

基于微惯性传感器的高灵敏度随动控制技术
描述
随着现代军事装备的智能化升级,武器装备对感知认知与智能控制提出了更高需求。随动装备作为一种典型的智能化装备,通过多种技术手段把受控对象与操控人员的肢体动作直接结合,实现自然的人机交互方式,提升作战效率。
在随动控制系统中,随动精度与随动时延均为关键性指标,二者共同决定了随动控制装备的人机交互体验,需要机电系统既能满足实时性需求,又能满足精度指标。因此兼顾实时性与准确性的系统方案成为随动系统的设计难点。
据麦姆斯咨询报道,为了解决随动精度与随动时延问题,中国兵器工业计算机应用技术研究所、北京卫星导航中心的研究人员提出一种基于微惯性器件与模糊控制云台的低延迟体感随动控制技术。该技术使用微惯性单元(MEMS IMU)获取高灵敏度体感姿态数据,并使用该姿态数据对双轴云台进行实时高精度随动控制。通过低成本高采样频率的姿态算法与高实时性与响应精度的小型双轴云台模糊控制算法改进,能够在88.17 ms内实现均方根误差(RMSE)1.478°的随动控制。该随动控制系统可以满足无人机控制与观察、车载雷达与武器站控制等领域,可大幅降低设备操控复杂度,提升控制特性。相关研究成果已发表于《兵工学报》期刊。
该项工作中,研究人员选取微惯性传感器与小型云台构成的随动系统作为研究对象,分别对实时姿态采集算法与云台控制方案进行设计,提升随动系统实时性与准确性。在姿态解算方面,选用低成本小型六轴微机电惯性测量单元作为传感单元,通过姿态解算与互补滤波获取实时准确的姿态信息。在云台控制方面,使用模糊控制PID高频位置闭环算法改善现有双轴云台的机电控制系统,兼顾非线性输入下机电响应的实时性与准确性。
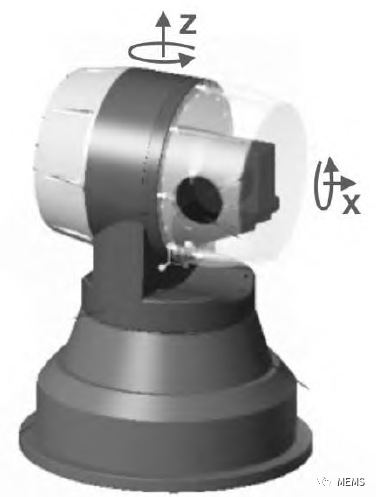
小型云台结构示意图
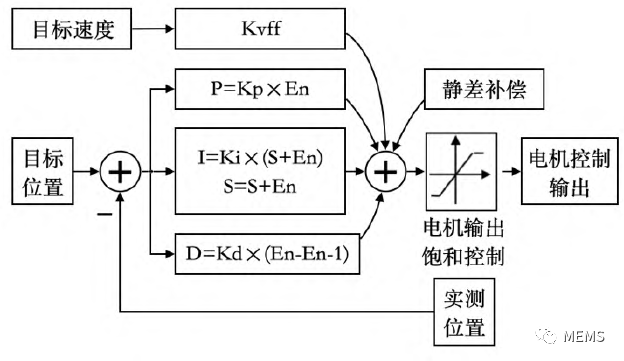
数字PID控制器设计
为了对基于微惯性器件与模糊控制云台的随动系统控制实时性与准确性进行验证,研究人员设计了三项实验。首先是“姿态测量精度实验”,使用高精度双轴转台对惯性器件的短时测量精度进行验证,验证随动系统的姿态测量精度。其次是“头部运动测量实验”,利用第一项实验中的姿态测量系统对人体头部运动进行测量,获取人体头部运动的典型参数。最后结合第二项实验中的人体头部运动典型参数,设计“位置随动控制实验”,对微惯性器件与模糊控制云台随动系统性能进行综合表征,验证随动系统的实时性与准确性。
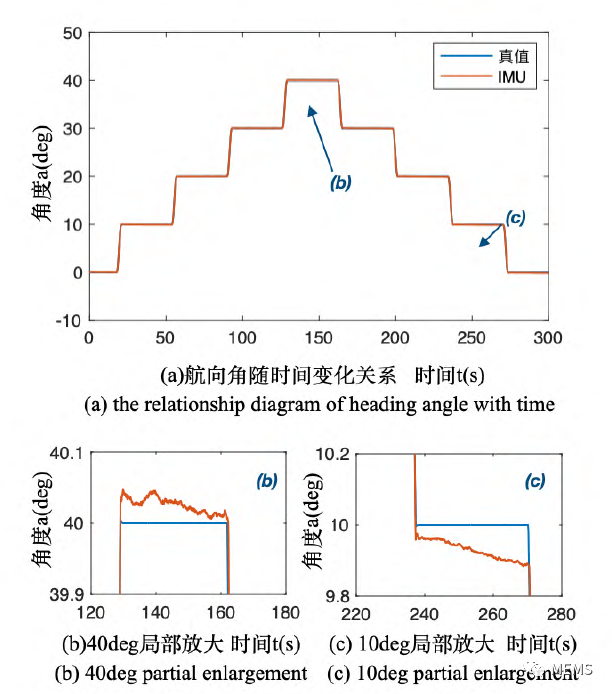
姿态测量精度实验

头部运动测量实验设备
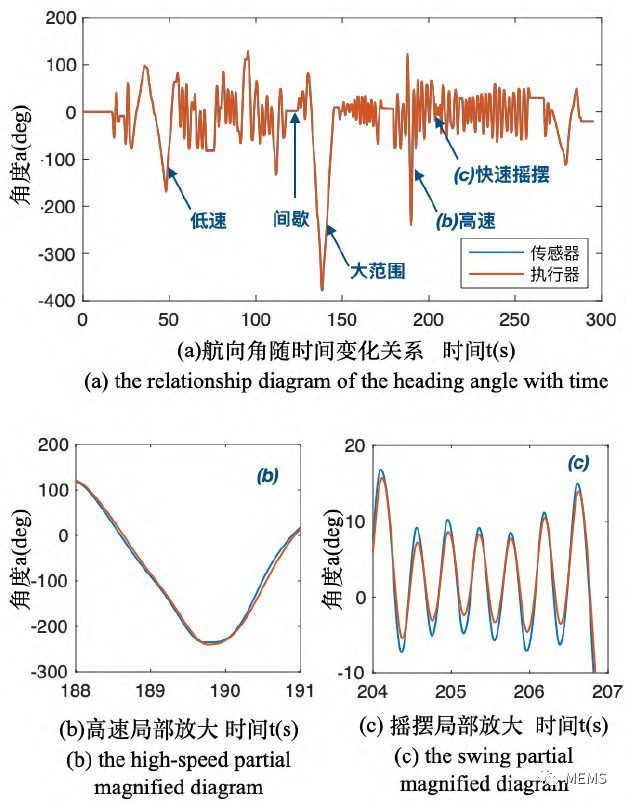
位置随动响应实验
结果表明,在实验过程300 s内,综合低速、间歇、大范围、高速、摇摆等运动形式,随动系统精度较高,能够在88.17 ms内实现均方根误差(RMSE)1.478°的随动运动精度,可以满足位置随动控制精度需求。该精度主要受限于机电控制环节,提升响应速度与精度一方面可以通过载荷、编码器、机械结构、线缆减重以降低转动惯量实现;另一方面,提升电机效率,能在单位转动惯量下实现更高功率输出,也能改善随动系统的机电特性。
该项工作通过传感器的实时采集算法改进与云台的高频位置闭环模糊PID控制设计,用低成本实现了低延迟高精度随动控制功能。研究人员称,后续将继续开展相应优化工作,一方面围绕惯性系统滤波修正,引入观察量提升随动控制的长期稳定性;另一方面继续提升执行器机电性能,提升随动控制的响应速度与精度。
审核编辑:汤梓红
-
柔性传感器的灵敏度多少算高?传感器灵敏度大小与灵敏系数的关系2023-10-24 5211
-
应用于血液中凝血酶精准检测的高灵敏度传感器2022-04-08 10517
-
高灵敏度单极霍尔开关电路传感器HAL5802021-06-23 1324
-
ADPD2212:低噪声、高灵敏度光学传感器数据表2021-04-30 1066
-
ADPD2211:低噪声、高灵敏度光学传感器数据表2021-04-29 1353
-
CMOS工艺中的高灵敏度垂直霍尔传感器的资料详细说明2020-06-11 2183
-
请问高灵敏度用什么传感器好?2019-03-29 2628
-
高灵敏度微球激光传感器2018-12-03 3124
-
MDT高灵敏度卓越性能的Z轴TMR传感器2018-11-05 2791
-
求一个精度高,高灵敏度的温度传感器2015-10-29 4564
-
传感器的灵敏度2014-07-26 4445
-
FKS高灵敏度气压传感器2009-10-21 1399
-
高灵敏度微机械薄膜的设计、模拟与优化2009-07-18 718
-
高灵敏度光纤光栅压力传感器及其压力传感特性的研究2009-07-06 834
全部0条评论

快来发表一下你的评论吧 !
