

浅析一下KUKA机器人抓件
描述
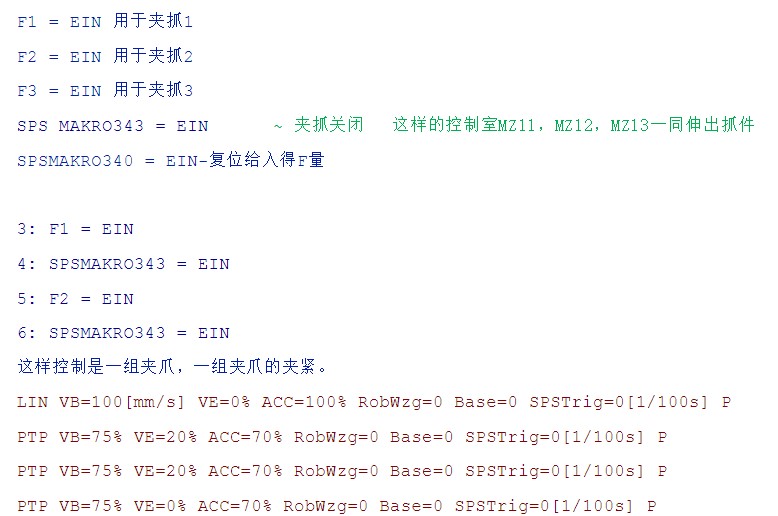
机器人抓件简诉
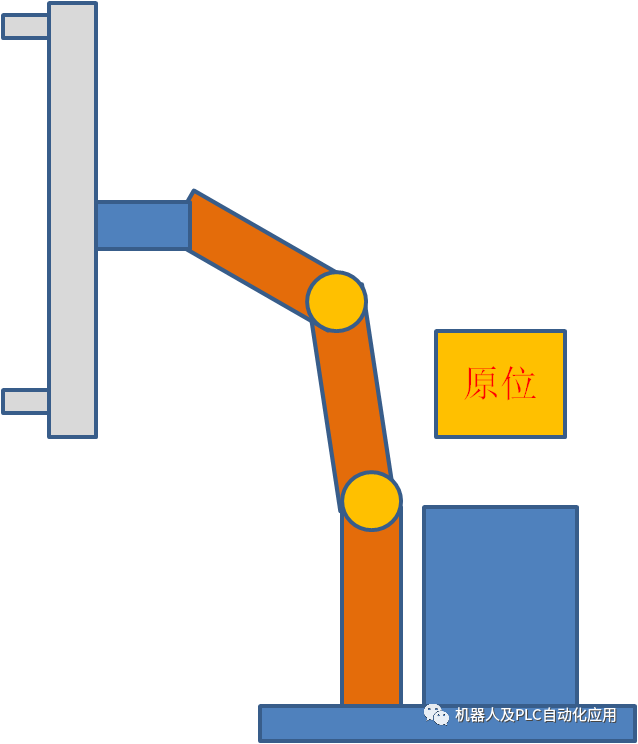
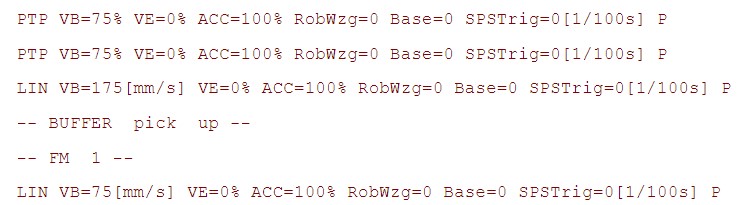
PTP VB=75% VE=0% ACC=100% RobWzg=0 Base=0 SPSTrig=0[1/100s] P
机器人原位将夹爪全部打开,检测没有零件.
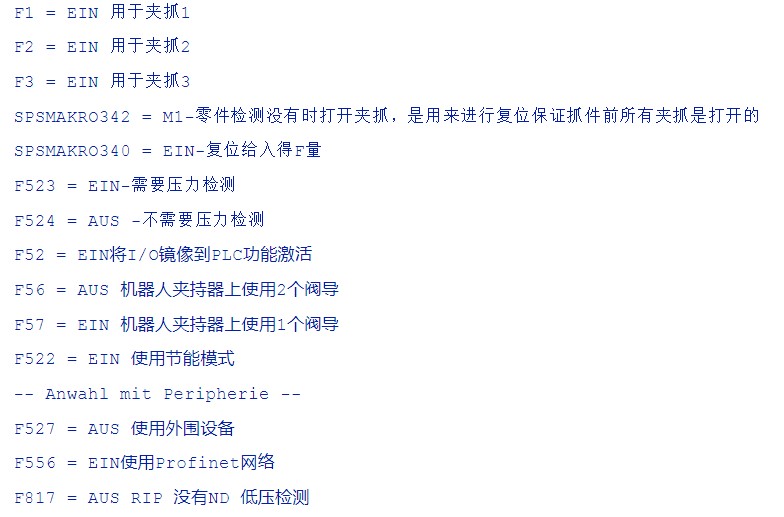
M1-零件检测无件
M2-零件检测有件
M31 - G1-MZ11R
M32 - G1-MZ11V
M33 - G1-MZ12R
M34 - G1-MZ12V
M35 - G1-MZ13R
M36 - G1-MZ13V
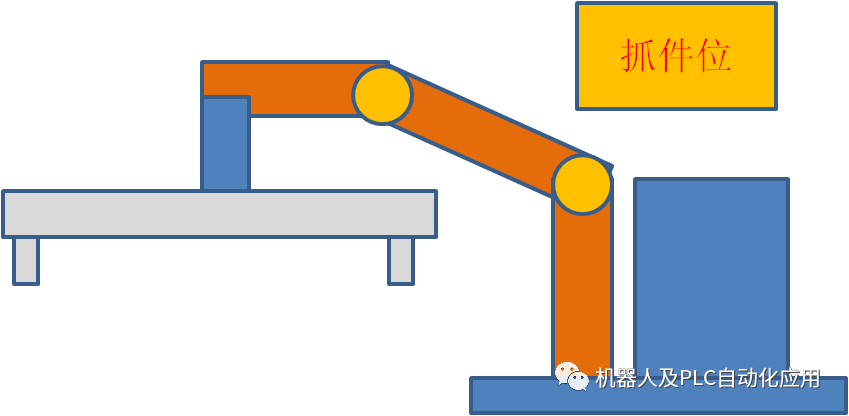
带着工件返回原位。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
浅析机器人定位抓手的使用原则2023-10-31 1638
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 3909
-
KUKA机器人伺服驱动模块维修2021-09-17 1908
-
库卡机器人MGV电源模块维修2021-09-08 1904
-
工业机器人组成结构相关资料分享2021-07-05 2772
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8034
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 10945
-
库卡KUKA机器人四种启动方式介绍2020-09-04 12439
-
KUKA机器人问题解答2019-07-15 2652
-
码垛机器人夹抓可以实现多少种用途2018-08-15 1124
-
KUKA机器人相关分类及型号一览2017-09-29 2014
-
机器人操作系统浅析2016-09-28 3006
-
求KUKA机器人控制柜三维模型2016-04-18 6493
-
KUKA重型机器人2015-02-03 8356
全部0条评论

快来发表一下你的评论吧 !
