

全阶模型磁链观测器学习
电子说
描述
导读:本期主要介绍异步电机的全阶磁链观测器。从工作原理到带入到矢量控制中,比较不同观测器的估计效果对电机控制性能的影响大小。
一、研究背景
磁链是高性能交流感应电机调速系统实现的关键,而磁链在实际应用中一般不采用传感器直接检测,所以现代交流电力传动控制系统通常用磁链观测模型来进行估计。
异步电机磁链观测的准确性直接影响电机控制的准确性和稳定性。传统的开环电流模型和电压模型在低速段和高速段都受到电机参数等因素的限制,严重制约电机的输出特性。全阶磁链观测器是闭环系统,通过对反馈矩阵的设计,可以在全速范围内能较为准确的估计定、转子磁链。
二、工作原理
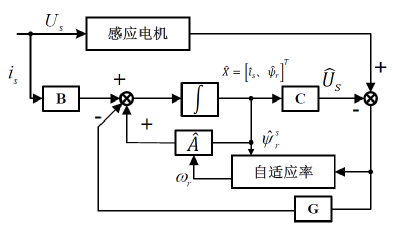
图1全阶磁链观测器系统结构框图
全阶磁链观测器的主要思想是将感应电机模型作为参考,把状态估计的方程作为可调节部分。这两部分具有相同物理意义的输出量,利用两个部分的输出量误差再经过反馈校正通道对状态观测值进行修正,使观测值快速地跟踪上实际值。模型参考自适应系统的(Model Reference Adaptive System,MRAS)思想有效地提高了全阶磁链观测器的动态性能和抗扰动性能。
三、仿真搭建
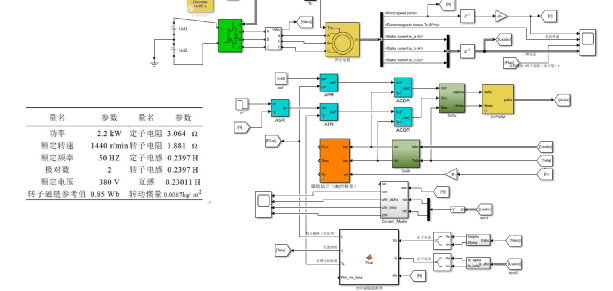
图2 基于全阶磁链观测器的异步电机矢量控制系统仿真
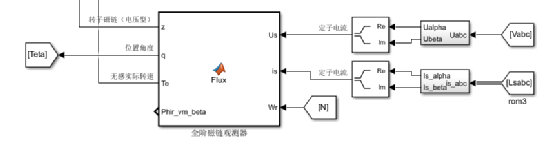
图3全阶磁链观测器系统仿真
四、仿真波形分析
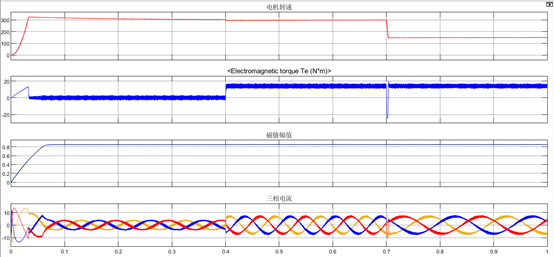
图4dq坐标系下的电流型磁链观测器
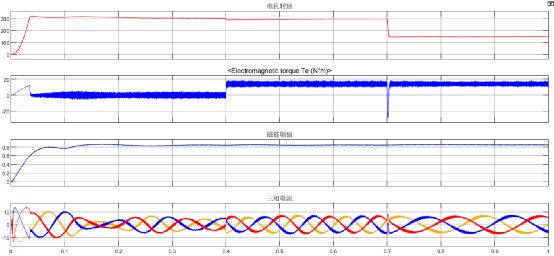
图5 全阶磁链观测器
从图4和图5比较发现,在低速区域,基于全阶磁链观测器的控制性能更好。
五、总结
模型参考自适应系统的(Model Reference Adaptive System,MRAS)思想有效地提高了全阶磁链观测器的动态性能和抗扰动性能。相比较开环磁链观测器(电流型和电压型磁链观测器),全阶磁链观测器(闭环磁链观测器)在全速范围内具有更高的估算精度和参数鲁棒性。
审核编辑:汤梓红
-
两种感应电机磁链观测器的参数敏感性研究2025-06-09 349
-
基于全阶模型磁链观测器的异步电机矢量控制2023-11-09 3193
-
异步电机的改进型电压模型磁链观测器介绍2023-08-19 3441
-
异步电机速度估计-混合模型磁链观测器法2023-05-18 2167
-
基于电流型磁链观测器的异步电机矢量控制学习2023-03-30 893
-
异步电机混合模型转子磁链观测器学习2022-11-21 3067
-
磁链观测器在异步电机矢量控制中的应用2022-09-06 3615
-
如何去实现一种基于磁链模型的非线性观测器设计呢2021-11-19 2804
-
基于降阶隆伯格观测器的永磁同步电机转子位置估算2021-04-02 6296
-
基于二阶广义积分器的永磁同步电机定子磁链观测方法2018-10-19 3832
-
基于二阶广义积分器的永磁同步电机定子磁链观测方法介绍2018-07-11 11299
-
基于PI-PLL磁链观测器的SVM-DTC系统仿真2017-11-08 1957
-
异步电机全阶磁链观测器反馈矩阵设计_邓歆2017-01-08 901
-
求大神指导matlab设计观测器2013-04-16 7532
全部0条评论

快来发表一下你的评论吧 !
