

【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】驱动AHT20并显示温湿度
描述
本文来源电子发烧友社区,作者:华仔stm32, 帖子地址:https://bbs.elecfans.com/jishu_2299452_1_1.html
在前面驱动OLED的前提下,驱动AHT20并显示到显示屏,是监测温湿度常用的手法。
1、在app目录下新建i2caht20文件夹,把oled_ssd1306.c以及oled_ssd1306.h拷贝到该目录下。
2、新建aht20.c、aht20.h,以及aht20.test.c,以及BUILD.gn三个文件。
3、aht20.c内容如下:
/*
* Copyright (C) 2021 HiHope Open Source Organization .
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
*
* limitations under the License.
*/
#include "aht20.h"
#include
#include
#include
#include "hi_i2c.h"
#include "hi_errno.h"
#define AHT20_I2C_IDX HI_I2C_IDX_0
#define AHT20_STARTUP_TIME 20*1000 // 上电启动时间
#define AHT20_CALIBRATION_TIME 40*1000 // 初始化(校准)时间
#define AHT20_MEASURE_TIME 75*1000 // 测量时间
#define AHT20_DEVICE_ADDR 0x38
#define AHT20_READ_ADDR ((0x38<<1)|0x1)
#define AHT20_WRITE_ADDR ((0x38<<1)|0x0)
#define AHT20_CMD_CALIBRATION 0xBE // 初始化(校准)命令
#define AHT20_CMD_CALIBRATION_ARG0 0x08
#define AHT20_CMD_CALIBRATION_ARG1 0x00
/**
* 传感器在采集时需要时间,主机发出测量指令(0xAC)后,延时75毫秒以上再读取转换后的数据并判断返回的状态位是否正常。
* 若状态比特位[Bit7]为0代表数据可正常读取,为1时传感器为忙状态,主机需要等待数据处理完成。
**/
#define AHT20_CMD_TRIGGER 0xAC // 触发测量命令
#define AHT20_CMD_TRIGGER_ARG0 0x33
#define AHT20_CMD_TRIGGER_ARG1 0x00
// 用于在无需关闭和再次打开电源的情况下,重新启动传感器系统,软复位所需时间不超过20 毫秒
#define AHT20_CMD_RESET 0xBA // 软复位命令
#define AHT20_CMD_STATUS 0x71 // 获取状态命令
/**
* STATUS 命令回复:
* 1. 初始化后触发测量之前,STATUS 只回复 1B 状态值;
* 2. 触发测量之后,STATUS 回复6B: 1B 状态值 + 2B 湿度 + 4b湿度 + 4b温度 + 2B 温度
* RH = Srh / 2^20 * 100%
* T = St / 2^20 * 200 - 50
**/
#define AHT20_STATUS_BUSY_SHIFT 7 // bit[7] Busy indication
#define AHT20_STATUS_BUSY_MASK (0x1<#define AHT20_STATUS_BUSY(status) ((status & AHT20_STATUS_BUSY_MASK) >> AHT20_STATUS_BUSY_SHIFT)
#define AHT20_STATUS_MODE_SHIFT 5 // bit[6:5] Mode Status
#define AHT20_STATUS_MODE_MASK (0x3<#define AHT20_STATUS_MODE(status) ((status & AHT20_STATUS_MODE_MASK) >> AHT20_STATUS_MODE_SHIFT)
// bit[4] Reserved
#define AHT20_STATUS_CALI_SHIFT 3 // bit[3] CAL Enable
#define AHT20_STATUS_CALI_MASK (0x1<#define AHT20_STATUS_CALI(status) ((status & AHT20_STATUS_CALI_MASK) >> AHT20_STATUS_CALI_SHIFT)
// bit[2:0] Reserved
#define AHT20_STATUS_RESPONSE_MAX 6
#define AHT20_RESOLUTION (1<<20) // 2^20
#define AHT20_MAX_RETRY 10
static uint32_t AHT20_Read(uint8_t* buffer, uint32_t buffLen)
{
hi_i2c_data data = { 0 };
data.receive_buf = buffer;
data.receive_len = buffLen;
uint32_t retval = hi_i2c_read(AHT20_I2C_IDX, AHT20_READ_ADDR, &data);
if (retval != HI_ERR_SUCCESS) {
printf("I2cRead() failed, %0X!n", retval);
return retval;
}
return HI_ERR_SUCCESS;
}
static uint32_t AHT20_Write(uint8_t* buffer, uint32_t buffLen)
{
hi_i2c_data data = { 0 };
data.send_buf = buffer;
data.send_len = buffLen;
uint32_t retval = hi_i2c_write(AHT20_I2C_IDX, AHT20_WRITE_ADDR, &data);
if (retval != HI_ERR_SUCCESS) {
printf("I2cWrite(%02X) failed, %0X!n", buffer[0], retval);
return retval;
}
return HI_ERR_SUCCESS;
}
// 发送获取状态命令
static uint32_t AHT20_StatusCommand(void)
{
uint8_t statusCmd[] = { AHT20_CMD_STATUS };
return AHT20_Write(statusCmd, sizeof(statusCmd));
}
// 发送软复位命令
static uint32_t AHT20_ResetCommand(void)
{
uint8_t resetCmd[] = {AHT20_CMD_RESET};
return AHT20_Write(resetCmd, sizeof(resetCmd));
}
// 发送初始化校准命令
static uint32_t AHT20_CalibrateCommand(void)
{
uint8_t clibrateCmd[] = {AHT20_CMD_CALIBRATION, AHT20_CMD_CALIBRATION_ARG0, AHT20_CMD_CALIBRATION_ARG1};
return AHT20_Write(clibrateCmd, sizeof(clibrateCmd));
}
// 读取温湿度值之前, 首先要看状态字的校准使能位Bit[3]是否为 1(通过发送0x71可以获取一个字节的状态字),
// 如果不为1,要发送0xBE命令(初始化),此命令参数有两个字节, 第一个字节为0x08,第二个字节为0x00。
uint32_t AHT20_Calibrate(void)
{
uint32_t retval = 0;
uint8_t buffer[AHT20_STATUS_RESPONSE_MAX];
memset(&buffer, 0x0, sizeof(buffer));
retval = AHT20_StatusCommand();
if (retval != HI_ERR_SUCCESS) {
return retval;
}
retval = AHT20_Read(buffer, sizeof(buffer));
if (retval != HI_ERR_SUCCESS) {
return retval;
}
if (AHT20_STATUS_BUSY(buffer[0]) || !AHT20_STATUS_CALI(buffer[0])) {
retval = AHT20_ResetCommand();
if (retval != HI_ERR_SUCCESS) {
return retval;
}
usleep(AHT20_STARTUP_TIME);
retval = AHT20_CalibrateCommand();
usleep(AHT20_CALIBRATION_TIME);
return retval;
}
return HI_ERR_SUCCESS;
}
// 发送 触发测量 命令,开始测量
uint32_t AHT20_StartMeasure(void)
{
uint8_t triggerCmd[] = {AHT20_CMD_TRIGGER, AHT20_CMD_TRIGGER_ARG0, AHT20_CMD_TRIGGER_ARG1};
return AHT20_Write(triggerCmd, sizeof(triggerCmd));
}
// 接收测量结果,拼接转换为标准值
uint32_t AHT20_GetMeasureResult(float* temp, float* humi)
{
uint32_t retval = 0, i = 0;
if (temp == NULL || humi == NULL) {
return HI_ERR_FAILURE;
}
uint8_t buffer[AHT20_STATUS_RESPONSE_MAX];
memset(&buffer, 0x0, sizeof(buffer));
retval = AHT20_Read(buffer, sizeof(buffer)); // recv status command result
if (retval != HI_ERR_SUCCESS) {
return retval;
}
for (i = 0; AHT20_STATUS_BUSY(buffer[0]) && i < AHT20_MAX_RETRY; i++) {
// printf("AHT20 device busy, retry %d/%d!rn", i, AHT20_MAX_RETRY);
usleep(AHT20_MEASURE_TIME);
retval = AHT20_Read(buffer, sizeof(buffer)); // recv status command result
if (retval != HI_ERR_SUCCESS) {
return retval;
}
}
if (i >= AHT20_MAX_RETRY) {
printf("AHT20 device always busy!rn");
return HI_ERR_SUCCESS;
}
uint32_t humiRaw = buffer[1];
humiRaw = (humiRaw << 8) | buffer[2];
humiRaw = (humiRaw << 4) | ((buffer[3] & 0xF0) >> 4);
*humi = humiRaw / (float)AHT20_RESOLUTION * 100;
uint32_t tempRaw = buffer[3] & 0x0F;
tempRaw = (tempRaw << 8) | buffer[4];
tempRaw = (tempRaw << 8) | buffer[5];
*temp = tempRaw / (float)AHT20_RESOLUTION * 200 - 50;
// printf("humi = %05X, %f, temp= %05X, %frn", humiRaw, *humi, tempRaw, *temp);
return HI_ERR_SUCCESS;
}
)<>)<>)<>
4、aht20.h内容如下:
/*
* Copyright (C) 2021 HiHope Open Source Organization .
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
*
* limitations under the License.
*/
#ifndef AHT20_H
#define AHT20_H
#include
uint32_t AHT20_Calibrate(void);
uint32_t AHT20_StartMeasure(void);
uint32_t AHT20_GetMeasureResult(float* temp, float* humi);
#endif // AHT20_H
5、aht20_test.c内容如下:
/*
* Copyright (C) 2021 HiHope Open Source Organization .
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
*
* limitations under the License.
*/
#include "aht20.h"
#include
#include
#include "ohos_init.h"
#include "cmsis_os2.h"
#include "hi_gpio.h"
#include "hi_io.h"
#include "hi_i2c.h"
#include "oled_ssd1306.h"
void Aht20TestTask(void* arg)
{
(void) arg;
uint32_t retval = 0;
char str_temp[12];
char str_Humi[12];
hi_io_set_func(HI_IO_NAME_GPIO_13, HI_IO_FUNC_GPIO_13_I2C0_SDA);
hi_io_set_func(HI_IO_NAME_GPIO_14, HI_IO_FUNC_GPIO_14_I2C0_SCL);
hi_i2c_init(HI_I2C_IDX_0, 400*1000);
OledInit();
OledFillScreen(0x00);
OledShowString(26, 0, "AHT20-TEST!", FONT8x16);
retval = AHT20_Calibrate();
printf("AHT20_Calibrate: %drn", retval);
while (1) {
float temp = 0.0, humi = 0.0;
retval = AHT20_StartMeasure();
printf("AHT20_StartMeasure: %drn", retval);
retval = AHT20_GetMeasureResult(&temp, &humi);
sprintf(str_temp,"TEMP:%.2f",temp);
sprintf(str_Humi,"HUMI:%.2f",humi);
printf("AHT20_GetMeasureResult: %d, temp = %.2f, humi = %.2frn", retval, temp, humi);
OledShowString(26,2,str_temp,FONT8x16);
OledShowString(26,4,str_Humi,FONT8x16);
sleep(1);
}
}
void Aht20Test(void)
{
osThreadAttr_t attr;
attr.name = "Aht20Task";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = 4096;
attr.priority = osPriorityNormal;
if (osThreadNew(Aht20TestTask, NULL, &attr) == NULL) {
printf("[Aht20Test] Failed to create Aht20TestTask!n");
}
}
APP_FEATURE_INIT(Aht20Test);
7、BUILD.gn:
#Copyright (C) 2021 HiHope Open Source Organization .
#Licensed under the Apache License, Version 2.0 (the "License");
#you may not use this file except in compliance with the License.
#You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
#Unless required by applicable law or agreed to in writing, software
#distributed under the License is distributed on an "AS IS" BASIS,
#WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
#See the License for the specific language governing permissions and
#
#limitations under the License.
static_library("i2cd_emo") {
sources = [
"aht20_test.c",
"aht20.c",
"oled_ssd1306.c"
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/components/cmsis/2.0",
"//base/iot_hardware/peripheral/interfaces/kits",
"//device/hisilicon/hispark_pegasus/sdk_liteos/include"
]
}
8、修改app/BUILD.gn如下:
import("//build/lite/config/component/lite_component.gni")
lite_component("app") {
features = [
"i2caht20:i2cd_emo",
]
}
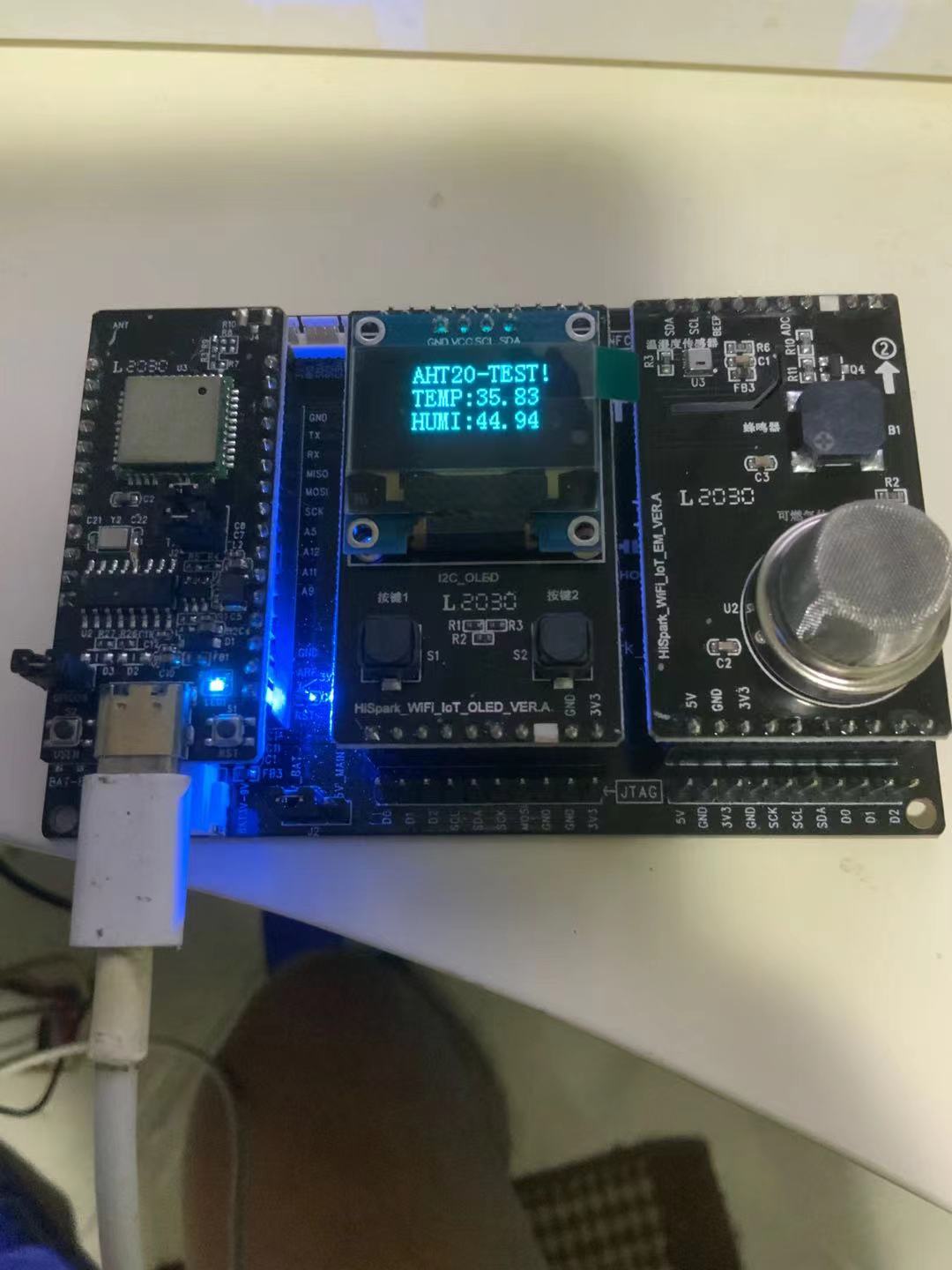
然后就可以编译下载了。
运行效果如下图:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】播放音乐2022-10-31 2067
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】TCP上传温湿度2022-08-21 1494
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】OpenHarmony wifi连网2022-08-20 5239
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】驱动AHT20并显示温湿度2022-08-13 6362
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】CHAPTER 1 ---- 开箱报告2020-12-31 2634
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】跟着小哈一起读AHT20温湿度传感器驱动源码2020-11-25 2551
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】开发套件初探2020-11-22 2637
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连载】2-从DEMO中学习代码与控制2020-11-07 3669
-
【HarmonyOS HiSpark Wi-Fi IoT HarmonyOS 智能家居套件试用 】基于HiSpark Wi-Fi IoT HarmonyOS 智能家居套件的温控面板2020-10-29 2043
-
【HarmonyOS HiSpark Wi-Fi IoT套件】HarmonyOS IoT 硬件开发案例分享2020-10-27 1143
-
【HarmonyOS HiSpark Wi-Fi IoT 套件】(一)开箱2020-10-25 1546
-
【HarmonyOS HiSpark Wi-Fi IoT 套件试用连连载】开箱报告2020-09-29 1747
全部0条评论

快来发表一下你的评论吧 !
