

如何防止光学像差/减少光学像差的负面影响
描述
什么是光学像差?
为了获得最佳图像质量,必须校正镜头光学像差。如果没有适当校正,图像最终会变模糊并丢失重要的图像数据。本文重点介绍了六种光学像差,这些光学像差产生的原因,以及如何防止光学像差/减少光学像差的负面影响。
光学像差是指镜头设计上的缺陷,这种缺陷导致光线扩散,而不是聚焦形成清晰的图像,它包括图像中的所有光线、仅某些点或边缘失焦。成像时会出现多种类型的光学像差。制造一个可以校正所有潜在像差的理想视觉系统将会大幅增加镜头的成本。在实践中,镜头总会存在某种形式的像差,但重要的是尽量减少像差的影响。因此,镜头设计制造通常都会做出一些妥协。
为了解释像差如何使图像模糊,首先需要解释一下:什么是弥散圆?来自目标的光点到达镜头然后会聚在传感器上时,图像会很清晰。但是如果光点会聚于传感器前后,则传感器上的光线会广泛分布、扩散。图1中可以看到这种情况,其中可以看到点光源会聚在传感器上,但随着传感器位置的变化,沿传感器散布的光量也会发生变化。
光线越分散,图像就越无法聚焦。除非光圈很小,否则图像中距离较远的目标通常会使背景或前景失焦。这是因为在前景中会聚的光会与来自背景中较远目标的光在不同的点上聚焦。
如需了解更多在视觉系统中利用光圈优势的信息,请阅读Teledyne Lumenera的博文《通过镜头光圈优化提高成像系统性能》(文章链接:https://www.lumenera.com/blog/improving-imaging-system-performance-with-lens-aperture-optimization)。
彗 差 彗差会导致应聚焦为图像中一个点的光变成光锥。由于出现了彗差,从镜头不同部位进入的光线在沿传感器所在图像平面聚焦的位置会越来越远。 以一定角度进入镜头的光线会导致光线在图像平面上形成不断扩大的弥散圆轨迹。如图2所示,这可能会导致扩大的光线轨迹影响任何试图成像的点光源。在图2顶部,彗差图像可以看作是向下扩大的弥散圆的点光源,形成一个锥形图像。这通常是光学元件未对准的结果。
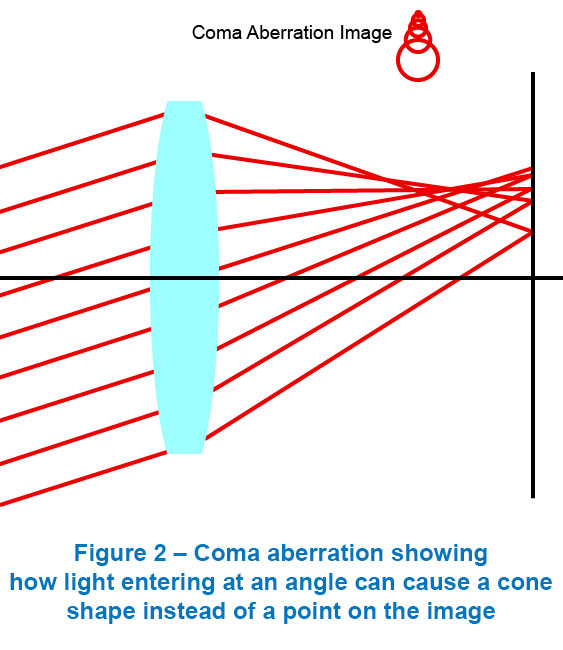
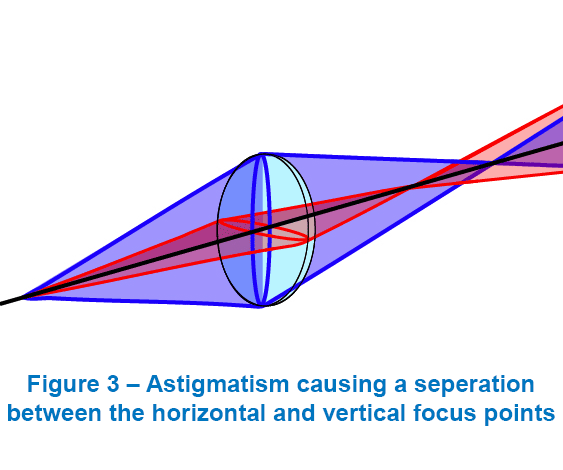
彗差发生在点光源中,例如恒星,因此彗差是天文摄影中特别重要的像差。减小光圈可以消除一些会引起这种效果的光线,但是对于天文摄影来说,减小光圈会消除很多成像必需的主题元素。在这种情况下,需要有专门的彗差校正设计镜头。散 光 在两个垂直平面上传播的光线聚焦于不同点时会产生散光。从图3中可以看到,其中两个焦点分别用红色水平面和蓝色垂直面表示。图像中的最佳清晰度点将位于这两个点之间,其中一个平面的弥散圆宽度并不大。当光学元件未对准时,散光会导致图像的侧面和边缘出现失真。散光通常被描述为查看图像中的线条时缺乏清晰度。彗差和散光通常是镜头系统内部光学元件发生类似未对准的结果。散光加剧时,肯定也会发生彗差。
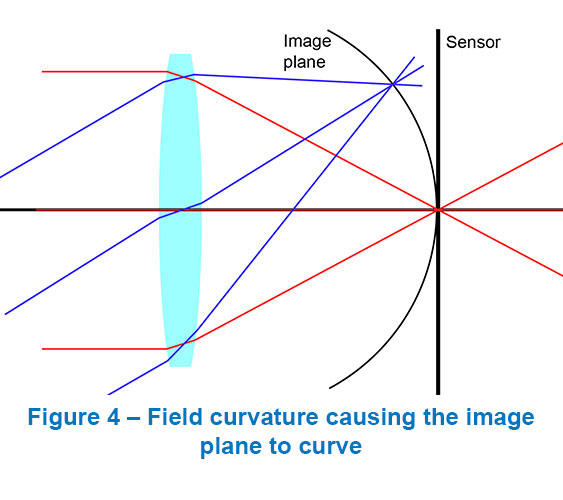
这种形式的像差可以使用大多数优质光学元件中的适当镜头设计来进行校正。用于固定散光的光学元件最初由卡尔蔡司操刀设计,并且已经有了一百多年的发展历史。如今通常只有劣质镜头才会出现这种情况,或者在镜头掉落导致内部光学元件发生损坏或位移的情况下才会发生。(珀兹伐)场曲 许多镜头都有圆形焦点场。这可能会导致图像出现软角,并主要使图像中心处于聚焦位置。然而,大多数镜头都有些圆形的焦点,如果不进行裁剪,就无法聚焦整个图像。因为大多数镜头光学元件都有曲面。场曲是多个焦点导致图像平面不平产生的结果。图4显示图像平面为曲面,因为每个焦点都位于垂直于光轴的不同平面上。用一条线连接这些点时,会显示出一个曲面。光线离开光轴进入镜头后,焦点并没有聚焦在传感器上。
相机镜头已在很大程度上对此进行了校正,但许多镜头可能会存在一些场曲。有些传感器制造商实际上正在开发可校正弯曲焦点的弯曲传感器。这种设计将允许传感器校正像差,无需采用具备高精度的、费用高昂的镜头设计。采用这种类型的传感器,可以使用价格更实惠的镜头来产生高质量的结果。开普勒空间天文台实际就采用了这种传感器,其中弯曲传感器阵列用于校正望远镜的大型球面光学元件。 如需了解开普勒望远镜的更多信息,请访问https://www.nasa.gov/mission_pages/kepler/main/index.html。失 真 失真是指图像向图像帧的边缘和侧面扭曲。焦距极长或极短的镜头的失真效果可能最为突出。两种最常见的失真形式是桶形失真和枕形失真。
桶形失真
桶形失真(又称桶形畸变)的图像边缘和侧面远离中心弯曲。这在视觉上看起来像是图像中心外凸,因为它捕获到了弯曲视野(FoV)的外观。例如,当在高层建筑的高处使用较短焦距的镜头(又称“广角镜头”)时,可以捕获更宽的FoV。当使用产生极度扭曲和宽FoV的鱼眼镜头时,FoV会实现最夸张的效果,如图5所示。在这张图像中,网格线用于帮助说明失真效果如何使图像向靠近侧面和边缘的地方拉伸。
进入镜头的光线偏离光轴并导致桶形失真。使用广角镜头可形成更大的成像区域,FoV会更宽,这种情况所带来的优点可能比图像各端出现的像差更重要。应该注意的是,有直线镜头可以补偿桶形失真并拉直FoV。这对于使用短焦距进行图像分析很重要。 对于需要宽FoV以更好捕获景观的航空成像,使用极短焦距的替代方法是使用多台并排相机。由于大范围成像最重要的因素是传感器的像素宽度,而非相机的全分辨率,同时使用多台相机捕获图像可能会实现很好的效果。Teledyne Lumenera白皮书《在航空成像中使用单台相机还是多台相机》(下载链接:https://www.lumenera.com/media/wysiwyg/documents/casestudies/Using_Single_vs_Multi_Cameras_in_Aerial_Imaging-White_Paper.pdf)中对此进行了进一步探索。 然而,在某些高度可以采用多台相机并排方式,但在大多数情况下,在某个高度,相机将需要更长的焦距才能实现对更远目标的清晰成像。因此,广角镜头可以为航空成像或精准农业等其他应用拍摄更多细节,但需要考虑高度要求。关键因素是视觉系统所需的地面采样距离(GSD)。在相机固定且相机高度保持不变的环境中(例如温室),使用广角镜头有助于对大部分目标环境进行成像。如需了解更多关于GSD以及如何建立航空成像系统的信息,请阅读Teledyne Lumenera的博文《航空成像的挑战:实现清晰、锐利的成像》(文章链接:https://www.lumenera.com/blog/the-challenge-of-aerial-imaging-achieving-a-clear-and-sharp-image)。
枕形失真
当光线通过枕形失真(又称枕形畸变)向光轴弯曲时,图像似乎向中间“收缩”。因此,图像的边缘和侧面看起来会向图像中心弯曲,如图6所示,其中网格线越往中心弯曲,延伸越远。 这种形式的像差最常见于焦距较长的远摄镜头。远摄镜头将放大图像中的目标,焦距越长,最终图像裁剪和缩放程度就越高。与其他像差一样,该因素主要影响图像的边缘和侧面。因此,保持图像清晰的最简单方法是采用较小的镜头光圈。在图6中,图像的中心保持原样,未发生失真,因此使用较小的光圈,最终可以阻挡从边缘处进入的失真光线。
复杂失真
复杂失真(又称胡子畸变)是融合上述桶形失真和枕形失真而成的复杂畸变。胡子畸变会导致图像内部向外弯曲,图像外部向内弯曲。这是一种很罕见的畸变,其中影响图像成像质量的畸变不止一种。胡子畸变通常表明镜头设计非常差,因为这种畸变产生的原因在于光学错误导致像差融合。散 焦 几乎所有用过相机的人都熟悉散焦像差。当图像只发生失焦时,就会出现散焦像差。图像清晰度和对比度降低会导致细节随着镜头逐步换景而变得更加模糊。 通常原因在于图像中没有目标位于目标发射或反射的光聚到传感器的位置。这意味着光线将在距离传感器很远不同图像平面上聚焦,从而导致图像完全模糊。如图7所示,所有光线都将形成很大的弥散圆,导致图像完全失焦。
如需解决散焦问题,只需调整镜头的焦距或相机的位置,直到目标清晰聚焦。但是,在某些条件下,相机无法聚焦于特定目标。通常原因在于距离,主体离镜头太近或太远。在无法聚焦的情况下,可能需要使用不同的相机镜头来改变焦距和最小焦距。或者缩小光圈也可以让镜头聚焦在更远的其他目标上,有效增加景深,即保持对焦的最近和最远目标之间的距离。 如需了解视觉系统所需焦距类型,请阅读Teledyne Lumenera的白皮书《正确使用镜头:选择视觉系统镜头》(下载链接:https://www.lumenera.com/media/wysiwyg/documents/casestudies/Selecting_a_Lens_for_a_Vision_System-White_Paper.pdf)。色 差
纵向/轴向像差(也称纵向/轴向色差)
光的颜色代表一种特定波长的光。彩色图像将有多个波长进入镜头并由于折射而聚焦在不同的点。纵向或轴向色差产生的原因是不同波长光线沿光轴在不同点聚焦。波长越短,其焦点就越靠近镜头,而波长越长,则会发生相反情况,即焦点离镜头越远,如图8所示。采用更小的光圈,进入镜头的光线可能仍会聚焦在不同的点,但“弥散圆”的宽度(直径)会大幅减小,避免图像模糊严重。
横向/侧向像差(又称横向/侧向色差)
导致不同波长沿图像平面分布的离轴光为横向或侧向色差。这种像差会导致图像主体边缘形成彩色边纹。校正难度比纵向色差更高。
可以使用产生不同折射率的消色差双合透镜来解决这个问题。将可见光谱的两端聚焦在同一个焦点上,可以去除彩色边纹。对于横向和纵向色差,减小光圈大小也有助于解决这一问题。此外,建议最好不要在高对比度环境(即背景非常亮的图像)中对目标进行成像。显微镜中可以使用复消色差(APO)的镜头来代替消色差镜头,消色差镜头利用三个透镜元件来校正入射光的所有波长。当颜色成为关键要素时,确保减少色差将会产生最佳效果。
底 线
随着传感器像素越来越高,镜头设计中的缺陷会随着更严重的像差变得更加明显。有几种类型的像差,这些像差的共同点是会模糊边缘附近的图像。 改善图像聚焦以使更多FoV处于聚焦点的最简单方法是采用较小的镜头光圈。在发生轻微像差的情况下,这一方案一般为首选解决方案。该方案将提供更长的景深,但同时也会降低图像的亮度。因此,只有在照明充足时,该解决方案才可行。 但镜头系统内的光学元件可能会出现偏差。在像差非常强的情况下,仔细查看相机镜头的内部光学元件可能是唯一的解决方案。为避免出现这种情况,镜头应始终轻拿轻放,并进行固定,以避免遭受过度冲击或振动。有些像差问题可以通过调整镜头的内部光学元件来修复,但需要大量的精密工作,并且只建议由训练有素的专业人员进行精密修复。 需要注意的是,另一种常见的像差是球面像差(球差)。由于球面透镜元件的形状为曲面,光线越靠近曲面边缘,就会以更陡峭的角度弯曲,导致光线沿着光轴聚焦在不同的点上。
审核编辑 :李倩
-
GLAD应用:大气像差与自适应光学2025-03-10 586
-
光学成像系统中的像差2026-04-23 177
-
[VirtualLab] 光纤光源聚焦模式的像差效应2026-05-08 162
-
#硬声创作季 #光学 光学系统设计与工艺-01.07几何像差-像差曲线水管工 2022-09-25
-
[VirtualLab] 不同像差的焦点2020-04-03 1870
-
光学理论分析2009-06-14 1226
-
单色像差有哪些分类2010-08-16 10366
-
像差理论2016-05-09 573
-
光线传播的基本定律及几何光学和光学设计等知识详述2017-11-17 1307
-
关于ZEMAX像差深入以及像差各种图表分析和介绍2019-08-25 28830
-
光学系统设计流程2023-06-13 2172
-
光学系统设计的不可忽略的参数介绍2023-06-19 806
-
同轴折反式变形光学系统设计方法 变形光学系统的结构及像差特性2023-07-31 2254
-
矢量自适应光学技术解析2023-11-29 1603
-
光学像差特性深度解析2025-12-05 1152
全部0条评论

快来发表一下你的评论吧 !
