

 科瑞特(CRT)功能实用|编辑简单|直坐标机器人编程案例
科瑞特(CRT)功能实用|编辑简单|直坐标机器人编程案例
电子说
1.4w人已加入
描述
CRT-DMC630MF三轴桁架机械手示教系统是基于三轴运动控制器DMC630M的硬件平台,在公司三轴仿形示教系统成熟的技术和广泛的市场应用的基础上,根据市场需求,采纳了广大客户的宝贵意见,并参考国内外高端同类产品的一些功能及优点,经深圳市科瑞特自动化全体同仁的共同努力,推出的一款功能齐全、使用方便灵活的高端运动控制系统。
例程要求:如图1所示:图中立方体为障碍物,加工点不能与之触碰,P1点为取料点,P2点位放料点,首先移动到P1点,取料(OT1为1),延时1000ms,检测是否取到料(IN16),若没有取到料(IN16有效)发出报警信号(OT3),直到解除报警(IN17有效),取到料后抬高到安全位(P3),移动到P4,再移动到放料点P2,放料(OT1为0),移动到P4,移动到P3,检测是否还要取料(IN18),如果IN18有效,移动到P1重复之前动作,如果IN18无效,回原点P5。
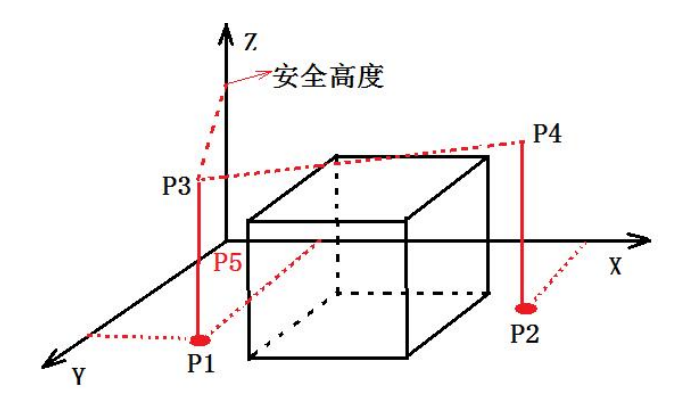
图1
操作步骤如下:
1.用户登录。
2.设置当前工件序号。
3.设计工艺流程:根据例程要求设计工艺流程,具体流程如图2所示。
4.编辑工艺程序:根据工艺流程编辑工艺程序 ,具体的图元指令以及指令对应的参数如 图3所示
5.轨迹采集:按照上一个例程的方法,分别采集点1~5的坐标信息。
6.运行验证:返回到“模式选择”界面,按“3”进入“运行模式”界面,按“F1”运行,然后按控制器上连接的运行按钮,观察运行结果。
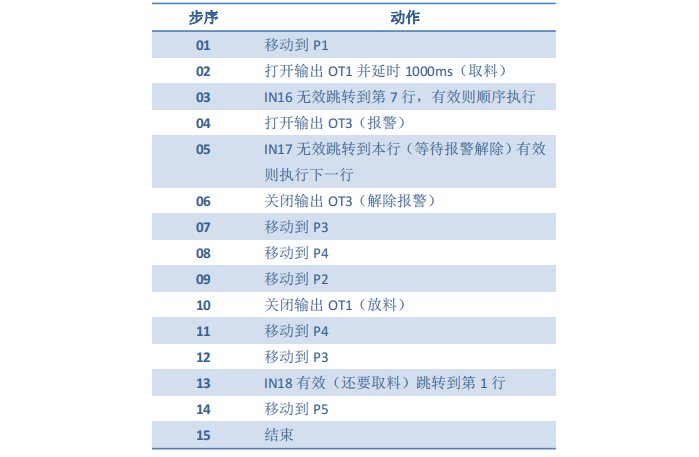
图2
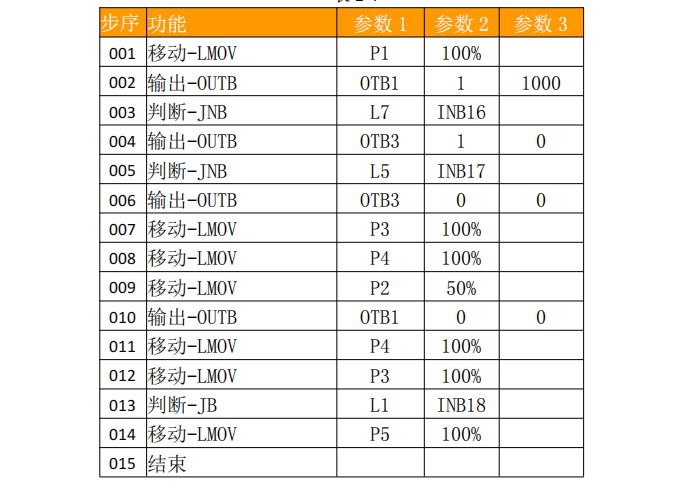
图3

直坐标机器人控制系统
审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
直角坐标机器人&关节机器人的区别详解2022-11-02 4109
-
直角坐标机器人&关节机器人的区别详解2022-10-27 3110
-
功能实用|编辑简单|CRT直坐标机器人示教编程案例2022-10-24 1470
-
科瑞特(CRT)功能实用|编辑简单|桁架机械手编程案例2022-10-20 2222
-
Motoman机器人离线编程2021-09-07 2347
-
介绍坐标系和机器人之间的纽带即连杆坐标系2021-09-01 1582
-
桁架机器人的概念与特点都有哪些?2020-11-30 2759
-
坐标机器人的特点_坐标机器人的应用2020-08-24 3196
-
Labview与Fanuc机器人通讯心得,访问机器人IO和坐标2020-06-10 5302
-
自己开发的机器人图形化编程软件2016-07-02 13846
-
工业机器人的基本结构2015-01-19 9613
-
机器人的坐标系的建立2013-06-10 3053
-
水下机器人便携式遥控单元设计2011-03-08 10154
全部0条评论

快来发表一下你的评论吧 !
