

基于软件无线电架构设计了一套GPS信号控制系统
描述
摘 要 :文中基于软件无线电架构设计了一套 GPS 信号控制系统。系统用于辅助无人机操控教学,为无人机教学区域内提供指定的 GPS 环境,即“无 GPS”环境与“伪 GPS”环境。学生在不同的 GPS 环境中进行操控无人机的训练,帮助他们掌握在复杂电磁环境中操控无人机的技能。经实测验证,系统能够控制指定区域的 GPS 电磁环境,具备辅助无人机操控教学的功能。
0 引 言
近年来,我国无人机产业发展迅猛。伴随无人机市场的扩大,我国大专院校陆续开设了无人机相关专业。在专业建设方面,高职院校着重无人机组装、维护以及操作等技能的培养,将学生培养成为合格的无人机“飞手”是无人机专业重要的人才培养方向 [1-2]。
随着无线产品的使用越来越多,在某些区域甚至还出现了违规架设“无人机反制”设备的情况。这些因素致使无人机作业时所处的电磁环境越来越复杂。复杂的电磁环境会影响无人机的通信,致使无人机无法顺利接收 GPS 信号。失去GPS 信号的无人机易被非法捕获,还会发生坠机并引发次生灾害 [3-4]。这不仅会造成财产损失,还会对公共秩序带来威胁。因此,无人机“飞手”学员在校接受无人机操控训练时,应引入在复杂 GPS 环境下操控无人机的教学环节,帮助学员合理应对无人机作业时 GPS 信号不正常的情况,避免事故发生。
本文设计了一套 GPS 信号控制系统,系统基于软件无线电理念开发,硬件部分包括通用硬件平台 Hack RF 和功率放大器模块 ;软件部分主要使用 GNU Radio。系统能在无人机操控教学区域内提供 2 种 GPS 环境 :(1)“无 GPS”环境 ;(2)“伪 GPS”环境。系统集成度高、操作简单,能有效帮助无人机专业学生提高操控无人机的实战能力。
1 系统介绍
本文设计的 GPS 信号控制系统框架如图 1 所示,系统分为基带波形单元和信号发射单元 2 部分。
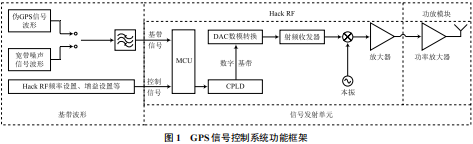
(1)基带波形单元生成宽带噪声信号和“伪 GPS”信号等 2 种波形的基带数据。其中,“伪 GPS”信号的算法设计、数据制作由 GPS 模拟器完成 ;宽带噪声信号的算法设计、数据制作以及两种波形的调用由 GNU Radio 完成。
(2)信号发射单元由 Hack RF 和功率放大器模块组成,实现数模转换、上变频、增益控制以及功率放大等功能。
1.1 GNU Radio 介绍
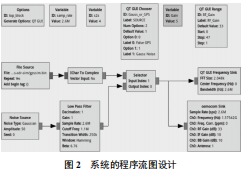
GNU Radio 是一个开源的软件无线电软件平台,由 C++语言和 Python 语言混合编写而成。该平台提供了通信系统常用的信号源模块、信号处理模块以及与通用软件无线电硬件外设的接口。GNU Radio 提供图形化设计界面,降低了软件算法开发难度。本系统的软件开发以流图设计的方式进行,程序实现的功能包括 :GPS 波形部署、信号处理、硬件平台参数配置以及人机交互。GPS 信号控制系统的程序流图设计如图 2 所示。
1.2 Hack RF 介绍
Hack RF 是软件无线电的通用硬件平台,工作频段为30 MHz ~ 6 GHz,最大采样率为 20 MS/s。模块支持半双工通信,其硬件结构如图 3 所示。本设计中,Hack RF 将软件平台生成的数字基带信号转换为模拟信号,对模拟信号进行上变频、放大以及增益控制,信号输出给功率放大器模块。

1.3 功率放大器模块介绍
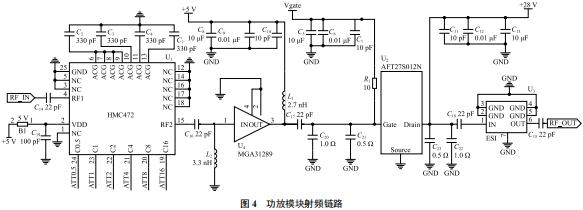
功率放大器模块将 Hack RF 输出的射频信号进行功率放大,其射频链路设计如图 4 所示。模块工作频率为1 575.42 MHz,载频放大增益为 30.5 dB,输出信号功率为34.5 dBm。
2 系统原理
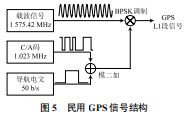
GPS 信号控制系统在指定区域提供多种 GPS 环境,关键技术是控制区域内终端设备接收到的 GPS 信号。GPS 信号包括载波、测距码以及导航电文,民用 GPS 信号的相关信息是公开的,其信号结构如图 5 所示。其中,载波信号的频率为 1 575.42 MHz ;调制方式是 BPSK ;测距码为 C/A码,用于卫星多址、卫星信号捕获、测距以及提高系统的抗干扰能力 ;导航电文包含卫星星历、时钟修正、历书等重要信息 [5-10]。
2.1 “无 GPS”原理
系统向指定区域辐射中心频率为 1 575.42 MHz 的宽带噪声信号,噪声信号带宽为 GPS 民用通信带宽 2.046 MHz,功率远远大于终端设备接收的正常 GPS 信号功率。GPS 信号被淹没于宽带噪声之中,接收机无法解调出位置信息,系统覆盖区域内的终端如同进入“无 GPS 信号”区域。
2.2 “伪 GPS”原理
系统利用民用 GPS 信号的载频、调制方式、C/A 码序列、导航电文等信息公开的特点,仿造与 GPS 信号结构完全相同的“伪 GPS”信号。“伪 GPS”信号包含的位置信息是系统“预设位置”信息。在指定区域内,系统在 1 575.42 MHz 载频上辐射“伪 GPS 信号”,以功率优势压制真实 GPS 信号,无人机获取功率更强、信噪比更优的“伪 GPS 信号”,并解调出位置信息为系统“预设位置”的坐标,系统覆盖区域内的终端解调出的 GPS 信息是“错误的信息”[11-12]。
3 系统方案设计
系统实物如图 6 所示。设计分为 3 部分 :波形设计、Hack RF 配置以及功率放大器模块设计
3.1 波形设计
3.1.1 宽带噪声波形设计
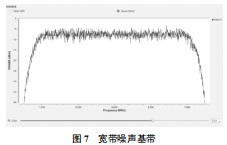
宽带噪声信号波形由 GUN Radio 流图设计生成 :程序流图中的“Noise Source”是噪声源模块,该模块装载高斯白噪声算法,输出高斯白噪声基带数据 ;“Low Pass Filter”是低通滤波器模块,该模块被用来限制高斯白噪声信号的带宽。宽带噪声基带信号的波形、带宽等信息在“Qt GUIFrequency Sink”模块中观测,如图 7 所示。
3.1.2 伪 GPS 信号波形设计
“伪 GPS 信号”的波形设计由 GPS 模拟器(gps-sdr-sim)和 GUN Radio 共同设计生成。“gps-sdr-sim”负责产生基带数据 ;GNU Radio 负责基带数据引入流图中的无线电系统。
“gps-sdr-sim”是开源的 GPS 数据仿真器,能根据星历文件、预设位置坐标等信息计算出系统运行所需的扩频码相位、载波相位、电离层延迟、对流层延迟、多普勒频移等数据,生成“伪导航电文”;伪导航电文序列与伪随机序列进行“模二加”运算,得到一个卫星的“伪导航数据”;模拟器一次能模拟多个 GPS 卫星的伪数据,并将它们按时序封装成帧,以“BIN 文件”保存下来。
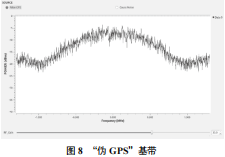
程序流图中的“File Source”模块将“BIN 文件”引入软件无线电系统,“IChar To Complex”模块将“BIN 文件”中的字符型数据转换为复数型数据,成为通用硬件平台 HackRF 可识别的基带信号。同样,“伪 GPS 信号”的波形、带宽等信息可在“Qt GUI Frequency Sink”模块中观测,如图 8所示。
3.2 Hack RF 配置
Hack RF 的配置在程序流图中的“osmocom Sink”模块中完成。该模块不仅将基带波形单元生成的基带数据发送给Hack RF,还对 Hack RF 的信号频率、射频增益、功率放大器选择等进行配置。本系统中的 Hack RF 工作于发射模式,主要工作流程如下 :
(1)模数转换器 MAX5864 将数字基带信号转换为模拟基带信号 ;
(2)射频收发器 MAX2837 将模拟基带信号调制到频率为 2.6 GHz 的中频信号,并对中频信号提供 0 ~ 47 dB 的增益控制 ;
(3)混频器 RFFC5072 将中频信号变频到载波频率1 575.42 MHz ;
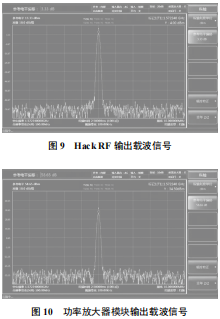
(4)通过设置单刀三掷开关 SKY13317,混频器输出的信号送给放大器 MGA-81563 进行放大,放大器增益为 12.4 dB。由于射频放大芯片 MGA-81563 的输出 P1dB 压缩点为14.8 dBm,为保证输出信号的线性指标,配置射频收发器MAX2837 中的数控增益单元为 33 dB,最终 Hack RF 输出载波信号功率为 4 dBm,如图 9 所示。
3.3 功率放大器设计
方案中的功率放大器模块为自主设计,射频链路如图 4所示。HMC472 是数控射频衰减器,受单片机控制,负责功放模块的增益控制,本设计中衰减值设置为 7.5 dB ;MGA-31289 是宽带射频放大器,在 1 575.42 MHz 频段提供 18 dB增益 ;AFT27S012N 是功率 LDMOS,增益为 20 dB。模块采用功率回退方案,在功率放大器 AFT27S012N 的 P1dB 压缩点为 41 dBm 的情况下,输出载波信号功率为 34.5 dBm,如图 10 所示。
4 系统验证
本文设计的 GPS 信号控制系统通过“GPS 工具”和“地图工具”来验证其功能,其中地图工具使用“高德地图”。实验中,将终端分别放置于正常 GPS 环境、“无 GPS”环境以及“伪 GPS”环境等。通过终端的“GPS 工具”和“地图工具”读取 GPS 卫星状态、经纬度信息以及地图位置信息来验证系统功能,测试结果如下 :
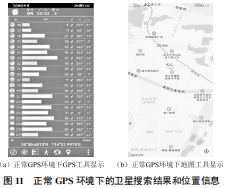
(1)正常 GPS 环境下,终端 GPS 卫星搜索结果和位置信息如图 11 所示 :GPS 工具显示搜索到 GPS 卫星 8 颗,定位坐标为 30° 30.6813'N,114° 21.9975'E ;地图工具显示当前位置为“湖北交通职业技术学院”。
(2)GPS 信号控制系统提供“无 GPS 信号”环境,终端上的 GPS 卫星搜索结果和位置信息如图 12 所示 :GPS 工具显示搜索到 GPS 卫星 0 颗,无定位坐标 ;地图工具显示“定位失败”。

(3)GPS 信号控制系统提供“伪 GPS”环境,系统“预设位置”编辑为“南岳衡山风景区”,终端 GPS 卫星搜索结果和位置信息如图 13 所示 :GPS 工具显示搜索到 GPS 卫星12 颗 ;GPS 定位坐标为 27° 15.9033'N,112° 43.1158'E ;地图工具显示当前位置为“南岳衡山风景区”。
由以上验证可知,本文设计的 GPS 信号控制系统可在覆盖区域内使终端处于“无 GPS”状态 ;也可以使终端接收到“伪GPS”信号,并解析出错误的位置信息。验证表明,系统设计成功。
5 结 语
我团队设计了一套基于软件无线电的 GPS 信号控制系统,文中详细介绍了系统的架构和设计原理。经验证,系统能提供指定的 GPS 环境,对无人机操控教学具有辅助作用。另外,本设计及相关技术也可以应用于 GPS 信号模拟、无人机反制等相关领域的设计开发,具有良好的拓展性。

审核编辑 :李倩
-
什么是软件无线电?2022-04-15 13190
-
基于软件无线电的无线信号实时监测系统设计总结2021-05-31 1246
-
软件无线电架构是怎样的?软件无线电有哪些应用?2021-05-21 2288
-
如何实现软件无线电的设计?2021-04-08 1819
-
软件无线电设计解决方案2019-07-29 1814
-
软件无线电结构设计的器件选择方法2019-07-26 2268
-
集成式软件无线电讲义2018-11-05 2457
-
点对点系统的常见无线电架构2018-10-29 1999
-
软件无线电、无线电的技术概述及应用2018-08-21 4455
-
基于软件无线电的基站设计2017-12-13 2755
-
本人想做无线电中央控制系统,求指点啊2013-08-01 3701
-
软件无线电系统的研究2011-03-01 590
-
软件无线电,软件无线电是什么意思2010-04-09 2260
-
基于软件无线电的无线信号实时监测系统设计2009-08-13 667
全部0条评论

快来发表一下你的评论吧 !
