

浅谈机器人的激光雷达/MEMS IMU/里程计紧组合导航算法
机器人
描述
作者:张福斌、王凯、廖伟飞、孙成浩
随着科学技术的不断发展,机器人技术取得了长足的发展。各类机器人已经广泛应用于军事、救援搜救以及家政服务等方面。对于任何一个机器人而言,拥有精确的导航定位系统是重中之重。精确感知自身位置的能力有助于机器人的路径规划以及避障等功能。
全球定位系统(GPS)作为一种机器人常用定位方式,受制于天气、无线电、遮挡等环境因素,导致导航系统实时性与可靠性难以保证,环境的未知以及机器人运动的不确定性会对SLAM系统的鲁棒性与稳定性提出更高要求,为了解决这一问题,有必要进一步研究SLAM以及惯性导航技术。由于激光SLAM、IMU以及轮式里程计在导航应用方面各有优势,有着较为良好的互补性,研究基于激光雷达的多传感器融合SLAM技术有望提高导航系统鲁棒性与韧性。
据麦姆斯咨询报道,为提高机器人在未知复杂环境中导航系统的鲁棒性与稳定性,西北工业大学张福斌教授团队以及中国飞行试验研究院的研究人员共同提出一种激光雷达/MEMS IMU/里程计紧组合导航算法,利用多传感器联合优化提高了机器人的定位精度。无论在室内还是室外、开环还是闭环场景,该算法都可以提高导航系统在无GPS信号时的导航定位精度,具有很好的应用价值与使用前景。相关研究成果已发表于《仪器仪表学报》期刊。
在该项工作中,研究人员将激光导航算法与惯性导航算法相结合,针对轮式机器人在卫星导航信号不可用环境中的应用,设计提出一种非线性优化的激光雷达/MEMS IMU/里程计紧组合导航算法,通过MEMS IMU/里程计数据的预积分,对激光雷达的运动产生的畸变点云进行矫正,以提高两帧点云之间的特征匹配效率。进而,通过多传感器之间耦合来提高系统整体的导航定位水平。
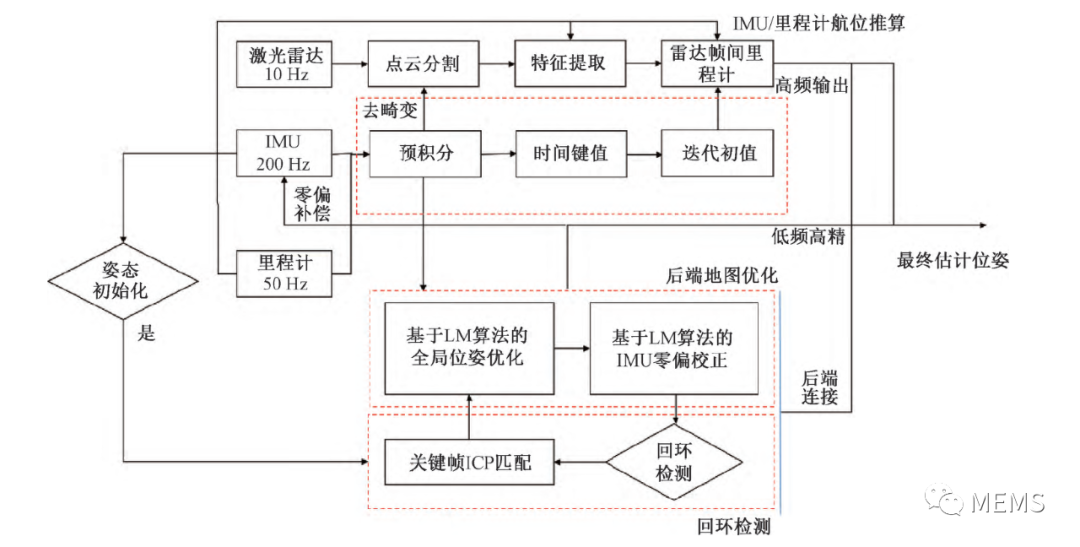
激光雷达/MEMS IMU/里程计紧组合导航算法的基本框架
针对GPS信号不足的一些应用场景,研究人员基于ROS的轮式机器人,设计了室内实验、室外开环实验以及室外闭环实验。在不同场景下运行ALOAM算法、LEGO-LOAM框架算法以及该研究提出的激光雷达/MEMS IMU/里程计紧组合算法,运行期间记录激光雷达点云数据、里程计数据、MEMS IMU数据以及差分GPS数据。并将上述数据分别用于各种SLAM算法,验证各自定位精度,在室内场景使用手动实验轨迹作为真实轨迹;在室外场景使用差分GPS作为真值输出小车行驶的标准轨迹来验证激光雷达/MEMS IMU/里程计紧组合算法的有效性。

小车系统整体结构
室内实验轨迹示意图
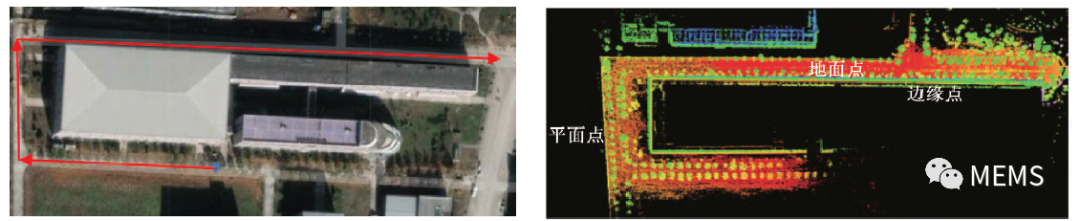
左:室外开环实验轨迹示意图;右:室外开环实验激光三维点云地图
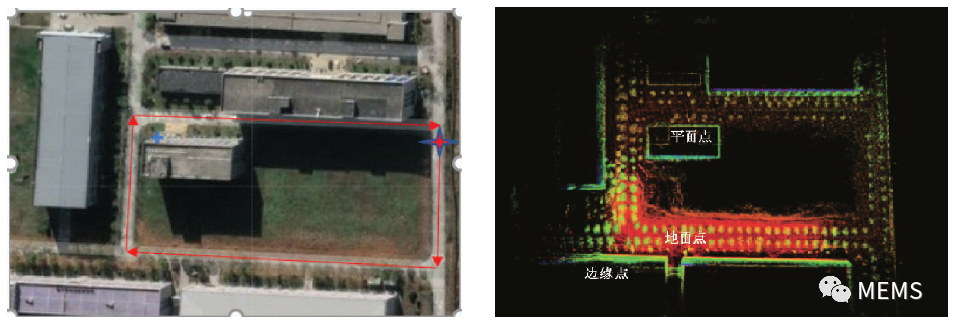
左:室外闭环实验轨迹示意图;右:室外闭环实验激光三维点云地图
实验结果表明,无论是室内还是室外、开环还是闭环,该算法都可以提高导航系统在无GPS信号时的导航定位精度。该算法室外开环定位误差均值比传统算法ALOAM、LEGO-LOAM分别减小51.01%和24.75%,并且其在拐弯等运动剧烈时也能够保持较高精度,具有很好的应用价值与使用前景。
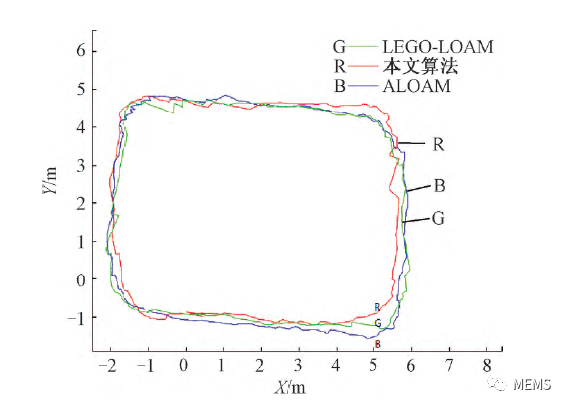
室内闭环轨迹对比
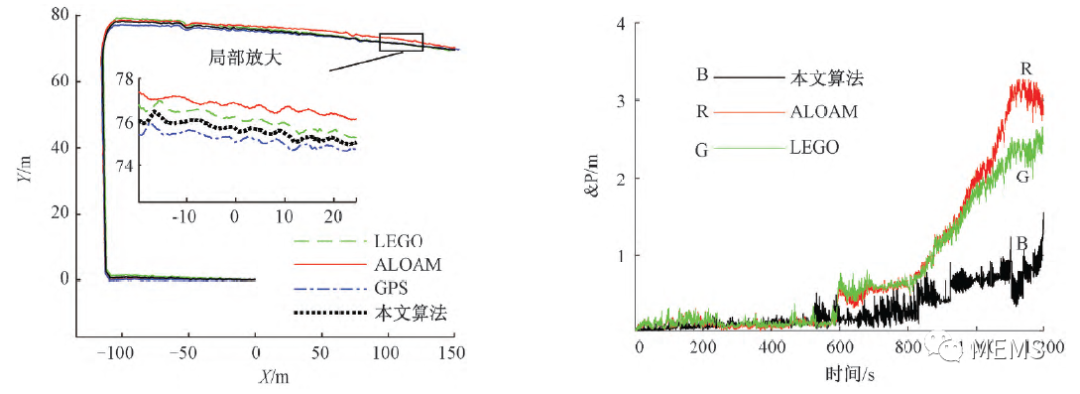
左:室外开环轨迹对比;右:室外开环误差对比
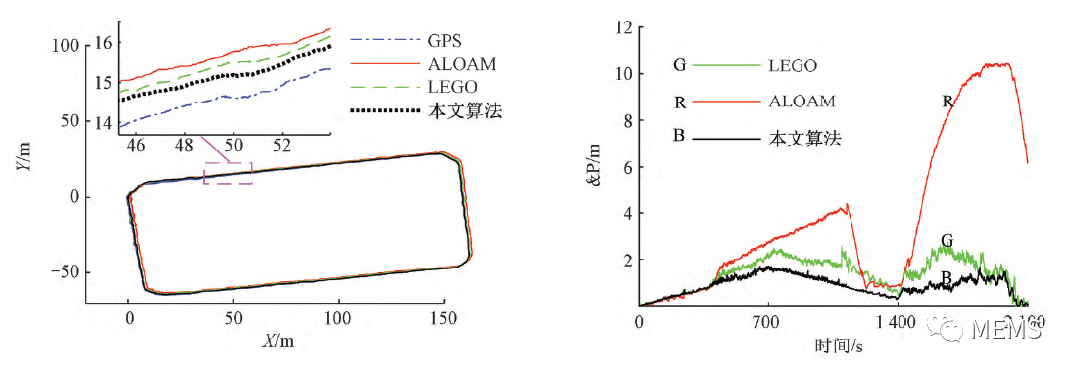
左:室外闭环轨迹对比;右:室外闭环误差对比
研究人员称,由于实验条件和时间限制,该项研究后续有待进一步改进与完善。可以在一些几何特征稀疏场景,如荒野、大型广场等进一步验证。此外,对于长时间导航过程中,该紧组合算法在垂直方向上仍然存在定位漂移,可以考虑在非线性优化时加入高度计测量真值,减小算法在垂直方向上的累积误差。
编辑:黄飞
-
【CIE全国RISC-V创新应用大赛】+基于MUSE Pi Pro的3d激光里程计实现2025-10-24 1691
-
轮式移动机器人里程计分析2023-04-19 3540
-
基于一种非线性优化的激光雷达/MEMS IMU/里程计紧组合导航算法2022-11-03 1107
-
一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架2022-09-14 2720
-
设计一个能自由行走并且可以与人语音对话机器人的设计资料分享2021-12-17 1337
-
请问如何理解SLAM用到的传感器轮式里程计IMU、雷达、相机的工作原理?2021-10-09 2988
-
暗物智能广州公司招聘机器人岗位贴(导航&&应用开发)2020-06-08 10576
-
机器人和激光雷达都不可或缺2019-02-15 6239
-
除了机器人行业,激光雷达还能应用于哪些领域?2018-12-10 4925
-
服务机器人是如何实现自主定位导航的?2018-10-10 3318
-
让机器人在陌生环境里穿梭自如的激光雷达2018-09-10 3958
-
关于机器人定位与建图,这些小技巧你懂吗2018-03-28 4527
-
深度解析|机器人自主移动的秘密(二)2017-06-30 3401
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8365
全部0条评论

快来发表一下你的评论吧 !
