

FMCW地基雷达设备在桥梁监测方面的应用
描述
摘 要:针对高铁桥梁传统振动监测方法过程复杂、成本高、精度低等问题,对盐通高铁桥梁的挠度监测应用了基于FMCW 体制的地基毫米波雷达,该体制雷达操作方便、体积重量小、精度高、成本低。阐述了由雷达回波相位反演桥梁形变信息的基本原理,简要介绍了其系统组成以及雷达参数,展示并分析了在盐通高铁联调联试期间不同车速运行时 24 m 简支梁跨中竖向动挠度监测结果。数据结果表明:在一定的速度范围内,随着列车车速逐级提升,桥梁跨中位置的动挠度呈现出总体增加的趋势,在某些速度上存在挠度减小的情况,当车速达到 340 km/h时,竖向动挠度达到峰值,随着车速再增加,桥梁产生的竖向挠度会有所下降。实验结果证明,所采用的 FMCW 毫米波雷达是一个高精度的桥梁振动监测雷达,能够准确监测桥梁的复杂振动,其便携、高精度的优势为我国高铁桥梁健康监测提供了新的方法。
引 言
我国高速铁路建设的重要特点是桥梁在高速铁路线路中总占比高,桥梁的性能监测对列车运营的安全性和舒适性至关重要[1]。而桥梁安全监测的内容广泛,挠度监测作为高速铁路桥梁安全监测的重要内容,直接反映了桥梁的整体刚度。准确测量不同车速经过时桥梁的动态挠度值,可以作为桥梁检定,评价桥梁运营状态的关键指标。目前传统的高速铁路桥梁的动态挠度监测方法大多是依靠铺设倾角仪、位移计以及架设全站仪、GPS 等仪器实现。这些接触式测量方法虽然技术成熟,但对于高架的高铁桥梁存在着安装困难、不易固定,并且操作复杂、成本高、工作效率低等问题[2];而非接触式现代地基雷达系统测量的方法能够避免这些问题,具有较高的研究意义。
目前,在桥梁监测方面国外已经发展了较成熟的地基雷达测量系统,如 IBIS⁃S、FastGBSAR。研究人员基于国外此类系统验证了地基雷达在桥梁挠度监测的精度[3]。如 文 献 [4]利 用 FastGBSAR 监 测 了 动 车 组 时 速300 km/h以上,载客运行状态下单双线通过京沪高铁32 m桥梁时梁体跨中位置竖向挠度,其验证了 FastGBSAR 统计测量的 32 m 桥梁跨中动挠度结果与传统方法检定的结果相吻合;文献[5]利用 IBIS⁃S 型地基雷达对某长江铁路大桥进行了短时间序列的动态挠度监测,分析了影响挠度数据质量的因素,并得出其测量的真实环境下地基雷达桥梁精度[4]为 0.27 mm。上述研究一方面采用的是国外设备,另一方面其监测都是针对某一个速度级,没有在不同速度级下对桥梁挠度进行监测。本文利用中国科学院国家空间科学中心研制的基于调频连续波(Frequency Modulation Continuous Wave,FMCW)体制的地基雷达系统,在盐通高速铁路运行检测期间,对不同车速下的桥梁动挠度进行了监测,统计了列车在不同速度级下 24 m 简支梁跨中位置的竖向动挠度,解决了在不同速度级下的桥梁动态挠度监测的工程问题,也为国内研制的地基雷达系统在桥梁监测等方面的应用推广奠定了基础。
1 基本原理
1.1 桥梁振动监测原理
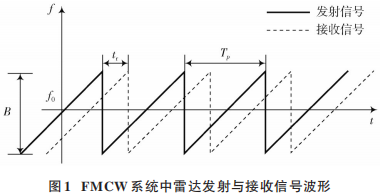
FMCW 系统发射信号为线性调频连续波信号,雷达的发射信号波形与目标返回的回波信号波形如图 1 所示。发射与接收信号之间存在一个时间延迟 tr = 2R c,R为雷达与目标之间的距离,c为电磁波的传播速度。
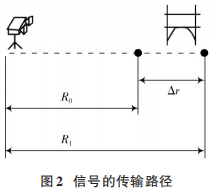
信号的传输路径如图 2所示,B 为扫频带宽,雷达发射电磁波并接收目标的回波信号,当目标由距雷达 R0的位置移动到距雷达 R1 的位置,则根据目标在不同时刻的雷达回波之间的相位信息可以求得目标的位置变化 Δr。t时刻,雷达发射信号为:

式中:A0 为雷达发射信号的幅度;f0 为中心频率;Tp 为扫频周期;k为发射线性调频信号的调频斜率。
在某时刻,距离雷达 Rt 处的点目标回波信号表达式为:
式中:rect()为矩形函数;A 为雷达接收信号的幅度。此时,回波信号的相位为:

式(3)最后一项为非线性残余相位,其引起的是不同距离上的回波信号在时间上的超前与滞后,可以通过“去斜”处理消除。当 Rt不同时,目标的距离差与两次回波的相位差之间的关系为:

式中:ΔR 为桥梁在雷达视线上的位置变化;Δφ 为不同回波信号产生的相位变化;λ 为雷达发射信号在其中心频率 f0 处对应的波长。由式(4)可以看出,雷达监测目标形变的能力与电磁波的波长与相位差的测量精度有关。根据雷达在桥梁下的具体摆放位置以及观测角度,通过测得的雷达视线上的距离差 ΔR可得到列车经过桥梁时桥梁产生的竖向动挠度,由实测动挠度可以计算得出所测桥梁的挠跨比、动力系数[6⁃7]等参数,通过与仿真的理论数值相对比,可以给高速铁路竖向荷载设计反馈重要的参数信息。
1.2 FMCW 雷达系统
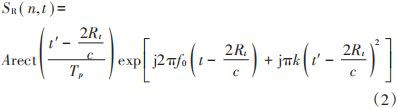
监测桥梁挠度变化所使用的 FMCW 雷达系统,其主要由天线、射频模块、数据采样及处理模块和频率综合器构成[8],雷达系统框图如图 3 所示,该雷达系统体积小,具有小型、便于携带的优势。系统采用了 Ka 波段,表 1列出了雷达的具体参数。
此系统采用的雷达信号是 Ka 波段下的线性调频连续信号,其发射信号与接收信号同时进行。为增加收发链路间的隔离度,系统发射、接收信号分别采用独立的天线。天线的形式采用波导缝隙阵,其波束较窄、效率高,增益为 30 dB,两个天线间的隔离度能够达到 60 dB以上。射频模块包括发射链路与接收链路两部分,数据采样处理模块提供了数据的采集存储功能,频率综合模块为系统生成稳定可靠的频率源。
该系统还具有全天时、全天候、连续监测等优点,并且具有高精度形变的检测能力,其精度可以达到毫米级。
2 桥梁挠度监测实验
2.1 实验条件
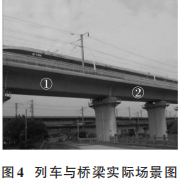
根 据 盐 通 高 铁 联 调 联 试 及 动 态 监 测 方 案 ,在CRH380AJ⁃0203 综合检测列车上下行线的逐级提速过程中,对不同车速条件下的桥梁进行竖向动挠度监测。CRH380AJ是极限时速可达 400多千米的高速综合检测列车,以 CRH380AJ 型电力动车组为基础,为 8 节编组。车身总长度大约 203 m,子车厢长度约为 25 m。检测列车从盐城到南通进行上下行线往返实验。盐通高铁线架设的桥梁多以 24 m,32 m 简支梁为主,其轨道形式为无砟轨道,实验地点选择在海安站⁃如皋南站线测点桥梁(桥墩编号 1261~1262 之间),图 4 为列车与桥梁实际场景图,图中 1 号位置桥梁为 32 m 简支梁,2 号位置为24 m 简支梁。本文从跨度应用广泛的 24 m 简支梁入手,统计车速从 180 km/h 逐级提升到 360 km/h 过程中不同速度级下的桥梁竖向动挠度的变化情况。
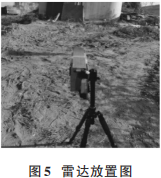
除上述的 FMCW 收发一体雷达外,完整的桥梁监测系统还包括:电源、三角支架、数据处理工作站等。图 5 为具体观测时雷达的实际放置状态,在进行桥梁挠度监测时,将雷达安装于三脚架上,并将三脚架固定在某一简支梁梁体跨中位置正下方地面上,雷达天线垂直向上观测梁体跨中位置。当列车高速通过桥梁时,保证雷达能精确测量出在轮轨冲击下桥梁的竖向形变信息。
2.2 实验结果与分析
实验采集了各个速度级桥梁跨中挠度的时域波形变化数据并进行了实时处理。图 6 为 24 m 简支梁不同运行车速下梁体跨中竖向动挠度时程曲线。图中显示了列车在 12 s内经过桥梁前后时桥梁的挠度变化。
可以清晰地看出列车在不同的车速下跨中位置梁体竖向挠度随时间的变化,车速分别为180 km/h,220 km/h,260 km/ h,300 km/ h,310 km/ h,330 km/ h,340 km/ h,350 km/h,360 km/h。当桥梁上没有列车通过的情况下,桥梁是静态的。当列车高速行驶通过时,桥梁状态发生变化,可以看出,高速行驶的列车在 5~9 s时间段内撞击铁路产生强烈的振动。伴随车辆离开,桥梁仍有短暂的余振,之后桥梁挠度再次恢复到静态状态。从以上9 个不同车速的图形比较来看,列车通过时产生振动的周期与实际列车车厢编组相符合,这说明在规则排列的列车轴重荷载作用下,桥梁出现有规律的振动,可以看出它们反映了相同的车桥振动响应特性。
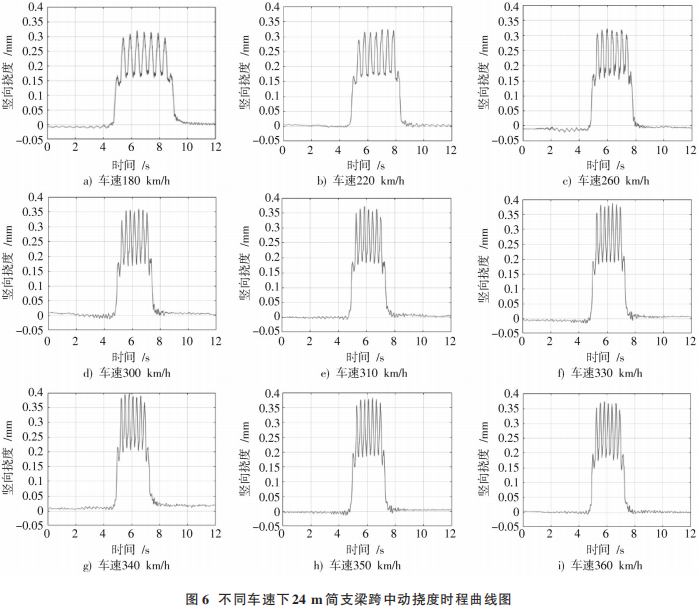
表 2 列出了不同车速下竖向动挠度峰值,其随速度变化分布见图 7。
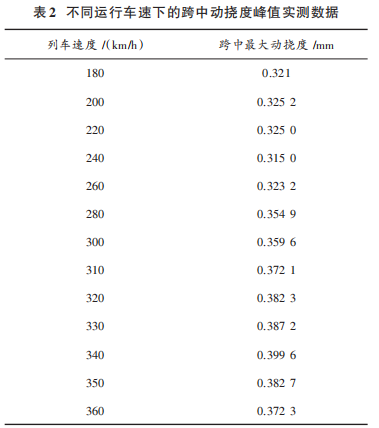
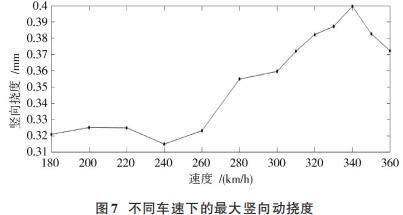
从图 7 中可以看出:车速在 180~220 km/h 范围内,梁体跨中位置的竖向挠度变化不是十分明显,呈现出缓慢上升的趋势;当列车速度达到 240 km/h,挠度有所下降,随着列车继续提速,在车速为 240~340 km/h 时,可以明显看出梁体跨中位置的竖向动挠度呈现出增加的趋势,说明在此速度区间内,桥梁的动挠度峰值受车速影响较大;当车速达到 340 km/h 时,达到最大动挠度,随着车速继续增加,梁体跨中位置的竖向动挠度呈现下降的趋势。在 180~360 km/h 的车速范围内,测得的最大动挠度为 0.40 mm,其对应的挠跨比结果远小于我国《高速铁路桥梁运营性能检定规定》中桥梁挠跨比的规范限值[7]。本文的实测数据与文献[9]在高速列车⁃桥梁系统竖向共振影响因素分析的研究中对 CRH3 高速列车通过24 m桥梁时的跨中振动位移仿真结果基本一致,其在车速300 km/h时跨中振动位移的仿真结果为0.42 mm。在本文实测数据中,当列车以 300 km/h 的速度通过时,桥梁跨中竖向挠度为 0.36 mm,实测值较理论值稍小。
从车辆动力学的角度分析,列车的车辆振动和桥梁结构的振动相互作用,形成一个复杂的多自由度振动系统[10]。在此系统中,机车的运动速度、机车运动时产生的周期性冲击、线路不平顺是影响车辆通过桥梁时产生竖向振动的主要因素[11]。正由于车辆在运行过程中会产生复杂的振动,真实地模拟出列车通过桥梁时桥梁产生的挠度是相当复杂和困难的。文献[12]在桥梁列车的耦合振动试验中得出简支梁最大动挠度均远小于竖向挠跨比限值,桥梁竖向动挠度随车速的增加而增大。而从本次实测数据中可以看出,桥梁跨中位置的竖向动挠度不是随速度的增大而单调的增加,而是在挠度起伏的过程中逐渐增大,从简支梁在移动载荷作用下的振动响应理论分析来看,速度对于桥梁挠度的影响是一个相对复杂的过程。在一定的速度下,移动恒定载荷通过桥梁时,列车与桥梁存在着共振与消振问题。在简支梁桥竖向振动响应中有研究也指出车辆通过简支梁桥时,会在某些速度下发生共振,一般速度低时共振响应小,速度高时共振响应大。文献[13]在简支梁共振与消振机理研究中也指出共振现象放大桥梁响应,消振发生时桥梁的振动响应较小。
参照以上结果的对比分析可以得出,车桥系统分析模型和计算机仿真方法可以较好地模拟列车高速通过时桥梁的挠度变化。本文通过实测数据分析既验证了理论模型的有效性,也得出盐通铁路 24 m 跨度简支梁在高速列车运行下的动挠度指标与整体刚度良好,可以保证轨道上的行车稳定性和乘坐舒适性。
3 结 语
本文利用国内研制的 FMCW 体制地基雷达对盐通铁路上 24 m 简支梁进行了不同车速运行时的竖向动挠度监测。实验结果表明,基于该体制雷达高精度、高频率的优势,其能够准确测量不同车速冲击下桥梁跨中竖向动挠度变化,相对于传统的高铁简支梁挠度监测,提供了一种高效灵活的测量方式,结果显示测量的精度可以达到毫米级,本次实验也推广了国内自主研制的FMCW 地基雷达设备在桥梁监测方面的应用。
-
单脉冲FMCW雷达DSP功能2011-02-27 1657
-
桥梁健康监测方面的程序2013-03-30 1945
-
FMCW测距雷达2014-03-20 5146
-
一个示例说明FMCW雷达信号设计的基本原则2015-12-12 9534
-
24GHz微波雷达FMCW测距系统设计概述2015-12-29 19397
-
24G微波雷达在不同行业的应用案例介绍以及CW/FMCW模式的参考电路资料2018-07-11 5270
-
桥梁结构健康监测系统ABC-监测哪些参数?2020-09-20 1796
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30522
-
使用毫米波雷达进行生命体征监测2021-09-02 6469
-
多载频FMCW在MIMO雷达中的应用研究2011-06-20 1125
-
FMCW微波物位计的原理2019-11-19 2119
-
FMCW激光雷达在自动驾驶上的前景2022-04-18 4246
-
振弦采集仪在地基沉降监测中的应用研究2024-01-04 961
-
相位噪声对FMCW雷达系统的影响2024-01-31 3588
-
桥梁阵列雷达波测流监测技术与应用2026-03-03 319
全部0条评论

快来发表一下你的评论吧 !
