

MATLAB在自动驾驶领域的应用开发和最佳实践
描述
高级驾驶辅助系统(ADAS)和全自动驾驶(AD)正在推动汽车行业的创新,改变交通运输的方方面面,从日常通勤到长途卡车运输。这个新兴的大趋势重新定义了传感器和计算平台的需求,导致了深度学习、传感器融合、激光雷达和 V2X 等新技术的发展。此外,随着复杂度和场景数量急剧增加,ADAS/AD 应用开发在测试验证方面存在着诸多挑,
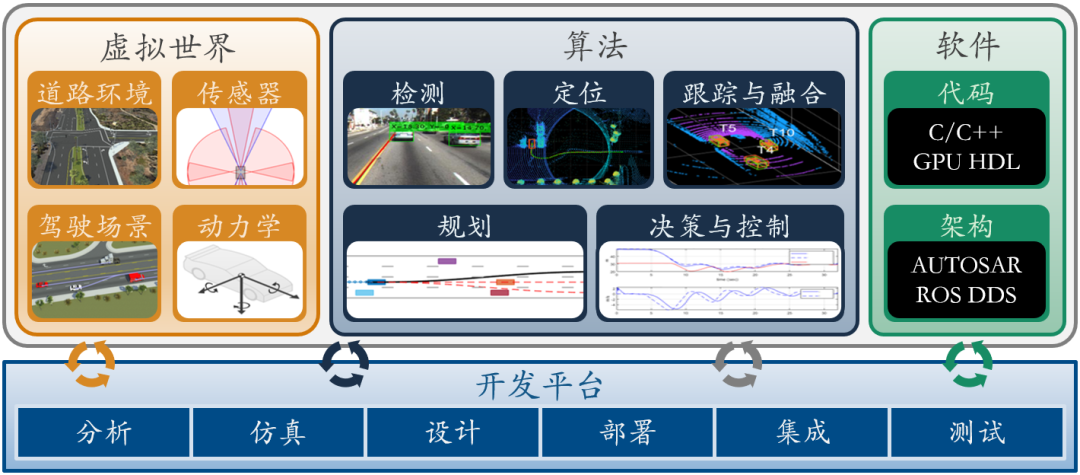
MATLAB、Simulink 和 RoadRunner 开发平台为计算机视觉、雷达、激光雷达处理、传感器融合、路径规划和控制、虚拟场景创建和软件实现等提供了许多参考示例、预构建算法、工作流以及完备工具链,可以加速自动驾驶系统功能的开发。
本次研讨会将由 MathWorks 工程师介绍 R2022a 和 R2022b 中自动驾驶的新特性和示例。同时,一汽解放的客户嘉宾将分享使用 MATLAB 和 RoadRunner 实现激光雷达SLAM和高精地图制作的应用实践。 会议时间:11月29日 13:30—16:30
会议亮点
1) 使用 MATLAB 开发视觉和激光雷达 SLAM 系统
本次演讲将通过实例来介绍如何使用 MATLAB 来进行基于特征点的视觉SLAM系统的开发,以及基于点云配准的激光雷达 SLAM 算法的开发。同时将展示它们在自动泊车系统当中的应用。
2) Lidar SLAM 与限定区域高精地图制作 高精地图是低速限定场景自动驾驶解决方案中不可少的一环,如何便捷的制作限定区域的高精地图就显得尤为重要。本次演讲将分享如何使用MATLAB 自动驾驶相关的工具箱处理激光雷达点云信息,对点云进行配准,回环检测以及后端优化生成点云地图,并利用 RoadRunner 和生成的点云地图创建高精地图。另外,针对点云全自动生成高精地图(RoadRunner HD Map)的工作流进行了尝试探索。
3) MATLAB 智能驾驶参考示例更新——3D 仿真与智能网联 在 MATLAB R2022a 和 R2022b 中,更新了很多仿真智能驾驶功能的参考示例,我们将就以下两方面的示例进行分享:
如何将 RoadRunner Scenario 的 3D 场景接入到 Simulink,使用Simulink传感器模型,测试 ADAS 法规场景与高速自动驾驶
如何使用 Simulink 仿真 V2X,以及基于 V2V 通信的卡车编队驾驶
4) 基于模型设计加速自动驾驶的 SOA 软件实现 自动驾驶算法的复杂性要求采用更高性能的处理器和更高抽象度的语言来承载和实现,并引入面向服务的架构来进行解耦和分层。本演讲将通过以下内容的介绍来展示面向服务的软件架构在自动驾驶方向的具体实现。
自动驾驶算法的组成和特点
基于模型设计支持 SOA 的新特性
SOA 互操作的概念及案例演示
审核编辑 :李倩
-
FPGA在自动驾驶领域有哪些应用?2024-07-29 8399
-
LabVIEW开发自动驾驶的双目测距系统2023-12-19 4519
-
自动驾驶技术的实现2021-09-03 3259
-
联网安全接受度成自动驾驶的关键2020-08-26 3362
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2925
-
如何让自动驾驶更加安全?2019-05-13 3776
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3314
-
LG电子布局机器人和自动驾驶领域2018-12-03 3292
-
硅谷组建团队、L3产品落地,想法多多的腾讯自动驾驶2018-11-13 3400
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7584
-
自动驾驶的到来2017-06-08 7477
-
2017a自动驾驶2017-06-07 11330
-
自动驾驶真的会来吗?2016-07-21 14599
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 14373
全部0条评论

快来发表一下你的评论吧 !
