

MEMS惯性传感器的坐标系定义
电子说
1.4w人已加入
描述
地惯性坐标系圆心一般取地心,X轴在地球赤道平面指向春分点,Z轴与地球极轴重合指向北极,Y轴与XZ两轴构成右手直角坐标系。惯性元件陀螺仪和加速度计输出的角运动和线运动就是相对于惯性系而言的。
地心地固坐标系 (ECEF, e-frame)
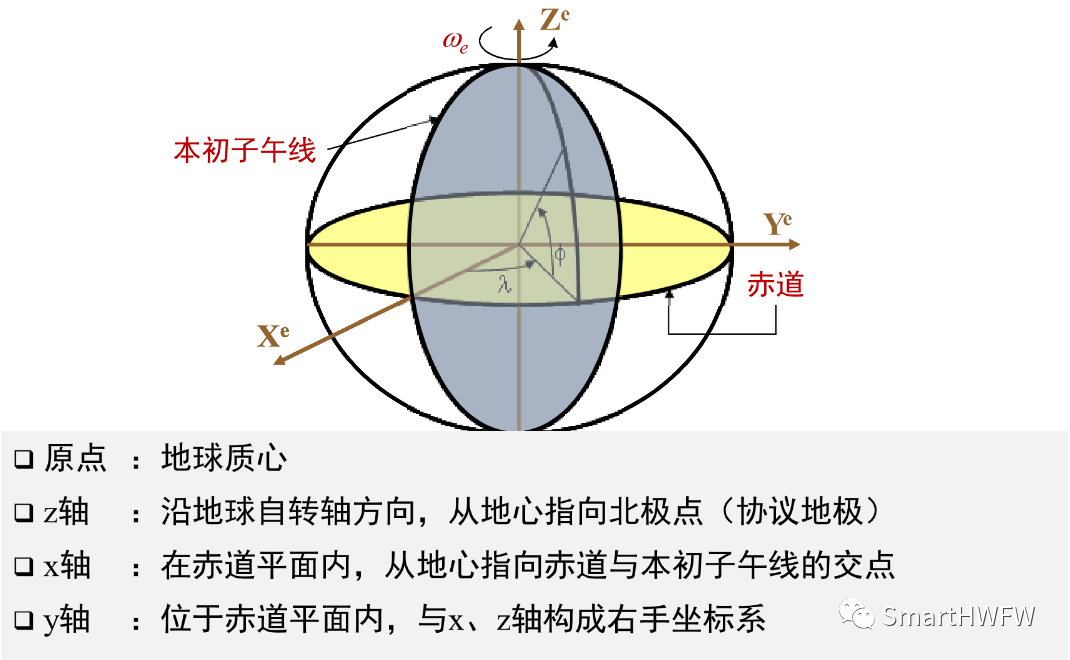
地球坐标系与地球固连,随地球一起转动。X轴在赤道平面与本初子午面的交线上,Z轴沿极轴(地轴)方向,Y轴在赤道平面内与X、Z轴构成右手直角坐标系。 地心地坐标系相对于惯性坐标系的角运动就是地球自转的角速率。
导航坐标系 (n-frame)
又称为当地水平坐标系、地理坐标系 (g系, geographic frame)
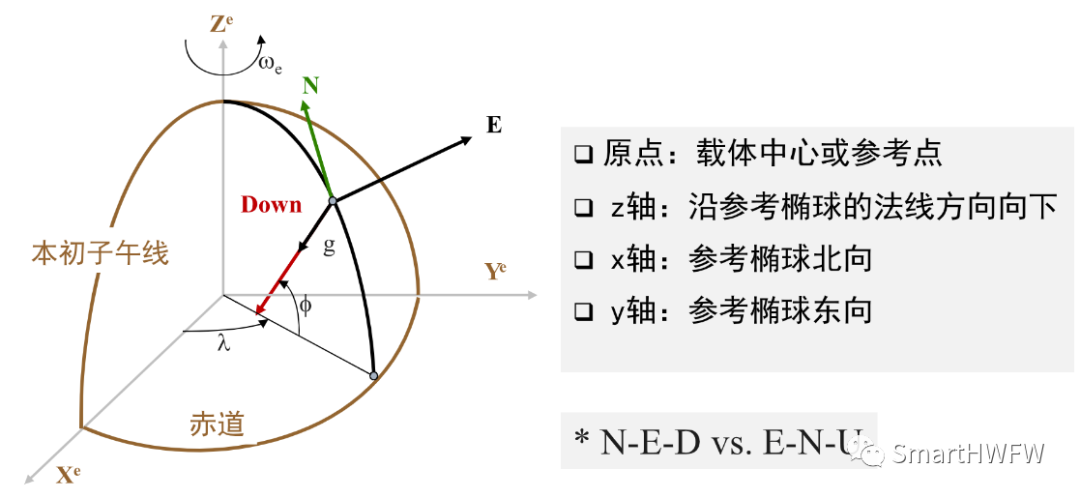
其原点为载体所在的点,X轴沿当地纬线指东,Y轴沿当地子午线指北,Z轴沿当地地理轴线指上并与X、Y轴构成右手直角坐标系。XY轴构成的平面即为当地水平面,YZ轴构成平面为当地子午面。 按坐标轴不同取法,可分为“东、北、天”即ENU或“北、东、地”/NED等。通常取用东北天地理坐标系作为导航的参考坐标系,能够适应除极区外的导航应用。
载体坐标系 (b-frame)
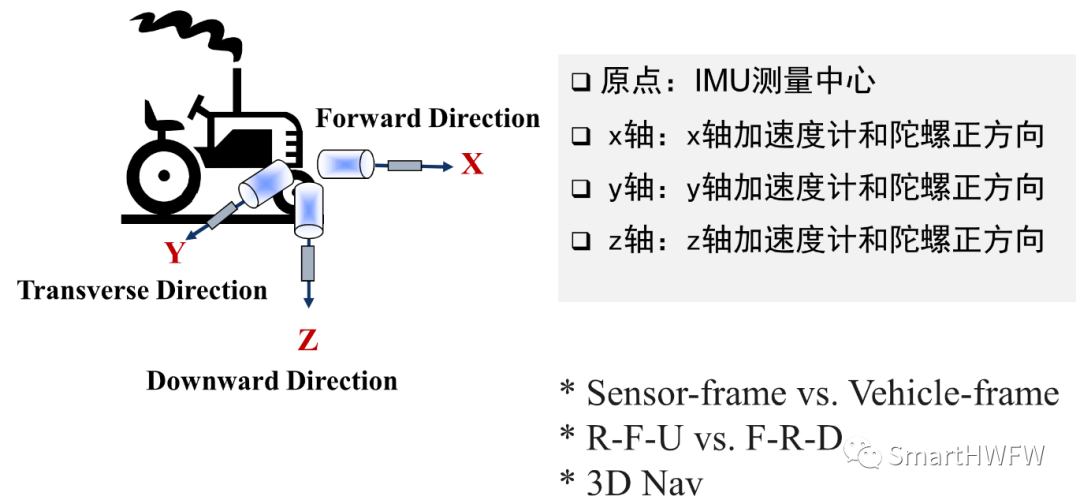
其原点与载体质心重合。机体系X轴沿运载体横轴线指右,Y轴沿纵轴指前,Z轴沿运载体竖向并与X、Y轴构成右手直角坐标系。 坐标轴也有其他取法,如X轴沿载体纵轴指前,Y轴指右,Z轴沿载体竖轴与X、Y轴构成右手直角坐标系。
审核编辑:郭婷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- �
-
装配MEMS惯性传感器的实用方法2018-11-12 2044
-
如何处理四轴东北天坐标系和北东地坐标系不同时传感器输出的数据方向?2019-07-16 5546
-
CAD制图软件新手攻略:坐标系及标注坐标2020-09-23 1938
-
介绍坐标系和机器人之间的纽带即连杆坐标系2021-09-01 1580
-
多传感器坐标系跟踪的实际状况2009-07-13 1044
-
什么是坐标系2009-12-31 5146
-
OPENGL坐标系介绍 世界坐标系和当前绘图坐标系区别2018-05-04 13466
-
如何将传感器坐标系下的数据转换到自车坐标系?2018-08-06 17416
-
关于工业机器人的四类坐标系概述2018-10-05 29046
-
在机器人控制系统中定义了下列坐标系2022-06-02 6127
-
自动驾驶各个坐标系2023-06-01 861
-
三坐标如何建立坐标系?2023-02-17 14890
-
世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系2023-07-03 16194
-
深度剖析机器人的四大坐标系2023-11-13 3399
-
应用卫星通信领域的一个坐标转换过程—机体坐标系与ENU坐标系的转换2023-12-27 8812
全部0条评论

快来发表一下你的评论吧 !
