

用HLS实现PID控制器
描述
PID控制器(比例-积分-微分控制器),由比例单元(Proportional)、积分单元(Integral)和微分单元(Derivative)构成,可以通过调整这三个单元的增益来调整其特性,如下图所示。PID控制器主要适用于基本上线性且动态特性不随时间变化的系统。
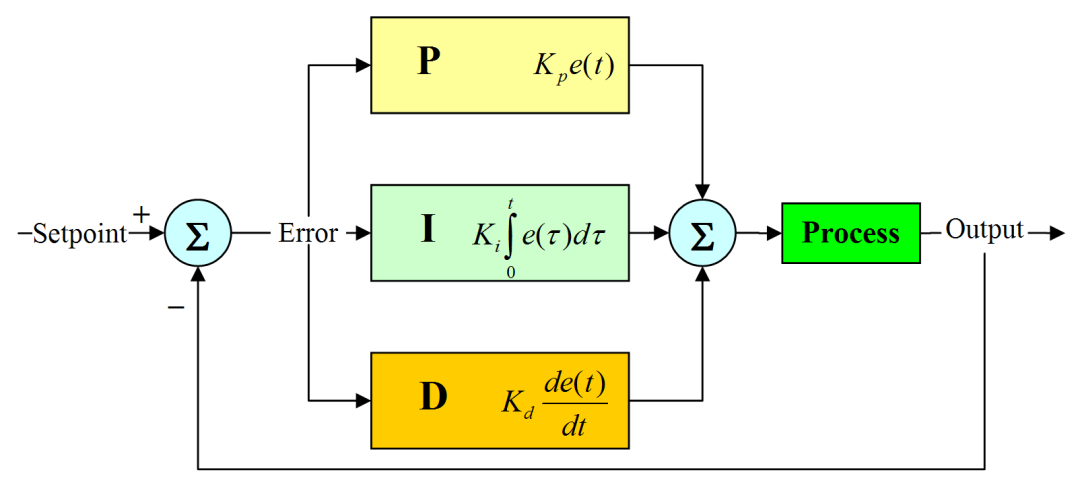
不难看出,PID控制器是一个带有反馈支路的闭环系统,这个控制器把收集到的数据和一个参考值进行比较,然后根据此误差值计算新的输入值。这个新的输入值的目的是让系统的输出数据达到或者保持在参考值。PID控制器可以根据历史数据和误差的出现率来调整输入值,使系统更加准确而稳定。
从编程角度而言,我们需要知道参考值、初始输出值、比例单元增益、积分单元增益和微分单元增益。但这还不够,毕竟上图显示的是一个模拟系统而非离散化的数字系统。接下来我们看看如何对其进行离散化处理。
比例控制单元
比例控制单元是PID控制器中最简单的部分,通过一个乘法操作即可完成。其物理意义在于“稳”,即稳定性,放大控制作用,表征的是粗调跟进以快速地响应被控对象和输入的线性关系。
积分控制单元
如果仅用比例控制单元,那么系统就会出现稳态误差,因此,我们引入了积分控制单元。积分控制单元的传递函数可表示为(在z域)
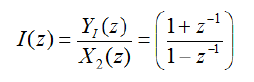
由此可得输出和输入的时域表达式为

不难看出,积分的离散化实质上就是累加。从物理角度而言,积分控制单元对于“准”,其目的是消除稳态误差。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
PID控制器的类型和选择指南2024-11-06 3796
-
PID控制器与PWM控制器的区别2024-06-05 7869
-
PID控制器的含义2023-03-09 5367
-
PID控制器简介2021-09-07 2509
-
用Step7实现PID控制2021-04-22 1136
-
PID-PID控制器参数整定与实现2020-05-12 1719
-
pid控制器工作原理2019-07-18 12181
-
pid控制器的输入输出_PID控制器的控制实现2018-06-01 32062
-
快速浮_定点PID控制器FPGA的研究与实现2016-05-11 736
-
直流调速系统的模糊PID控制器设计实现2016-04-06 1084
-
基于BP神经网络的PID控制器的研究与实现2012-04-01 1292
-
基于FPGA实现PID控制器的研究2009-09-15 844
-
基于MBP算法的PID控制器设计2009-08-07 681
-
pid控制器原理2008-09-10 14428
全部0条评论

快来发表一下你的评论吧 !
