

基于Transformer的越野场景可通行区域检测模型OFF-Net
描述
可通行区域检测对于自动驾驶车辆的环境感知和路径规划至关重要。过去十年基于学习的可通行区域检测算法取得了很大的成功,但是基本上都是关注城市场景的可通行区域检测。相比于规则的城市场景道路,越野场景道路复杂多变,可通行区域检测更加困难,另外目前缺少开源的越野场景可通行检测数据集和算法基准。因此,本文开源第一个覆盖多种越野场景的可通行区域检测数据集,ORFD。ORFD采集了包括草原、林地、农田和乡村道路等不同场景道路,覆盖晴天、雨天、雾天和雪天等不同无人车行驶天气状况,包含强光、日光、微光和黑暗等光照条件。ORFD一共有12198帧激光雷达点云和图像对数据,在图像视角进行了标注,包含三种类别:可通行区域、不可通行区域和不可到达区域(如天空)。我们同时还提出了一个基于Transformer的越野场景可通行区域检测模型OFF-Net,利用交叉注意力机制自适应融合点云和图像的多模态信息。数据集和基准代码下载链接:https://github.com/chaytonmin/Off-Road-Freespace-Detection。
主要工作与贡献
我们开源了第一个越野场景可通行区域检测数据集ORFD,包括草原、林地、农田和乡村道路等不同场景道路,覆盖晴天、雨天、雾天和雪天等不同无人车行驶天气状况,包含强光、日光、微光和黑暗等光照条件。
我们提出了一个越野场景可通行区域检测基准算法OFF-Net,采用Transformer结构聚合全局信息,设计cross-attention自适应挖掘点云和图像的多模态信息。
我们的越野场景可通行区域检测数据集ORFD和算法基准OFF-Net,有助于提高无人车在越野场景的自主行使能力。
算法流程
城市场景道路和越野场景道路对比
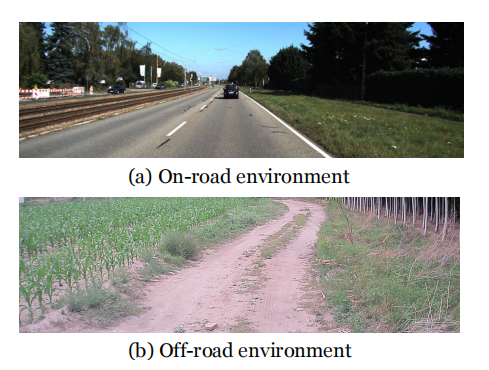
图1 (a) 城市场景道路有清晰的道路边界 (b)越野场景可通行区域难以准确定义。
数据采集装置
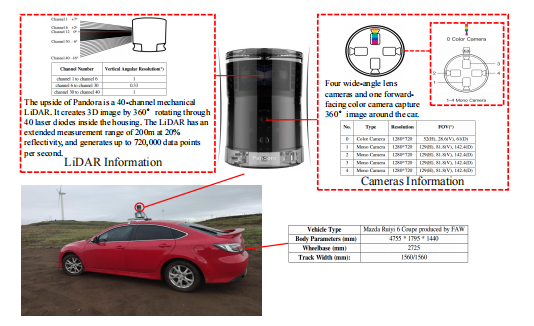
图2 越野场景可通行区域检测数据集ORFD采集装置:Pandora 40线的激光雷达,相机和激光雷达一体。联合标注激光雷达和相机。
越野场景可通行区域检测数据集ORFD
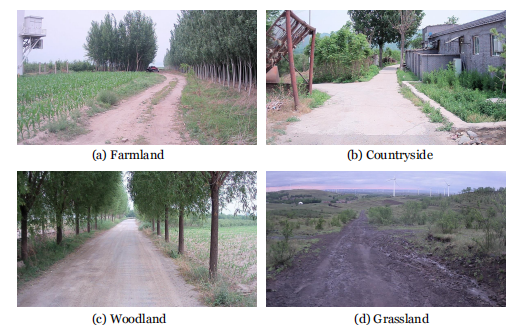

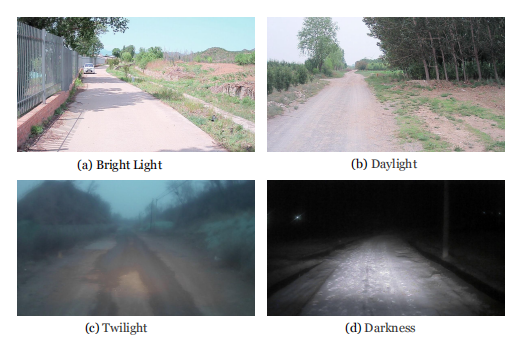
图3 越野场景可通行区域检测数据集ORFD,包括草原、林地、农田和乡村道路等不同场景道路,覆盖晴天、雨天、雾天和雪天等不同无人车行驶天气状况,包含强光、日光、微光和黑暗等光照条件。采集了30段道路数据,一共有12198帧激光雷达点云和图像对数据。在图像视角进行了标注,包含三种类别:可通行区域、不可通行区域和不可到达区域(如天空)。
数据集划分

越野场景可通行区域检测基准算法OFF-Net
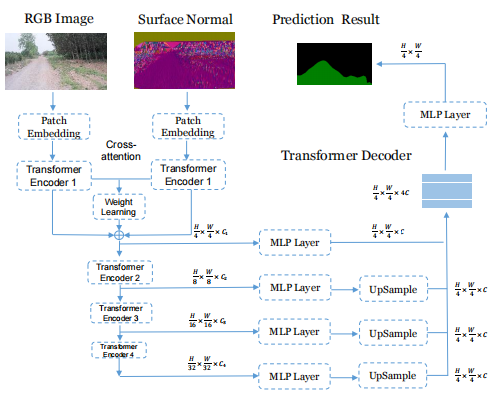
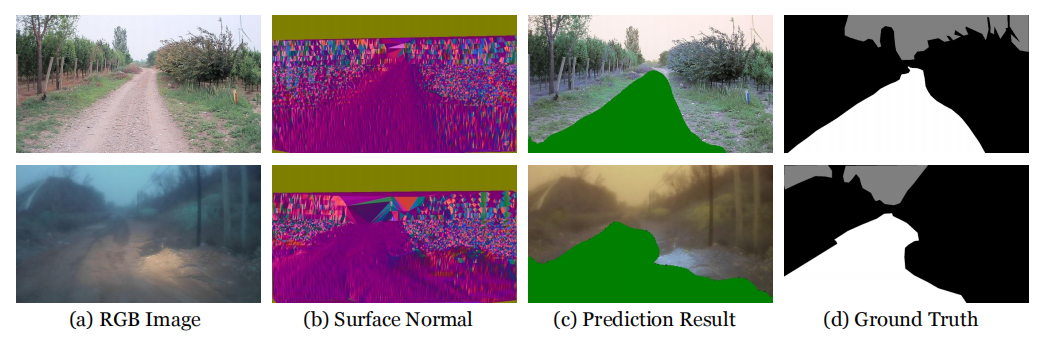
图4 提出的越野场景可通行区域检测基准算法OFF-Net。首先将激光雷达点云投到相机视角得到深度图,然后计算得到法向量图,再利用Transformer网络融合法向量图和图像,得到道路分割结果。
实验结果

审核编辑:郭婷
-
你了解在单GPU上就可以运行的Transformer模型吗2022-11-02 2183
-
基于肤色模型和区域特征的人脸检测方法2009-04-15 823
-
如何使用Transformer来做物体检测?2021-04-25 3526
-
使用跨界模型Transformer来做物体检测!2021-06-10 3123
-
基于可拓路径的密集人群环境通行策略综述2021-06-15 720
-
OpenVINO2021.4版本中场景文字检测与识别模型的推理使用2021-08-26 3817
-
Microsoft使用NVIDIA Triton加速AI Transformer模型应用2022-04-02 2713
-
基于 Transformer 的分割与检测方法2023-07-05 2311
-
transformer模型详解:Transformer 模型的压缩方法2023-07-17 3867
-
基于Transformer的目标检测算法2023-08-16 1201
-
基于transformer和自监督学习的路面异常检测方法分享2023-12-06 3271
-
基于Transformer模型的压缩方法2024-02-22 1665
-
使用PyTorch搭建Transformer模型2024-07-02 3682
-
Transformer语言模型简介与实现过程2024-07-10 4251
-
如何使用MATLAB构建Transformer模型2025-02-06 6854
全部0条评论

快来发表一下你的评论吧 !
