

玩嗨OpenHarmony:基于OpenHarmony的智慧牧场方案 3/4 生物运动轨迹跟踪篇
描述

《智慧牧场之生物姿态检测篇》
《智慧牧场之生物心率检测篇》
1. 背景知识1.1 牧场定位的意义
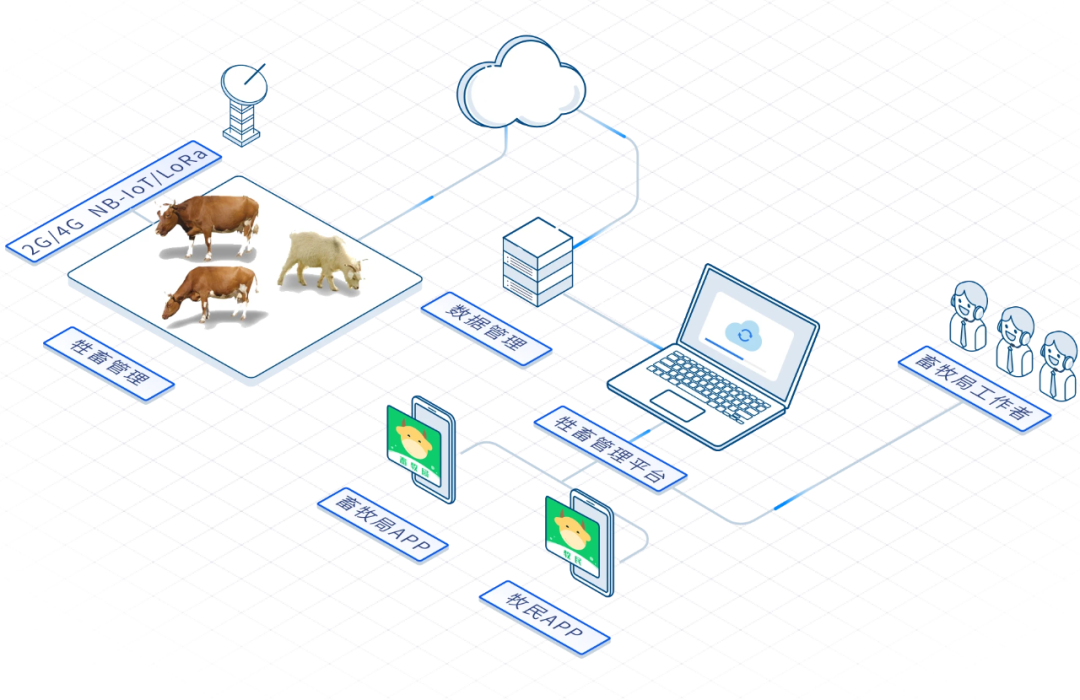
在智慧牧场解决方案中,实时检测牲畜的活动状况是非常重要的环节。现在已经不是放牛和牧羊犬的时代了。面临大范围牧场上牲畜走失,寻找困难,过度放牧导致草场退化等问题,通过穿戴式的生物跟踪部件,可以有效解决以上的问题。
当大量牲畜散布在地面上时,牧场管理员往往发现很难跟踪正在发生的事情。需要一个系统来确定牲畜在任何给定时间的位置和行驶的距离。此外,跟踪系统也会防止任何类型的盗窃,因为牧场管理员可以使用跟踪报告来定位被盗牲畜。
1.2 室外定位技术比较
目前的室外定位技术,大体上分为如下几种类别:
| 信号载体 | 典型定位方式 | 定位精度 | 不足 |
| 北斗/GPS卫星民用领域 | 3个观测方程式求解位置 | 10米级 | 遮挡影响较大 |
| 蜂窝移动网络GSM | 基于TC-OFODM信号进行测距定位 | 100米级 | 对基站依赖程度较高 |
| 5G | 超密集组网下的定位技术/面向5C的TDOA和AOA定位技术、面向5G网络上行定位和下行定位 | 100米级 | 抗干扰有局限性 |
| 惯性导航 | 基于航位推算方法 | 米级 | 存在累计漂移误差 |
| 地球磁场 | 基于信号场强定位或与其他技术组合应用 | 米级 | 地球指纹特征差异小 |
基于GPS和GSM的定位在全世界被广泛使用,可以用来确定其所连接生物的精确位置。这种器件成本低、可靠性高,并具有精确跟踪功能。可以提供有效、实时的物体、生物的位置报告和时间信息。
2. 解决方案概要该方案采用基于全球移动通信系统(GSM)技术和GPS技术的嵌入式系统。该系统安装在生物穿戴设备中。接口GSM模块连接到Hi3861。该系统提供以下功能:a)位置信息,b)使用短信进行实时跟踪。
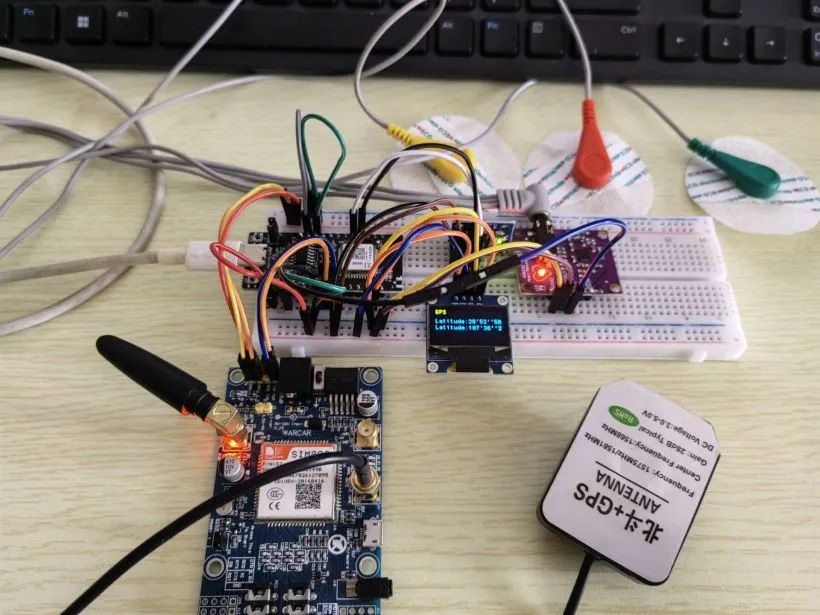
3.1 SIM808模块调制解调器模块
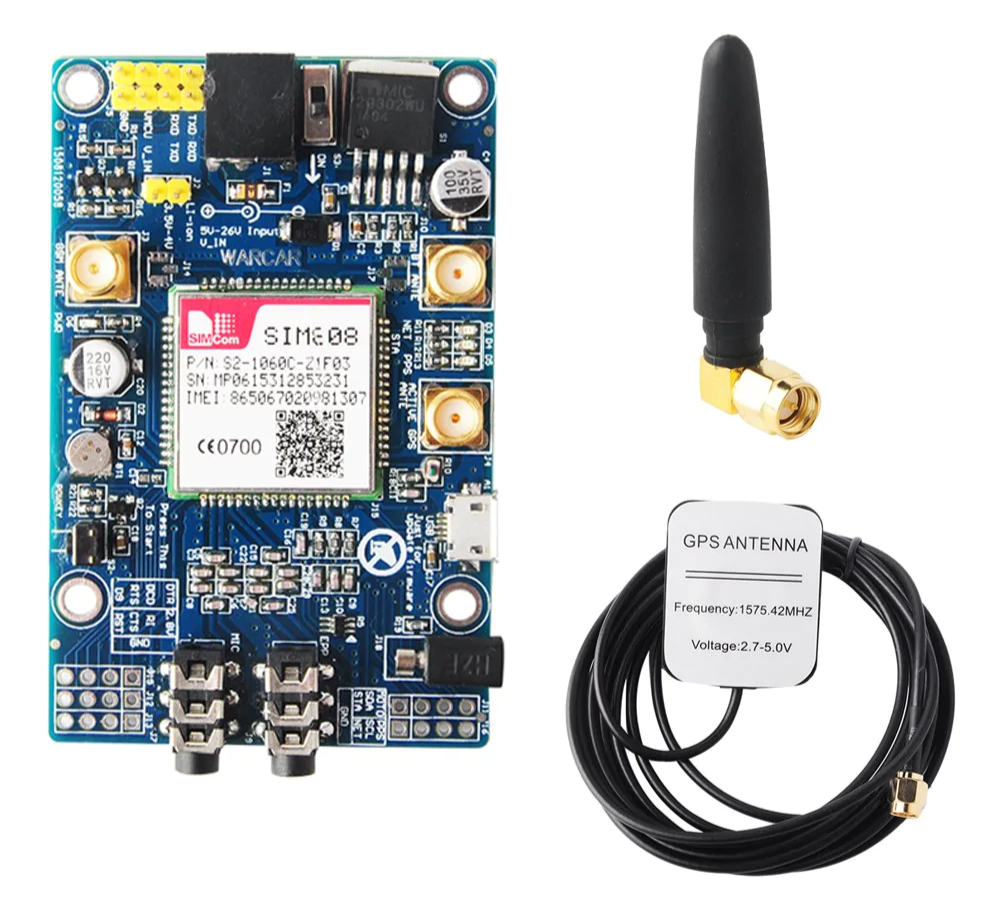
可以选用GSM、GPRS、GPS三合一功能的SIM808模块。支持GSM/GPRS Quad-Band网络,结合GPS技术进行卫星导航。它具有睡眠模式下的超低功耗,并集成了锂离子电池充电电路,使其具有超长的待机时间,方便使用可充电锂离子电池的项目。它具有高 GPS 接收灵敏度,具有 22 个跟踪和 66 个采集接收器通道。模块通过 UART(编者注:Universal Asynchronous Receiver/Transmitter 通用异步接收器/发送器的英文缩写) 由 AT 指令控制,支持 3.3V 和 5V 逻辑电平。
GSM调制解调器的工作基于命令,命令始终以“AT开头”(表示注意),以“<CR>字符结束”,例如拨号命令是ATD<number>;ATD7814629081;这里,拨号命令以分号(;)结束。在Hi3861的帮助下,该AT命令被提供给GSM调制解调器。GSM调制解调器在MAX 232 IC的帮助下与微控制器串行连接。GSM指定的频率范围为1850到1990 MHz(移动台到基站)。
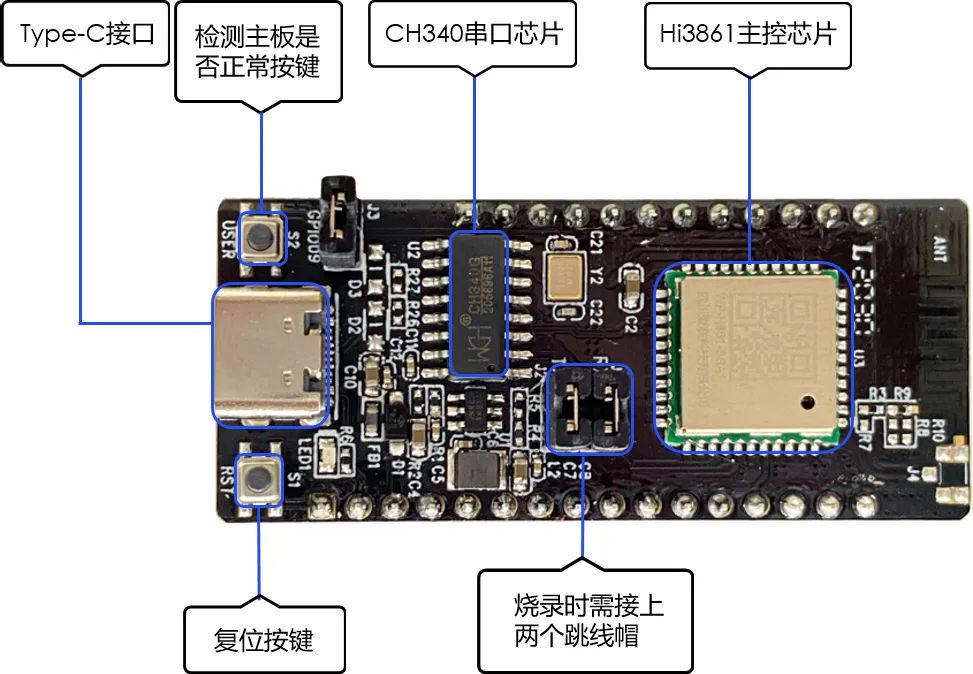
3.2 Hi3861
Hi3861开发板模组大小约2cm*5cm,是一款高度集成的2.4GHz WLAN SoC。
Hi3861芯片集成高性能32bit微处理器、拥有丰富的外设接口,芯片内置SRAM(编者注:Static Random-Access Memory 静态随机存取存储器的英文缩写)和Flash,并支持在Flash上运行程序。
Hi3861模组有2MB FLASH,352KB RAM。但我们编写代码时,要注意对有限资源的合理利用。
Hi3861可以说是麻雀虽小,五脏俱全。Hi3861的外设接口包括(外部主晶振为40M或者24M):
-
2个SPI(Synchronous Peripheral Interface)
-
3个UART(Universal Asynchronous Receiver & Transmitter)
-
2个I2C(The Inter-Integrated Circuit)
-
6路PWM(Pulse Width Modulation)
-
15个GPIO(General Purpose Input/Output)
-
7路ADC(Analog to Digital Converter)
-
1个I2S接口
-
1个高速SDIO2.0(Secure Digital Input/Output)接口,最高时钟可达50MHz;
Hi3861主控功能框架图如下:
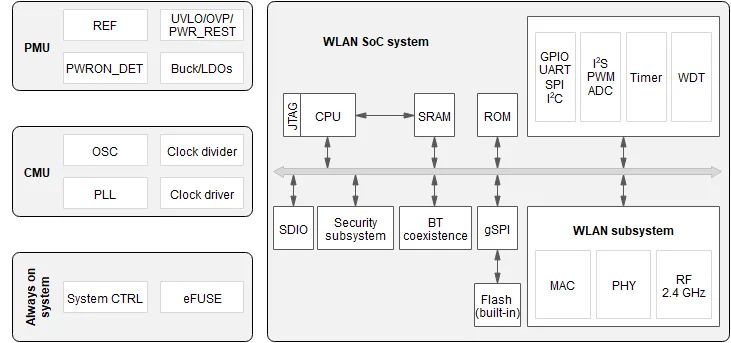
在该系统中,它用于同步GSM和GPS的操作。GPS连续向微控制器发送位置数据,即车辆位置的纬度和经度,而GSM从微控制器发送和接收数据。GPS调制解调器连续提供许多参数作为输出,但只有NMEA(编者注:National Marine Electronics Association 国家海洋电子协会的英文缩写)数据被读取并“显示在OLED上”。将相同的数据发送给移动用户,以便可以知道车辆的确切位置。用户的移动号码存储在EEPROM(编者注:Electrically Erasable Programmable read only memory 带电可擦可编程只读存储器 的英文缩写)中。
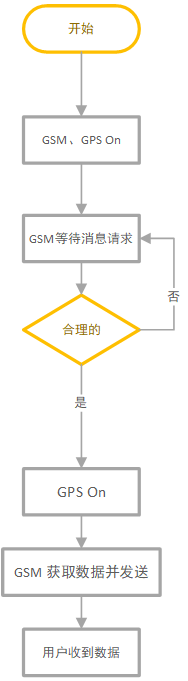
4. 软件设计软件编程是用C语言完成的。GPS从卫星接收的数据(坐标)在软件中定义。解码NMEA(国家海洋电子协会)协议是开发该软件的主要目的。软件程序中应包含用户的手机号码,以便从我们在GSM调制解调器中使用的SIM卡接收位置值。NMEA协议由一组ASCII字符集的消息组成。GPS接收数据并以ASCII逗号分隔的消息字符串的形式显示。$'在每条消息的开头使用符号。位置(纬度和经度)的格式为ddmm。mmmm(度数分钟和十进制分钟)。软件协议由GGA(编者注:Global Positioning System Fix Data 全球定位系统固定数据)和GLL(编者注:Geographic Position 地理位置-纬度/经度)组成。但在这个系统中,我们只使用GGA。系统流程图如下所示:
具体代码实现:
/***** 获取电压值函数 *****/
static float GetVoltage(void)
{
unsigned int ret;
unsigned short data;
ret = AdcRead(WIFI_IOT_ADC_CHANNEL_5, &data, WIFI_IOT_ADC_EQU_MODEL_8, WIFI_IOT_ADC_CUR_BAIS_DEFAULT, 0xff);
if (ret != WIFI_IOT_SUCCESS)
{
printf("ADC Read Fail
");
}
return (float)data * 1.8 * 4 / 4096.0;
}
/* input:AT+CGNSINF Command Response
* output:struct GGPS_DATA
*/
static void GPS_CGNSINF_Analyze(char *origin, GGPS_DATA *gpsdata)
{
int counter = 0;
char tmp[150] = {0};
char *lptr = NULL;
char *localptr = NULL;
lptr = (char *)strstr(origin, "+CGNSINF");
if (lptr == NULL)
{
return;
} else {
lptr += 10;
}
while (*lptr != '')
{
if (*lptr == ',' && *(lptr + 1) == ',')
{
tmp[counter] = *lptr;
counter++;
tmp[counter] = '0';
} else if (*lptr == '
' && *(lptr + 1) == '
' && counter < 148)
{
tmp[counter] = '0';
tmp[counter + 1] = ',';
tmp[counter + 2] = 0;
break;
} else {
tmp[counter] = *lptr;
}
lptr++;
counter++;
/* avoid array out of range */
if (counter >= GNSINF_MSG_MAX_LEN){
return;
}
}
/* Clear struct data */
memset(gpsdata, 0, sizeof( GGPS_DATA));
localptr = (char *)strtok(tmp, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->GNSSrunstatus, localptr, sizeof(gpsdata->GNSSrunstatus));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->Fixstatus, localptr, sizeof(gpsdata->Fixstatus));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->UTCdatetime, localptr, sizeof(gpsdata->UTCdatetime));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->latitude, localptr, sizeof(gpsdata->latitude));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->logitude, localptr, sizeof(gpsdata->logitude));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->altitude, localptr, sizeof(gpsdata->altitude));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->speedOTG, localptr, sizeof(gpsdata->speedOTG));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->course, localptr, sizeof(gpsdata->course));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->fixmode, localptr, sizeof(gpsdata->fixmode));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->Reserved1, localptr, sizeof(gpsdata->Reserved1));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->HDOP, localptr, sizeof(gpsdata->HDOP));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->PDOP, localptr, sizeof(gpsdata->PDOP));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->VDOP, localptr, sizeof(gpsdata->VDOP));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->Reserved2, localptr, sizeof(gpsdata->Reserved2));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->satellitesinview, localptr, sizeof(gpsdata->satellitesinview));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->GNSSsatellitesused, localptr, sizeof(gpsdata->GNSSrunstatus));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->GLONASSsatellitesused, localptr, sizeof(gpsdata->GLONASSsatellitesused));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->Reserved3, localptr, sizeof(gpsdata->Reserved3));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->CN0max, localptr, sizeof(gpsdata->CN0max));
localptr = (char *)strtok(NULL, ",");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->HPA, localptr, sizeof(gpsdata->HPA));
localptr = (char *)strtok(NULL, "
");
if (localptr == NULL)
{
return;
}
strncpy(gpsdata->VPA, localptr, sizeof(gpsdata->VPA));
}
static void GsmCheckRingAndHanupMessage(void)
{
if (strstr(g_uart_buff, "RING") != NULL)
{
printf("ring.
");
if (GsmGetConnectSts() == false)
{
GsmSetRingSts(true);
}
}
if (strstr(g_uart_buff, "NO CARRIER") != NULL)
{
printf("hang up.
");
GsmSetHungUpSts(true);
if (GsmGetConnectSts() == true)
{
GsmSetConnectSts(false);
}
}
}
static uint32_t GsmSendCmd(char *cmd, int len)
{
if (cmd == NULL || len <= 0)
{
return HI_ERR_FAILURE;
}
uint32_t ret = HI_ERR_FAILURE;
static uint32_t count = 0;
uint8_t *uart_buff_ptr = g_uart_buff;
ret = hi_uart_write(DEMO_UART_NUM, (hi_u8 *)cmd, len);
if (ret == HI_ERR_FAILURE)
{
return HI_ERR_FAILURE;
}
printf(" SendData%d,cmd:%s.
", len, cmd);
while (g_uartController.isReadBusy)
{
count++;
if (count > UART_WAIT_COUNT_MAX)
{
break;
}
}
if (g_uartController.isReadBusy)
{
printf("GsmSendCmd hi_uart_read busy return");
return HI_ERR_FAILURE;
}
if (!g_uartController.isReadBusy){
usleep(100000); /* sleep 100ms */
}
g_uartController.isReadBusy = true;
g_ReceivedDatalen = hi_uart_read(DEMO_UART_NUM, uart_buff_ptr, UART_BUFF_SIZE);
if (g_ReceivedDatalen > 0)
{
printf(" rcvData len:%d,msg:%s.
", g_ReceivedDatalen, g_uart_buff);
if (strstr(g_uart_buff, "OK") != NULL)
{
GsmCheckRingAndHanupMessage();
memset(g_uart_buff, 0, sizeof(g_uart_buff));
g_ReceivedDatalen = 0;
g_uartController.isReadBusy = false;
return HI_ERR_SUCCESS;
}
else
{
printf(" received error cmd
");
GsmCheckRingAndHanupMessage();
memset(g_uart_buff, 0, sizeof(g_uart_buff));
g_ReceivedDatalen = 0;
g_uartController.isReadBusy = false;
return HI_ERR_FAILURE;
}
}
else
{
g_uartController.isReadBusy = false;
printf(" SendCmd no cmd return!
");
return HI_ERR_FAILURE;
}
return HI_ERR_SUCCESS;
}
uint32_t GpsGetLocation(GGPS_INFO *gpsInfo)
{
uint32_t ret = HI_ERR_FAILURE;
static uint32_t count = 0;
uint8_t *uart_buff_ptr = g_uart_buff;
ret = hi_uart_write(DEMO_UART_NUM, (hi_u8 *)"AT+CGNSINF
", strlen("AT+CGNSINF
"));
if (ret == HI_ERR_FAILURE)
{
return NULL;
}
while (g_uartController.isReadBusy)
{
count++;
if (count > UART_WAIT_COUNT_MAX)
{
break;
}
usleep(100000); /* sleep 100ms */
}
if (g_uartController.isReadBusy)
{
printf("GpsGetLocation hi_uart_read busy return");
return HI_ERR_FAILURE;
}else{
usleep(100000); /* sleep 100ms */
}
g_uartController.isReadBusy = true;
g_ReceivedDatalen = hi_uart_read(DEMO_UART_NUM, uart_buff_ptr, UART_BUFF_SIZE);
if (g_ReceivedDatalen > 0)
{
printf(" rcvData len:%d,msg:%s.
", g_ReceivedDatalen, g_uart_buff);
uint8_t *strLocation = (uint8_t *)strstr(g_uart_buff, "+CGNSINF: 1,1");
if (strLocation != NULL)
{
GGPS_DATA gpsData;
GPS_CGNSINF_Analyze((char *)g_uart_buff, &gpsData);
printf("latitude:%s.
", gpsData.latitude);
printf("logitude:%s.
", gpsData.logitude);
memcpy_s(gpsInfo->UTCdatetime, sizeof(gpsInfo->UTCdatetime), gpsData.UTCdatetime, sizeof(gpsData.UTCdatetime));
memcpy_s(gpsInfo->logitude, sizeof(gpsInfo->logitude), gpsData.logitude, sizeof(gpsData.logitude));
memcpy_s(gpsInfo->latitude, sizeof(gpsInfo->latitude), gpsData.latitude, sizeof(gpsData.latitude));
memcpy_s(gpsInfo->satellitesinview, sizeof(gpsInfo->satellitesinview), gpsData.satellitesinview, sizeof(gpsData.satellitesinview));
GsmCheckRingAndHanupMessage();
memset(g_uart_buff, 0, sizeof(g_uart_buff));
g_ReceivedDatalen = 0;
g_uartController.isReadBusy = false;
return HI_ERR_SUCCESS;
} else {
GsmCheckRingAndHanupMessage();
memset(g_uart_buff, 0, sizeof(g_uart_buff));
g_ReceivedDatalen = 0;
g_uartController.isReadBusy = false;
return HI_ERR_FAILURE;
}
} else {
printf(" SendCmd no cmd return!
");
g_uartController.isReadBusy = false;
return HI_ERR_FAILURE;
}
}
uint32_t GsmCallCellPhone(char *cellPhoneNumeber)
{
uint32_t ret = HI_ERR_FAILURE;
char sendCmd[32] = "";
uint8_t cPhoneNumLength = strlen(cellPhoneNumeber);
if (cPhoneNumLength < PHONE_NUMB_LEN)
{
return HI_ERR_FAILURE;
}
/* Send AT+CSQ. */
strncpy(sendCmd, "AT+CSQ
", strlen("AT+CSQ
"));
printf(" sendCmd=%s
", sendCmd);
ret = GsmSendCmd(sendCmd, strlen(sendCmd));
if (ret == HI_ERR_FAILURE)
{
return HI_ERR_FAILURE;
}
memset(sendCmd, 0, strlen(sendCmd));
/* Call cellPhone Number:ATD+cellPhoneNumber. */
snprintf(sendCmd, sizeof(sendCmd), "ATD%s;
", cellPhoneNumeber);
printf(" sendCmd=%s
", sendCmd);
ret = GsmSendCmd(sendCmd, strlen(sendCmd));
if (ret == HI_ERR_FAILURE)
{
return HI_ERR_FAILURE;
}
return HI_ERR_SUCCESS;
}

未完待续……
后期预告《智慧牧场之室内管理系统篇》 写在最后我们最近正带着大家玩嗨OpenHarmony。如果你有好玩的东东,欢迎投稿,让我们一起嗨起来!有点子,有想法,有Demo,立刻联系我们:合作邮箱:zzliang@atomsource.org
 |













原文标题:玩嗨OpenHarmony:基于OpenHarmony的智慧牧场方案 3/4 生物运动轨迹跟踪篇
文章出处:【微信公众号:开源技术服务中心】欢迎添加关注!文章转载请注明出处。
- 相关推荐
- 热点推荐
- 开源技术
- OpenHarmony
-
玩嗨OpenHarmony:基于OpenHarmony的ArkUI翻页时钟2022-12-05 2720
-
基于OpenHarmony的智慧牧场方案:室内管理系统篇2022-11-29 2996
-
基于OpenHarmony的智慧牧场方案:生物运动轨迹跟踪篇2022-11-25 2551
-
基于OpenHarmony的智慧牧场方案:生物心率检测篇2022-11-22 1994
-
基于OpenHarmony的智慧牧场方案:生物姿态检测篇2022-11-21 2331
-
玩嗨OpenHarmony:基于OpenHarmony的智慧农业环境监控系统2022-11-10 4133
-
玩嗨OpenHarmony:基于OpenHarmony的智慧牧场方案 4/4 室内管理系统篇2022-11-08 2405
-
玩嗨OpenHarmony:基于OpenHarmony的智慧牧场方案 2/4 生物心率检测篇2022-11-05 2741
-
玩嗨OpenHarmony:基于OpenHarmony的智慧牧场方案 1/4 生物姿态检测篇2022-11-03 2146
-
玩嗨OpenHarmony:基于OpenHarmony的道路维护方案2022-11-02 2422
-
玩嗨OpenHarmony:基于OpenHarmony的机械狗进阶版——听话的狗子2022-11-01 3060
-
玩嗨OpenHarmony:基于OpenHarmony的仿生四足狗开发分享2022-10-31 5382
-
基于OPenHarmony的智慧牧场#鸿蒙韩 2022-09-23
-
基于OpenHarmony的智慧牧场2022-08-26 44760
全部0条评论

快来发表一下你的评论吧 !
