

H桥电机驱动电路设计与解析
描述
一、简介
之前介绍过H桥电机驱动电路的基本原理,但是以集成的电机驱动芯片为示例。这些集成的芯片使用起来比较简单,但是只能适用于一些小电流电机,对于大电流的电机(比如:RS380和RS540电机),则不能使用这些集成的芯片(否则会导致芯片严重发热并烧毁)。
此时便需要自行用半桥/全桥驱动芯片和MOS管搭建合适的H桥电机驱动电路实现对大电流电机的驱动控制。
二、示例原理图和PCB展示
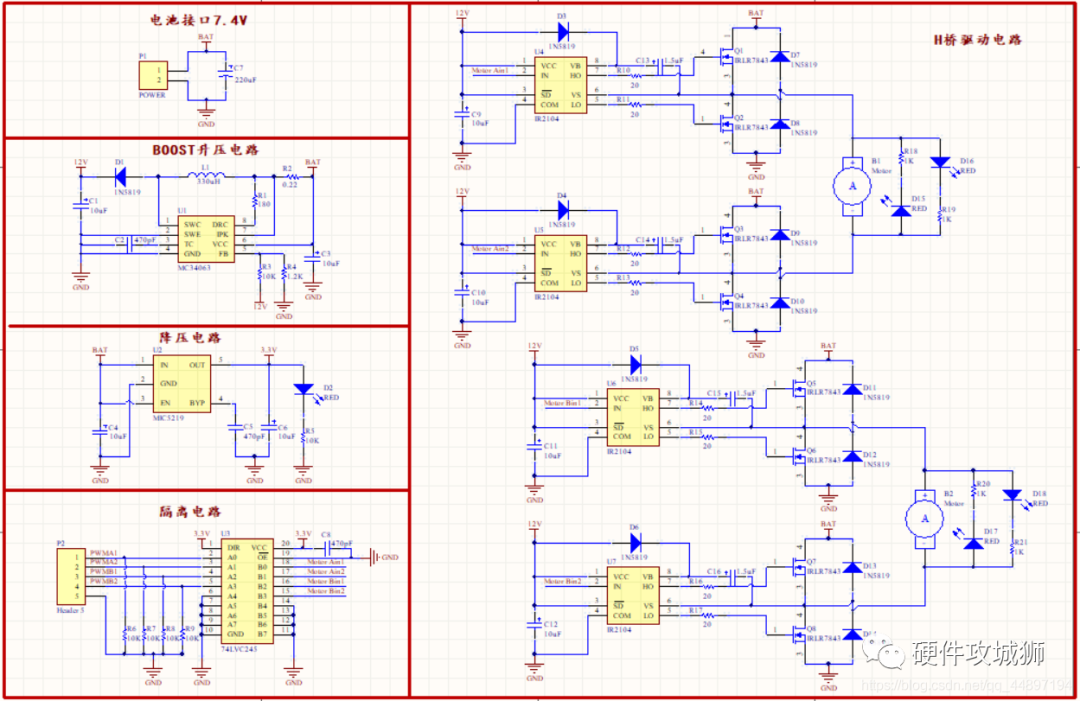
此原理图和PCB采用的是网上分享的电路设计(IR2104半桥驱动+LR7843MOS管),为了便于焊接,对其中的一些封装进行了修改,并重新布线。
该电机驱动板有两个H桥电路,可以同时控制双路电机。可通过相应的控制信号来控制电机的转速和正反转。
1.原理图
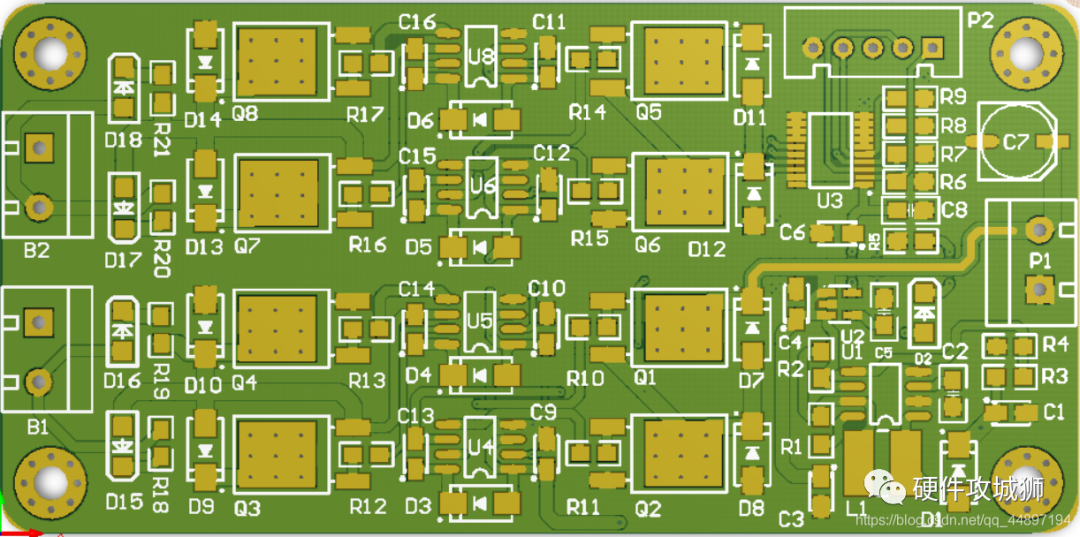
2.PCB 3D图
三、辅助电路部分讲解
本驱动模块默认采用7.4V的锂电池组接入右侧的P1端子进行供电。
1、BOOST升压电路
★BOOST升压电路采用的是MC34063这款芯片。此模块主要是将7.4V的输入电压升到12V后为后面的IR2104S半桥驱动芯片供电(需要12V的原因将在下面介绍)。此芯片的工作原理在此不多做介绍,可自行下载数据手册进行学习(后期会对此专门写一篇博客介绍)。
注意事项:
(1).此BOOST电路模块是此驱动板中较为容易出问题的部分,因此焊接时需要先对其进行焊接调试,确认没有问题后再进行后续的焊接。
(2).此电路需要尤其注意0.22Ω的精密电流检测电阻,如果电阻质量不合格很容易出现问题,导致电路不能正常工作。
2、降压稳压电路
★降压稳压电路采用的是MIC5219这款LDO芯片。此电路模块将7.4V的输入电压降压稳压到3.3V给后面的74LVC245芯片供电。类似芯片较多,使用也较为简单。
如需要详细了解其工作原理,可参看此篇文章:深入理解LDO
3、隔离电路部分
在设计电机驱动板时,很多都会有一个用于隔离的电路模块。主要用于将控制器与H桥驱动电路隔离开,防止损坏控制器。
此电机驱动板采用了74lvc245这款三态输出的收发器芯片作为隔离芯片。也可以使用74HC125(三态四线非反相缓冲器)或74HC244(三态八线非反相缓冲器)。具体使用说明可参考相应的数据手册。
四、搭建的H桥驱动电路详解
1、简介
在学习此部分之前,需要先掌握基础H桥驱动的工作原理,具体可参看此篇博客:电机驱动芯片(H桥、直流电机驱动方式)
自行搭建的H桥驱动电路一般都包括两个部分:半桥/全桥驱动芯片和MOS管。自行搭建的H桥驱动所能通过的电流几乎由MOS管的导通漏极电流所决定。因此,选择适当的MOS管,即可设计出驱动大电流电机的H桥驱动电路。
2、NMOS管IRLR7843
在选择MOS管搭建H桥时,主要需注意以下一些参数:
★1.漏极电流(Id):该电流即限制了所能接入电机的最大电流(一般要选择大于电机堵转时的电流,否则可能在电机堵转时烧毁MOS管),LR7843的最大漏极电流为160A左右,完全可以满足绝大部分电机的需要。
★2.栅源阈值电压/开启电压(Vth):该电压即MOS管打开所需的最小电压,也将决定后续半桥驱动芯片的选择和设计(即芯片栅极控制脚的输出电压)。LR7843的最大栅源阈值电压为2.3V。
★3.漏源导通电阻(Rds):该电阻是MOS管导通时,漏极和源极之间的损耗内阻,将会决定电机转动时,MOS管上的发热量,因此一般越小越好。LR7843的漏源导通电阻为3.3mΩ。
★4.最大漏源电压(Vds):该电压是MOS管漏源之间所能承受的最大电压,必须大于加在H桥上的电机驱动电压。LR7843的最大漏源电压为30V。满足7.4V的设计需要。
3、半桥驱动芯片IR2104S
在H桥驱动电路中,一共需要4个MOS管。而这四个MOS管的导通与截止则需要专门的芯片来进行控制,即要介绍的半桥/全桥驱动芯片。
★所谓半桥驱动芯片,便是一块驱动芯片只能用于控制H桥一侧的2个MOS管(1个高端MOS和1个低端MOS,在前述推荐的博客中有介绍)。因此采用半桥驱动芯片时,需要两块该芯片才能控制一个完整的H桥。
★相应的,全桥驱动芯片便是可以直接控制4个MOS管的导通与截止,一块该芯片便能完成一个完整H桥的控制。
这里使用的IR2104便是一款半桥驱动芯片,因此在原理图中可以看到每个H桥需要使用两块此芯片。
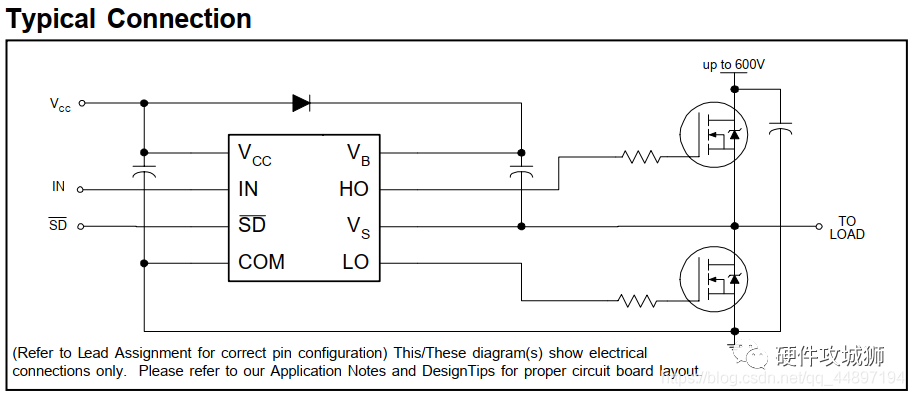
1、典型电路设计(来源于数据手册)
2、引脚功能(来源于数据手册)
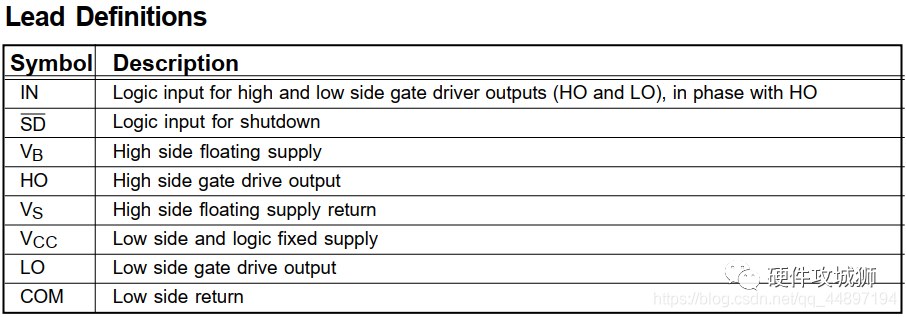
★VCC为芯片的电源输入,手册中给出的工作电压为10~20V。(这便是需要boost升压到12V的原因)
★IN和SD作为输入控制,可共同控制电机的转动状态(转向、转速和是否转动)。
★VB和VS主要用于形成自举电路。(后续将详细讲解)
★HO和LO接到MOS管栅极,分别用于控制高端和低端MOS的导通与截止。
★COM脚直接接地即可。
3、自举电路
此部分是理解该芯片的难点,需要进行重点讲解。从上面的典型电路图和最初的设计原理图中均可发现:该芯片在Vcc和VB脚之间接了一个二极管,在VB和VS之间接了一个电容。这便构成了一个自举电路。
作用:在高端和低端MOS管中提到过,由于负载(电机)相对于高端和低端的位置不同,而MOS的开启条件为Vgs>Vth,这便会导致想要高端MOS导通,则其栅极对地所需的电压较大。
补充说明:因为低端MOS源极接地,想要导通只需要令其栅极电压大于开启电压Vth。而高端MOS源极接到负载,如果高端MOS导通,那么其源极电压将上升到H桥驱动电压,此时如果栅极对地电压不变,那么Vgs可能小于Vth,又关断。因此想要使高端MOS导通,必须想办法使其Vgs始终大于或一段时间内大于Vth(即栅极电压保持大于电源电压+Vth)。
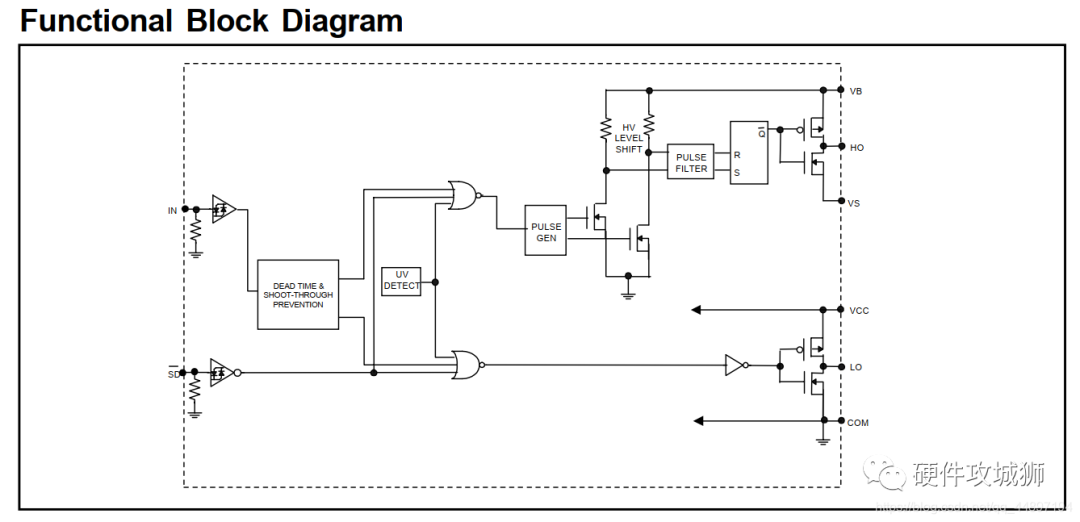
首先看下IR2104S的内部原理框图(来源于数据手册)。此类芯片的内部原理基本类似,右侧两个栅极控制脚(HO和LO)均是通过一对PMOS和NMOS进行互补控制。
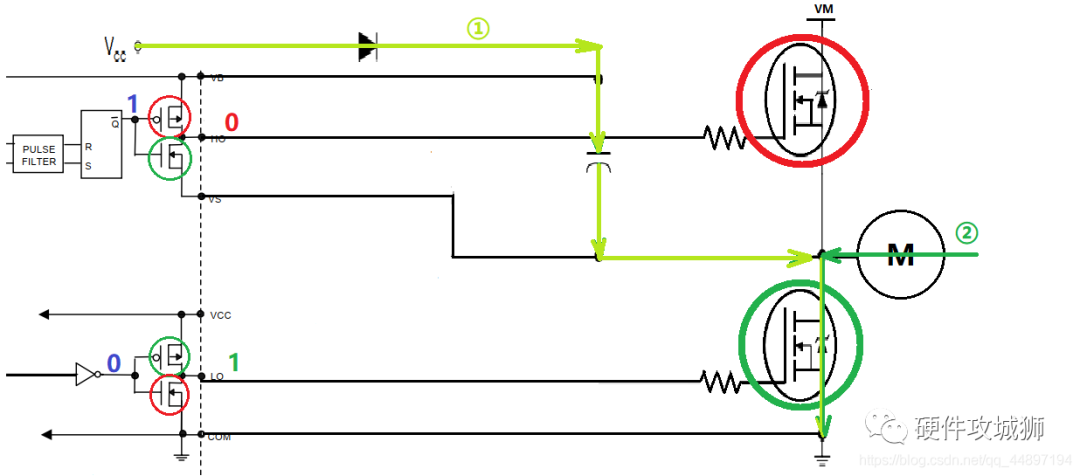
自举电路工作流程图:
以下电路图均只画出半桥,另外一半工作原理相同因此省略。
假定Vcc=12V,VM=7.4V,MOS管的开启电压Vth=6V(不用LR7843的2.3V,原因后续说明)。
(1).第一阶段:首先给IN和SD对应的控制信号,使HO和LO通过左侧的内部控制电路(使上下两对互补的PMOS和NMOS对应导通),分别输出低电平和高电平。此时,外部H桥的高端MOS截止,低端MOS导通,电机电流顺着②线流通。同时VCC通过自举二极管(①线)对自举电容充电,使电容两端的压差为Vcc=12V。
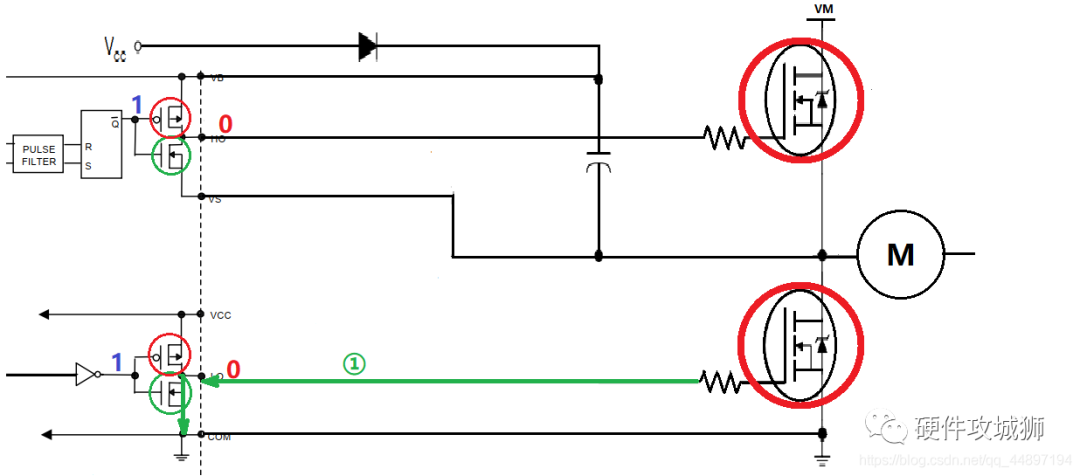
(2).第二阶段:此阶段由芯片内部自动产生,即死区控制阶段(在H桥中介绍过,不能使上下两个MOS同时导通,否则VM直接通到GND,短路烧毁)。HO和LO输出均为低电平,高低端MOS截止,之前加在低端MOS栅极上的电压通过①线放电。
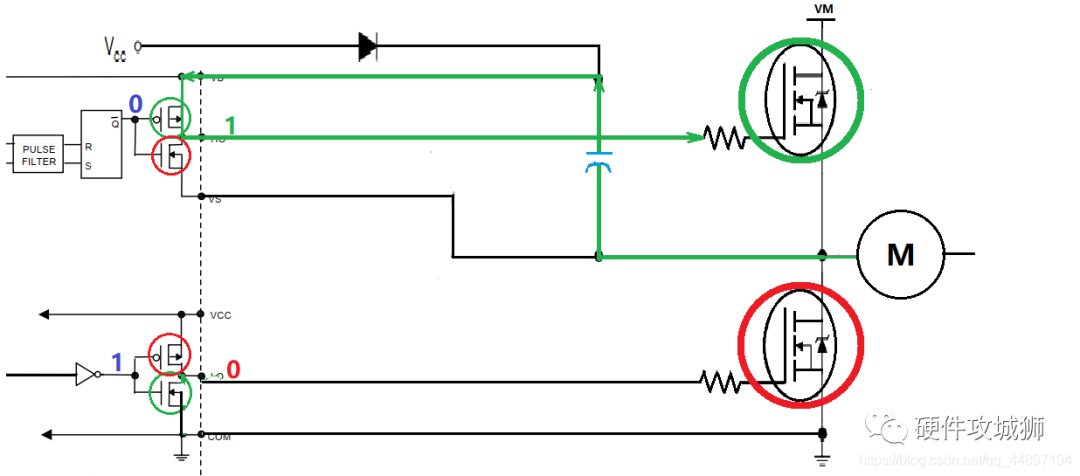
(3).第三阶段:通过IN和SD使左侧的内部MOS管如图所示导通。由于电容上的电压不能突变,此时自举电容上的电压(12V)便可以加到高端MOS的栅极和源极上,使得高端MOS也可以在一定时间内保持导通。此时高端MOS的源极对地电压≈VM=7.4V,栅极对地电压≈VM+Vcc=19.4V,电容两端电压=12V,因此高端MOS可以正常导通。
(此时,自举二极管两端的压差=VM,因此在选择二极管时,需要保证二极管的反向耐压值大于VM。)
注意:因为此时电容在持续放电,压差会逐渐减小。最后,电容正极对地电压(即高端MOS栅极对地电压)会降到Vcc,那么高端MOS的栅源电压便≈Vcc-VM=12V-7.6V=4.4V < Vth=6V,高端MOS仍然会关断。
补充总结:
★因此想要使高端MOS连续导通,必须令自举电容不断充放电,即循环工作在上述的三个阶段(高低端MOS处于轮流导通的状态,控制信号输入PWM即可),才能保证高端MOS导通。自举二极管主要是用来当电容放电时,防止回流到VCC,损坏电路。
★但是,在对上面的驱动板进行实际测试时会发现,不需要令其高低端MOS轮流导通也可以正常工作,这是因为即使自举电容放电结束,即高端MOS的栅源电压下降到4.4V仍然大于LR7843的Vth=2.3V。
那么在上述驱动板中,自举电路就没有作用了吗?当然不是,由于MOS管的特性,自举电路在增加栅源电压的同时,还可令MOS管的导通电阻减小,从而减少发热损耗,因此仍然建议采用轮流导通的方式,用自举电容产生的大压差使MOS管导通工作。
4.控制逻辑
时序控制图:
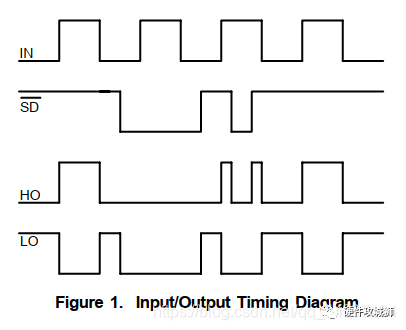
简单看来,就是SD控制输出的开关(高电平有效),IN控制栅极输出脚的高低电平(即H桥MOS管的开关)。
在最上面的驱动板中,SD接到VCC,即处于输出常开状态。只需要对IN脚输入对应控制信号即可进行电机的驱动。
上面为半桥的驱动方式,驱动一个H桥要同时对两个IR2104进行控制。
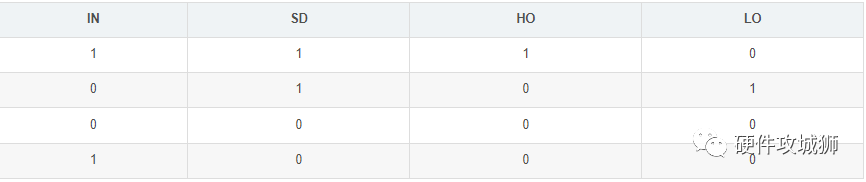
以上面设计的电机驱动板为例,驱动真值表:

改变PWM的占空比,即可改变电机的转速。
五、相关补充
★1.自举二极管一般选用肖特基二极管(比如上述驱动板中的1N5819)。
在自举电容选择时,其耐压值需大于Vcc并留有一定余量(如上述驱动板中为16V的钽电容)。而自举电容的容值选择需要一定的计算。具体可自行查找或参看此链接:自举电容的选择。此驱动板中选用1uF的钽电容,经测试运行稳定。一般来说,PWM的输入频率越大(即电容充放电频率),电容所需容值越小。
★2.H桥MOS管栅极串联的电阻主要用于限流和抑制振荡。为了加快MOS管的关断还可以在栅源之间并联一个10K电阻或在栅极串联电阻上反向并联一个二极管。这部分内容网上可找到较多介绍。
-
解析全桥电机驱动电路工作原理2017-01-20 64414
-
H桥电机驱动电路解析2022-12-29 14709
-
电机驱动芯片A4950及H桥电路分析2023-03-31 21837
-
步进电机H桥驱动电路设计2008-10-21 10043
-
两相混合式步进电机H桥驱动电路设计原理2021-02-19 1951
-
H桥式开关电机驱动电路2009-02-09 2647
-
H桥式电机驱动电路的工作原理2009-07-16 10395
-
基于HIP4081的厚膜H桥电机驱动电路设计解析2010-10-26 5619
-
步进电机H桥型驱动电路设计及其应用2016-08-09 1274
-
步进电机H桥功率驱动电路设计2017-12-12 1635
-
H桥式驱动电路原理解析2018-11-28 54696
-
设计 | 两相混合式步进电机H桥驱动电路设计原理2021-01-31 2532
-
H桥电机驱动电路2023-03-17 1051
-
H桥电机驱动电路电路图 H桥电机驱动电路的工作原理和控制方式2024-06-21 20196
-
h桥驱动电路使电机正反转原理2024-10-06 8149
全部0条评论

快来发表一下你的评论吧 !
