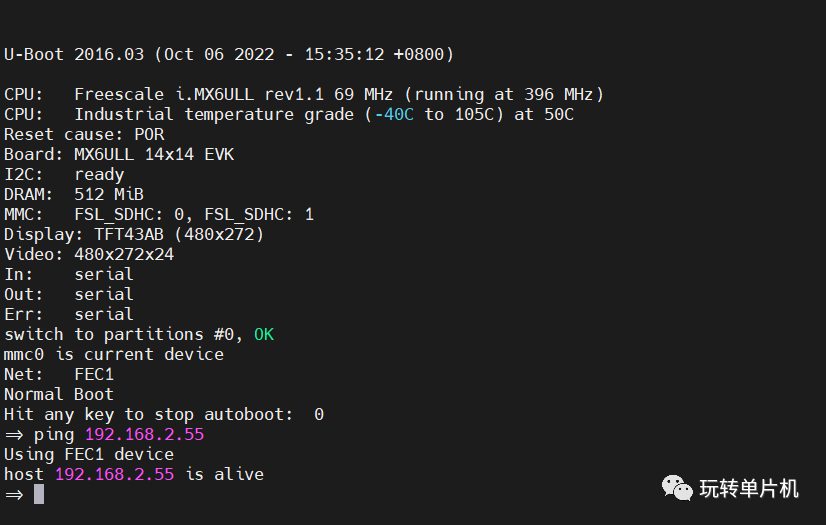
8、SD卡启动系统
插入SD卡,把拨码开关调到SD卡启动,然后ping一下网关,确认网络通畅才能继续的进行,如果ping不通就请看看前几节;
9、启动内核
在uboot界面输入下面指令启动系统,
tftp 80800000 zImage tftp 83000000 imx6ull-14x14-evk.dtb bootz 80800000 - 83000000
10、创建目录并复制驱动文件
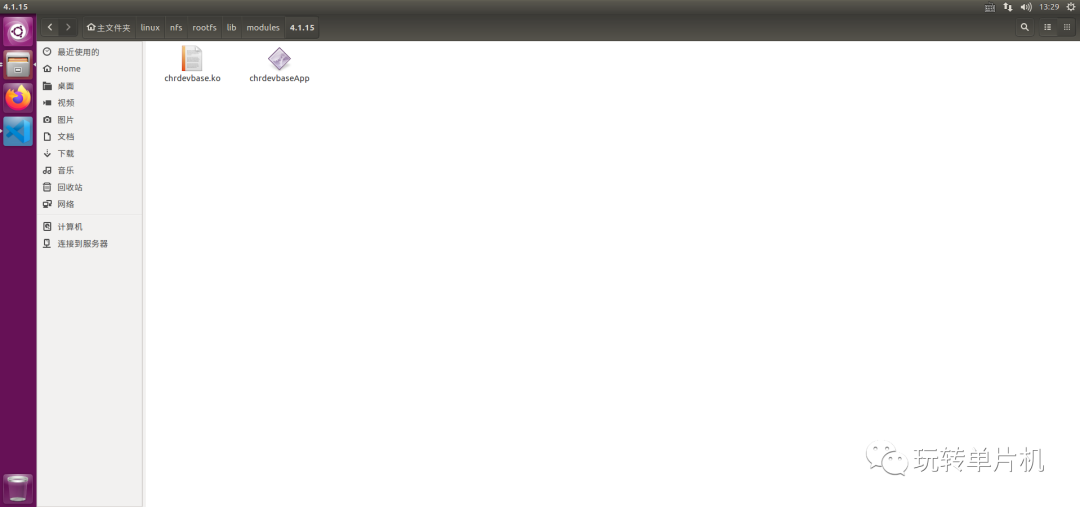
检查开发板根文件系统中有没有“/lib/modules/4.1.15”这个目录,如果没有的话自行创建。注意,“/lib/modules/4.1.15”这个目录用来存放驱动模块,使用modprobe 命令加载驱动模块的时候,驱动模块要存放在此目录下。“/lib/modules”是通用的,不管你用的什么板子、什么内核,这部分是一样的。
将 chrdevbase.ko 和 chrdevbaseAPP 复制到 rootfs/lib/modules/4.1.15 目录中:
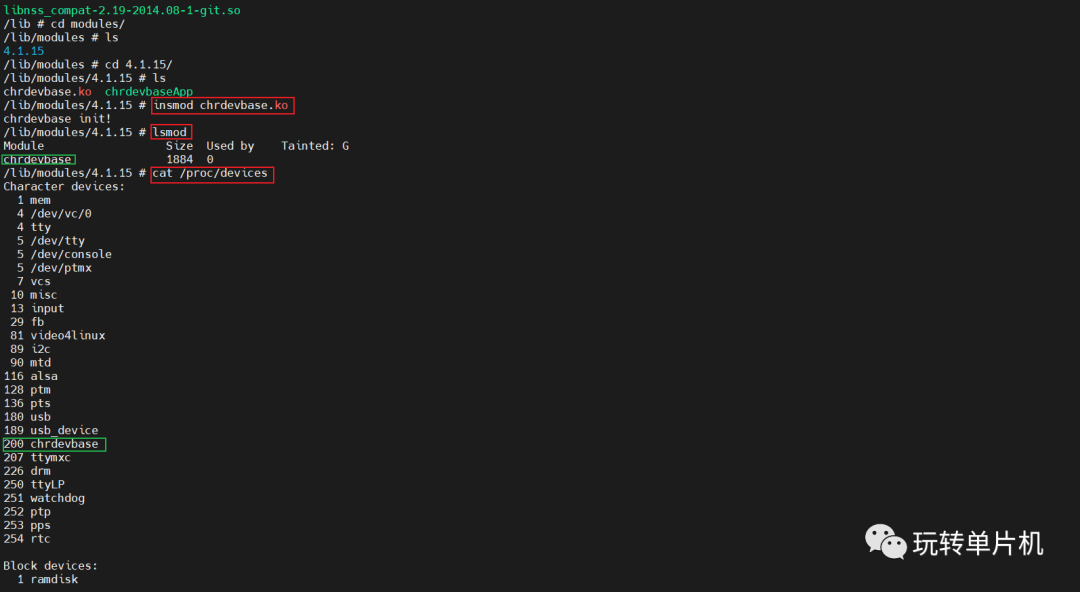
11、加载设备驱动
自制的根文件系统,有些命令是不支持的;
// 加载驱动 insmod chrdevbase.ko // 查看驱动 lsmod // 指令查看devices 信息 cat /proc/devices
效果如下图:
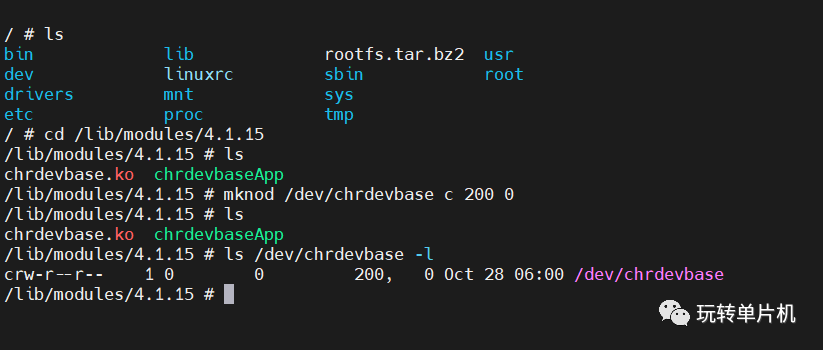
12、创建设备节点文件
驱动加载成功需要在/dev 目录下创建一个与之对应的设备节点文件,应用程序就是通过操作这个设备节点文件来完成对具体设备的操作。输入如下命令创建/dev/chrdevbase 这个设备节点文件:
mknod /dev/chrdevbase c 200 0其中“mknod”是创建节点命令,“/dev/chrdevbase”是要创建的节点文件,“c”表示这是个字符设备,“200”是设备的主设备号,“0”是设备的次设备号。创建完成以后就会存在/dev/chrdevbase 这个文件,可以使用“ls /dev/chrdevbase -l”命令查看,结果如图:
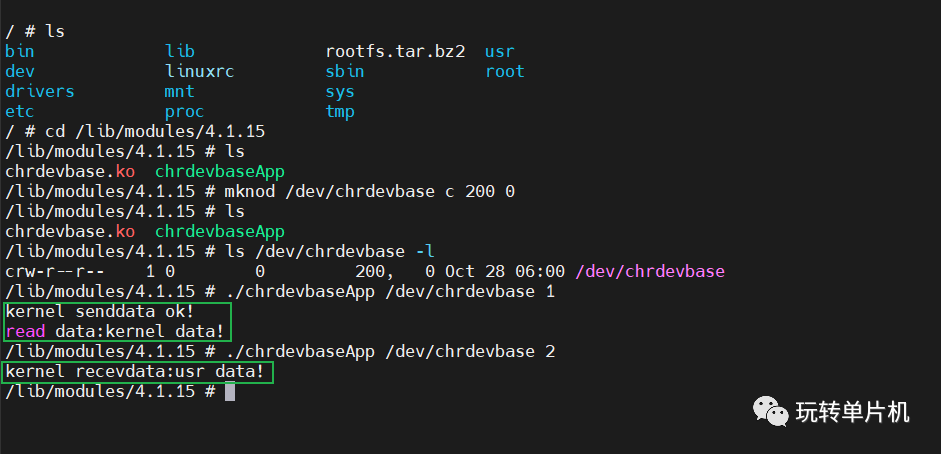
13、验证读写
使用 chrdevbaseApp 软件操作 chrdevbase 这个设备,看看读写是否正常,首先进行读操作,输入如下命令:
// 读 ./chrdevbaseApp /dev/chrdevbase 1 // 写 ./chrdevbaseApp /dev/chrdevbase 2
相关解析:
三个参数“./chrdevbaseApp”、“/dev/chrdevbase”和“1”,这三个参数分别对应 argv[0]、argv[1]和 argv[2]。
第一个参数表示运行 chrdevbaseAPP 这个软件,
第二个参数表示测试APP要打开/dev/chrdevbase这个设备。
第三个参数就是要执行的操作,1表示从chrdevbase中读取数据,2 表示向 chrdevbase 写数据。
效果如下:
14、卸载驱动模块
如果不再使用某个设备的话可以将其驱动卸载掉,命令如下:
// 卸载chrdevbase.ko rmmod chrdevbase.ko // 查看驱动 lsmod
至此,chrdevbase 这个设备的整个驱动就验证完成了,驱动工作正常。
审核编辑:汤梓红
-
i.MX6ULL 驱动开发7—按键输入捕获与GPIO输入配置与高低电平读取2022-05-24 8205
-
i.MX6ULL嵌入式Linux开发1-uboot移植初探2022-03-07 5901
-
使用i.MX6ULL开发板进行Linux根文件系统的完善2022-10-17 1345
-
移植NXP官方linux 5.4内核到i.MX6ULL开发板2022-12-19 2821
-
如何在i.MX6ULL睡眠时停止刷新LCD?2025-04-03 998
-
I.MX6ULL终结者开发板裸机仿真jlink调试2020-07-07 2657
-
i.MX6ULL开发板硬件资源2020-12-29 2373
-
初识 i.MX6ULL 寄存器2021-12-20 1620
-
I.MX6ULL无法枚举USB2514是为什么?2023-04-03 1321
-
飞凌i.MX6ULL开发板的评测,再次进阶拥有更高的性价比2020-10-27 1998
-
基于NXP i.MX6ULL处理器的FETMX6ULL-C核心板2022-04-11 1671
-
【i.MX6ULL】驱动开发4——点亮LED(寄存器版)2022-05-21 4498
-
【北京迅为】i.MX6ULL开发板移植 Debian 文件系统2022-02-10 2483
-
基于i.MX6ULL的掉电检测设计与软件测试2023-11-09 1865
-
【迅为电子】i.MX6UL和i.MX6ULL芯片区别与开发板对比2024-11-28 2544
全部0条评论

快来发表一下你的评论吧 !
