

【试用体验】小河狸创客格物开发板试用体验—避障车的制作与功能实现
描述
为例停靠的安全,多数都为爱车配置了倒车雷达,这里介绍的避障车也有同样的功效,它在车前、车后均配备了光线传感器,当有障碍时,光线传感器一旦得到感知,则马上控制停车。避障车的外观如图1所示。
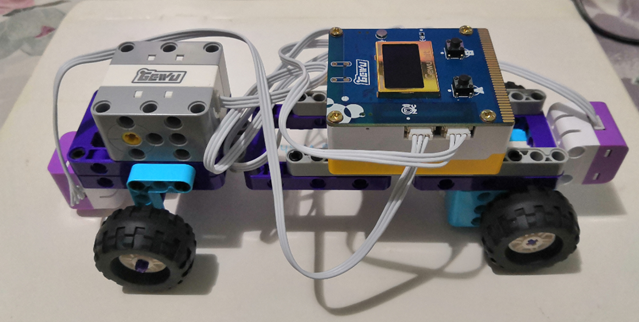
图1 避障车
结构制作
避障车的结构制作可参考升降车的制作,并去除升降结构。如何在车的前后端为其添加光线传感器,所用连接组件为4个

光线传感器的控制线,则是连接到P1和P2接口。
此外,升降车的前端设计的比较高,可将L型的支架向上移一层;并将前轮的横轴也上提一个孔位,这样车体的整体就相对比较平稳了。
程序编写
1)基本控制型
基本控制型的控制为,当小车上电后即开始启动,只有在遇到障碍时才暂时停下,遇到障碍解除,小车就继续前行,其程序如图2所示。
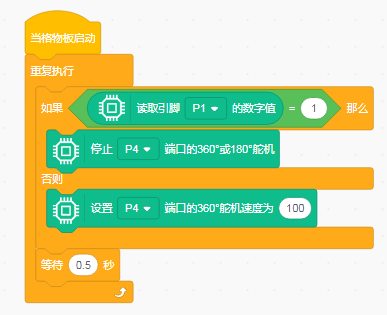
图2 控制程序
2)行进控制型
行进控制型是在基本控制型的基础上添加了显示功能,可直接显示小车所处的运行状态。

图3 显示功能
此外,还添加了按键控制功能,当按下A键后,小车向前行驶;一旦遇到障碍,则自动停车。若按下B键,则小车向后倒车,一旦遇到障碍,则自动停车。

图4 自动停车
是不是这样就有了驾驶的感觉,其功能程序如图5所示。
当然,如果感兴趣的话,还可以为它添加按喇叭提示周围注意的效果。
其实,还可以尝试用180度的舵机来控制方向,将2个光线传感器都放置在车的前端,如何通过配备左右的障碍情况,来决定车的左右转向处理。
可惜组件中没有LED模块,否则可以用光线强度传感器来感知外部的亮度,以决定是否要自动点亮车灯来照明。
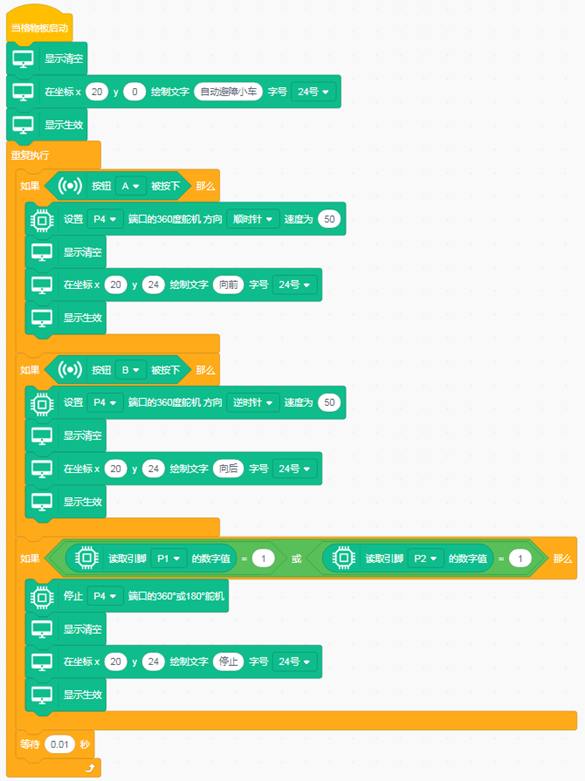
图5 控制程序
本文由电子发烧友社区发布,转载请注明以上来源。如需社区合作及入群交流,请添加微信EEFans0806,或者发邮箱liuyong@huaqiu.com。
原文标题:【试用体验】小河狸创客格物开发板试用体验—避障车的制作与功能实现
文章出处:【微信公众号:电子发烧友论坛】欢迎添加关注!文章转载请注明出处。
-
【小河狸创客格物开发板试用体验】体验自动扫地机器人2022-11-30 3225
-
【小河狸创客格物开发板试用体验】使用App Inventor遥控转向小车2022-11-25 2286
-
【小河狸创客格物开发板试用体验】纸飞机弹射器2022-11-12 1500
-
【小河狸创客格物开发板试用体验】小河狸格物开发板体验之旅12022-11-10 3360
-
【小河狸创客格物开发板试用体验】小河狸格物开发板体验之旅2022-11-09 2500
-
【小河狸创客格物开发板试用体验】开篇-小河狸格物板传感器测试及显示2022-11-02 5069
-
小河狸创客格物开发板体验:智能升降车2022-10-31 7296
-
【小河狸创客格物开发板试用体验】避障车的制作与功能实现2022-10-28 6761
-
【小河狸创客格物开发板试用体验】升降车及其控制2022-10-27 1856
-
【小河狸创客格物开发板试用体验】OLED屏的使用2022-10-26 2289
-
【小河狸创客格物开发板试用体验】开发环境的构建及基本测试2022-10-24 2254
-
【小河狸创客格物开发板试用体验】萌萌开箱2022-10-22 2797
-
【OpenHarmony专题】小河狸创客格物开发板免费试用2022-09-15 3416
全部0条评论

快来发表一下你的评论吧 !
