

下方进行ABB机器人IRB1200转数计数器操作方法
描述
ABB机器人6个关节轴都有一个机械原点的位置
在以下情况需要对机械原点位置进行转数计数器更新操作:
1.更换伺服电机转数计数器电池后。
2.当转数计数器发生故障,修复后。
3.转数计数器与测量板之间断开过以后
4.断电后,机器人关节轴发生了位移。
5.当系统报警提示“10036转数计数器未更新”时。
下方进行ABB机器人IRB1200转数计数器操作方法
01
key:使用手动操纵让机器人各关节轴运动到机械原点刻度位置的顺序是:4—5—6—1—2—3。
机器人六个关节轴的机械原点刻度位置如下图所示。

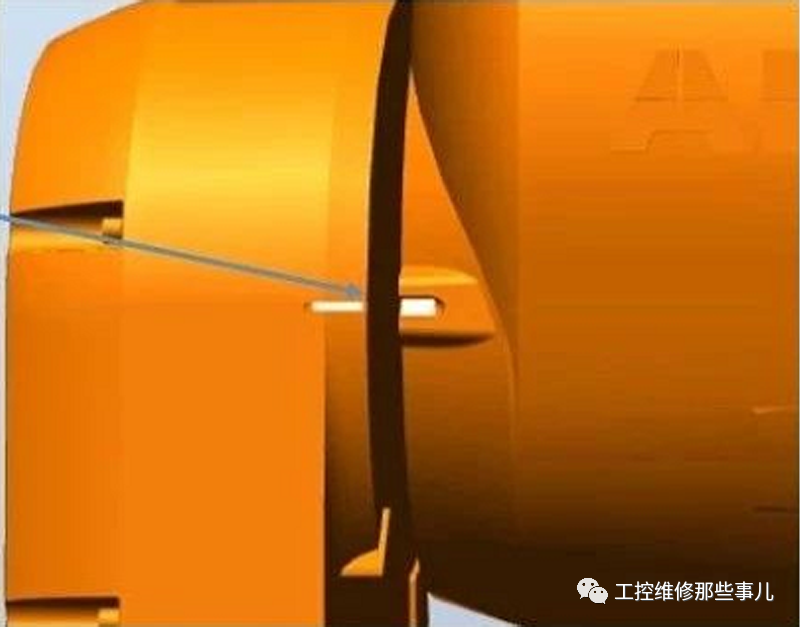
02
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴4运动到机械原点的刻度位置(下图箭头所示)。

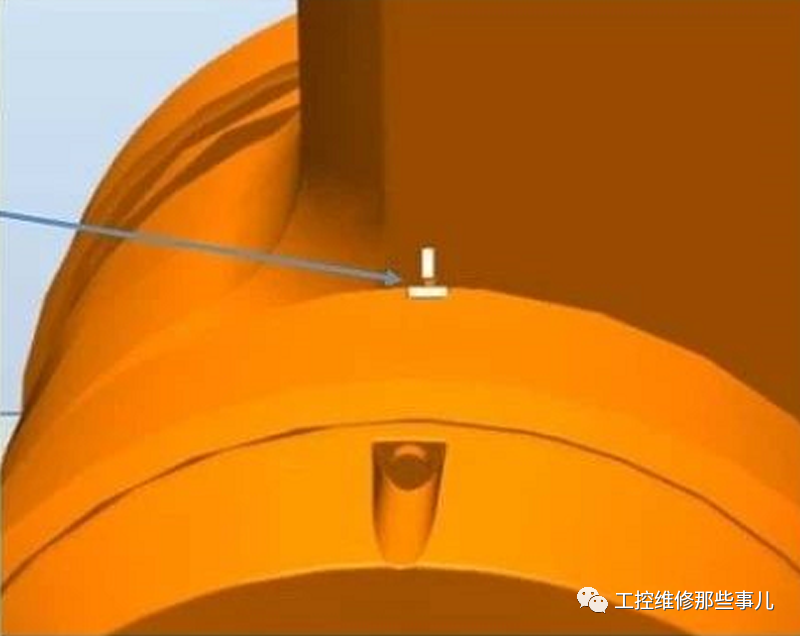
03
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴5运动到机械原点的刻度位置(下图箭头所示)。

04
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴6运动到机械原点的刻度位置(下图箭头所示)。
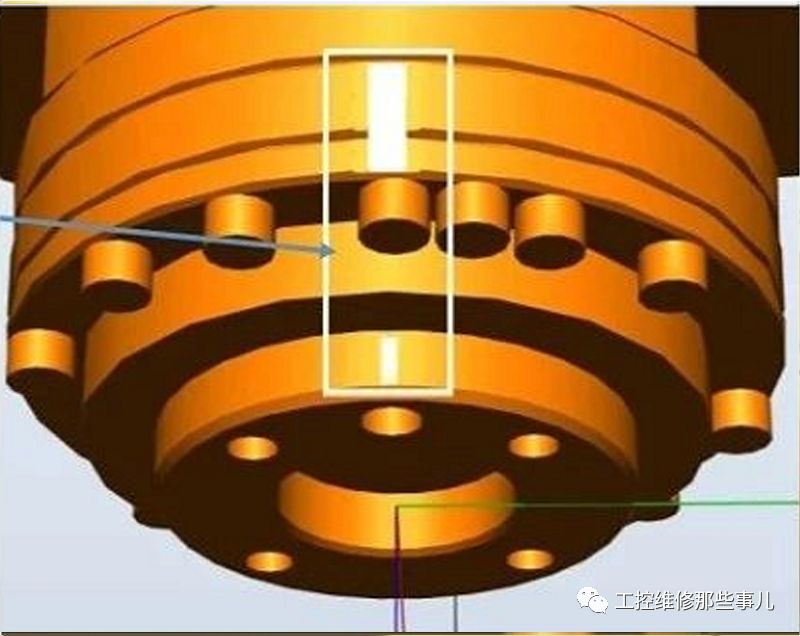
05
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴1运动到机械原点的刻度位置(下图箭头所示)。

06
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴2运动到机械原点的刻度位置(下图箭头所示)。
07
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴3运动到机械原点的刻度位置(下图箭头所示)。
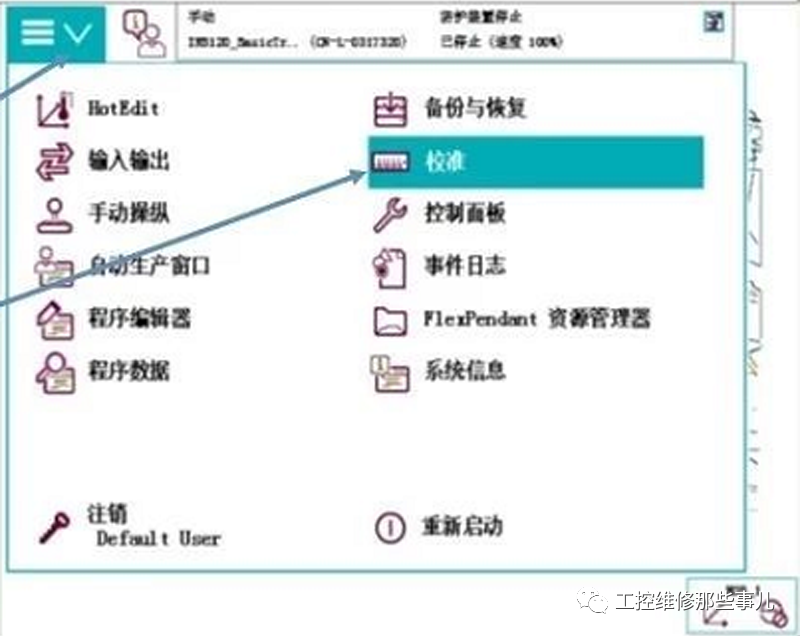
08
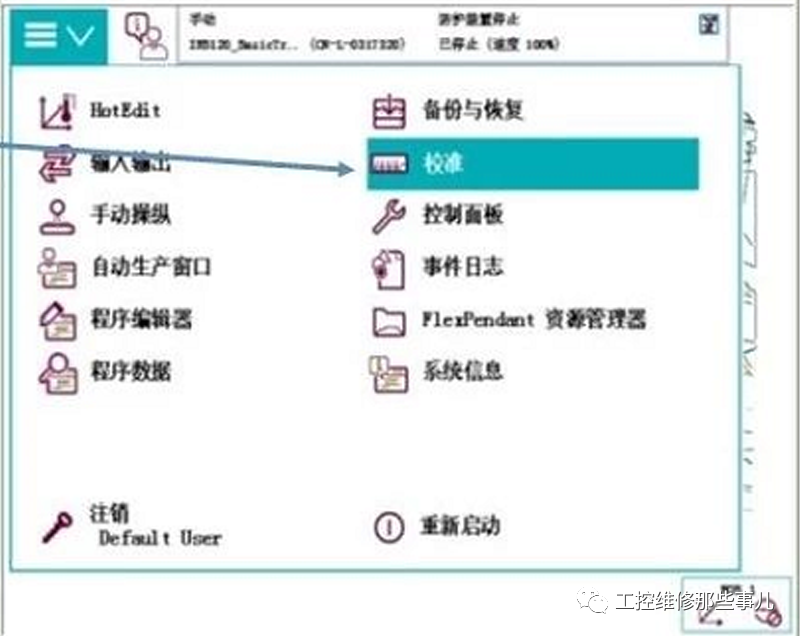
先点击左上角的主菜单
然后选择“校准”。
09
点击“POB_01”

10
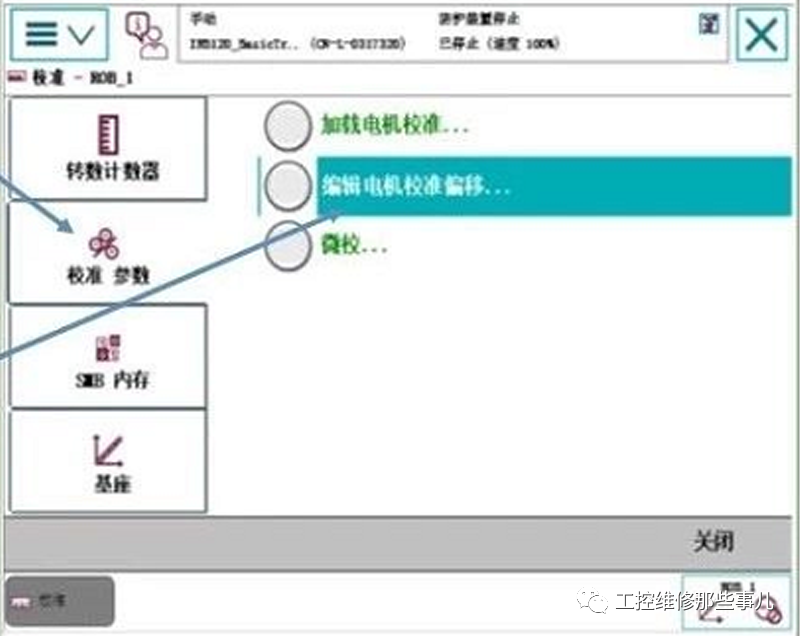
先选择“校准参数”。
再选择“编辑点击校准偏移”。
11
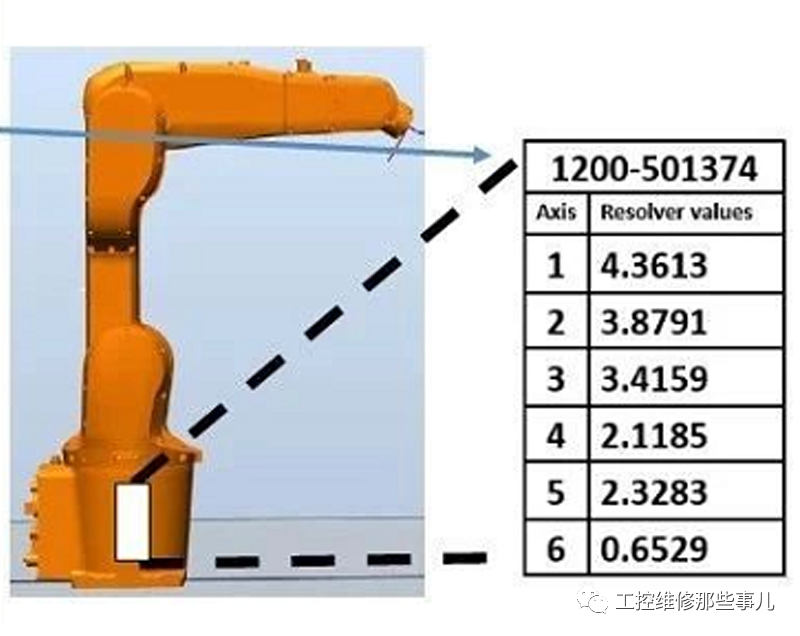
将机器人本体上电机校准偏移记录下来,后面会用到。
12
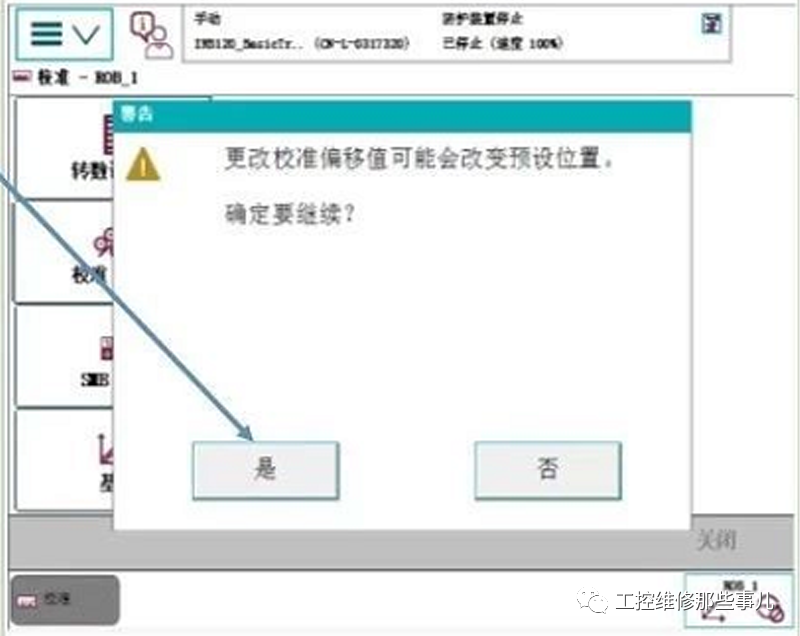
点击“是”
13
输入刚才从机器人本体记录的电机校准偏移数据,然后点击“确定”。
如果示教器中显示的数值与本体上的标签数值相同,则不需修改,直接点击“取消”退出,跳到第17步。

14
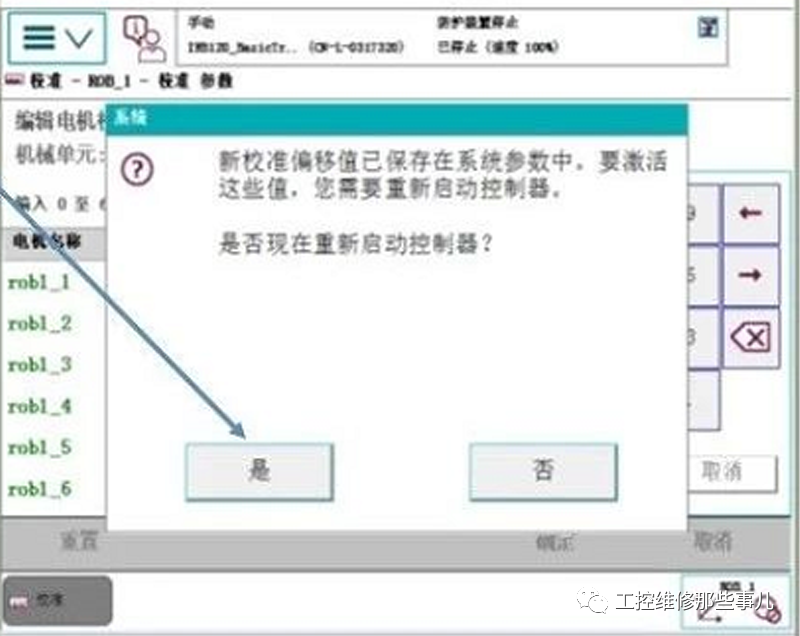
点击“是”
15
重新启动控制器后,点击“校准”。
16
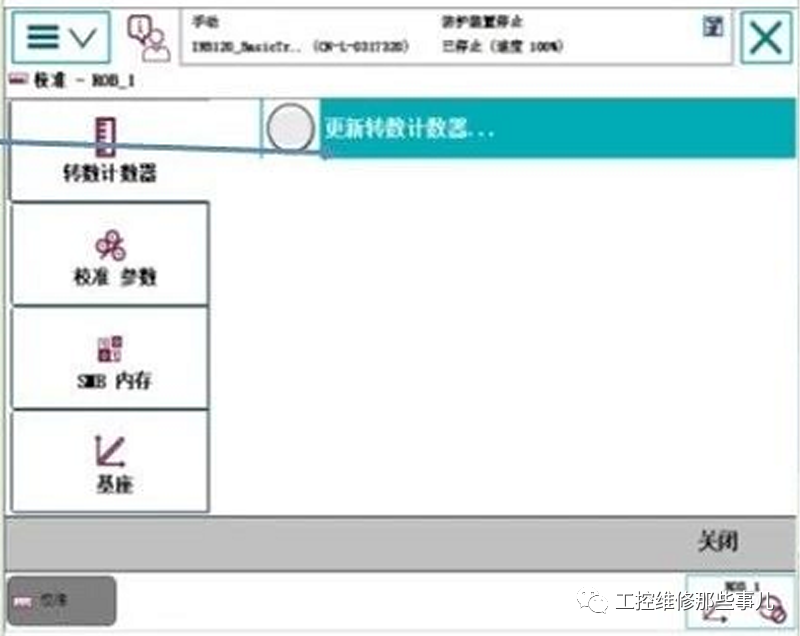
点击“ROB_1”

17
点击“更新转数计数器”。
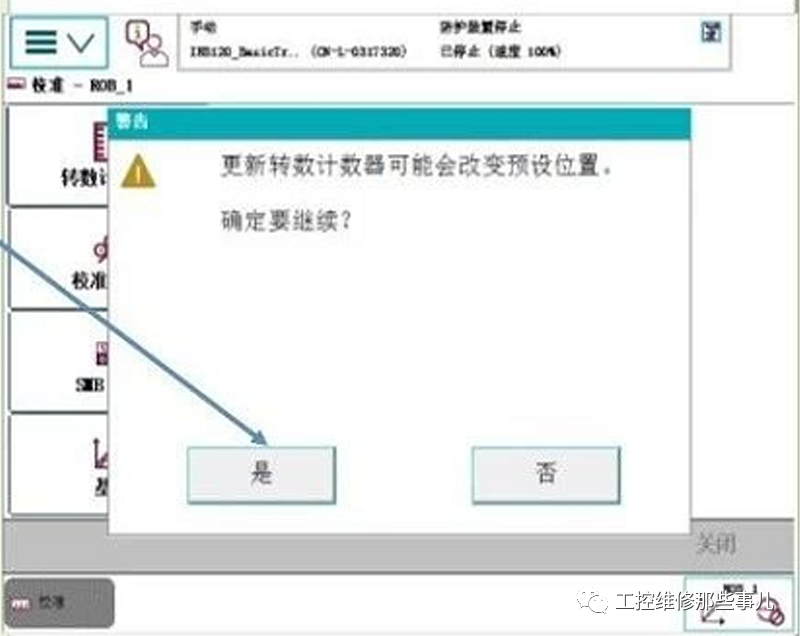
18
点击“是”
19
点击“确认”。
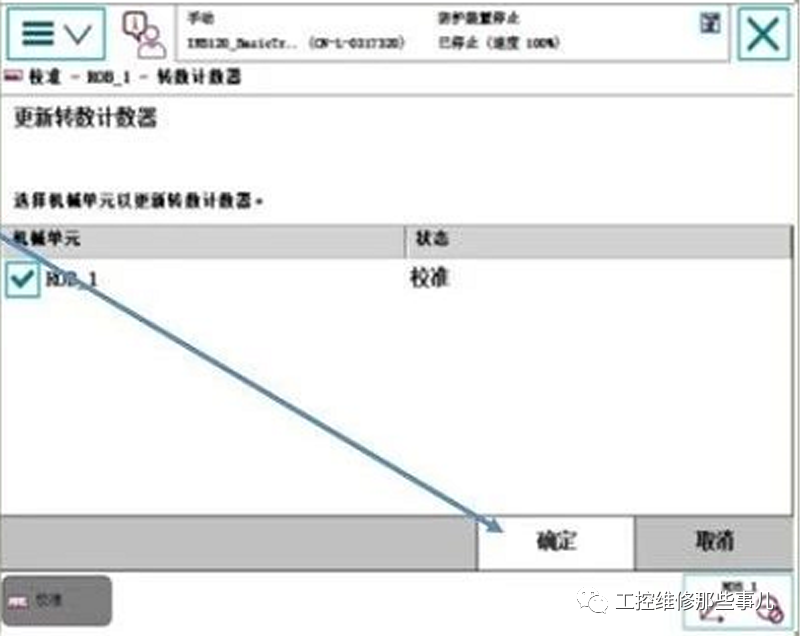
20
key:如果机器人由于安装位置的关系,无法六个轴同时到达机械原点刻度位置,则可以逐个对关节轴进行转数计数器更新。
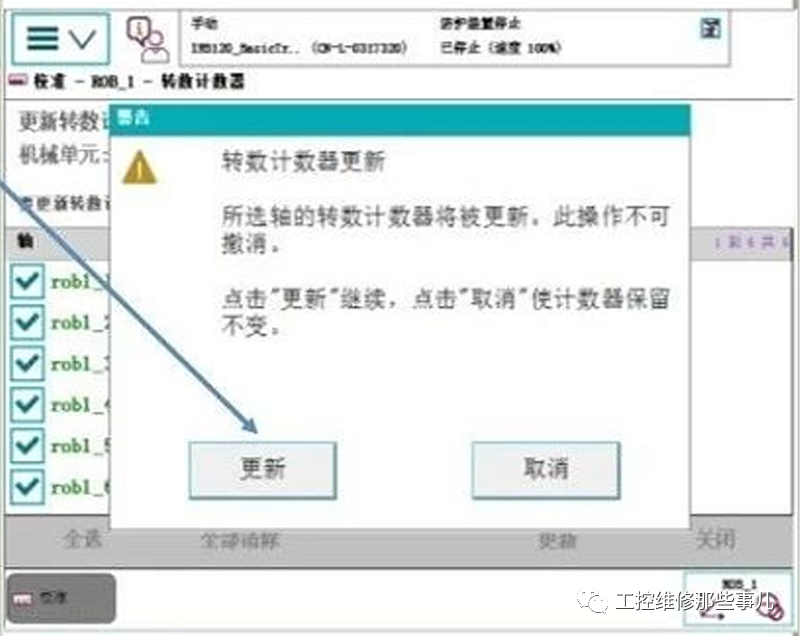
点击“全选”,然后点击“更新”。

21
点击“跟新”。
审核编辑 :李倩
-
ABB机器人示教器转数计数器更新的步骤2023-06-07 11483
-
ABB机器人实训平台实验2021-07-01 2788
-
码垛机器人的操作方法2021-06-10 5347
-
ABB-IRB140工业机器人技术样本2021-05-17 1292
-
ABB机器人的基本操作、运行2021-05-14 2008
-
ABB-IRB2400工业机器人技术样本2021-05-13 1457
-
ABB工业机器人IRB-6650S-手册2021-05-11 1543
-
RCX240S 雅马哈机器人控制器维修保养2020-10-31 4278
-
苏州ABB机器人伺服电机维修,ABB伺服电机维修2020-10-27 2133
-
ABB全球首发IRB 1300小型机器人2020-09-21 6310
-
垃圾分类机器人亮相进博会,各种垃圾分得清清楚楚2019-11-08 4476
-
面向ABB IRB4600机器人的虚拟示教系统研究2018-02-26 1487
-
ABB六轴工业机器人IRB120技术参数2015-12-23 5073
-
ABB IRB5400-喷涂工业机器人2015-01-14 10159
全部0条评论

快来发表一下你的评论吧 !
