

基于深度学习的两相流气泡末速度预测
描述
摘要:针对在气液两相流中难以进行稳态分析,无法对气泡末速度进行精准预测的问题,提出一种基于深度学习的气泡末速度预测方法。首先,搭建了一套高速相机采集系统获取气泡图像,利用图像处理技术和椭圆拟合算法对气泡进行图像分割,进而计算气泡上升速度,建立关于气泡末速度的图像数据集;然后,设计了一种以 VGG 网络为基础的回归网络模型,并采用迁移学习的方式对 VGG 网络进行训练和参数优化,有效地解决了训练样本不足、预测精度低的问题,实现了对气液两相流中气泡末速度的精准预测。实验结果表明:与传统的定量分析方法相比,基于迁移学习的 VGG 回归网络能够更好地对气泡图像进行特征提取,得到更为精准的气泡末速度预测模型,同时在小样本数据集中具备较好的泛化能力。
0 引 言
气液两相流在生物医学、石油开采、化工生产等领域普遍存在[1]。泡状流是气液两相流中最基本的流动形态,研究气泡上升过程中特征参数对掌握泡状流的运动规律尤其重要,而气泡末速度是其中的关键特征参数之一。国内外学者对气泡末速度计算方法进行了大量研究,在早期时候,文献[2]证明了气泡末速度与气泡纵横比和当量直径有着很大的联系,并得到了气泡末速度的经验关系。文献[3]提出了一种液体池气泡在上升过程中的参数化方法。文献[4]对剪切流中的气泡横向运动进行了研究。国内的一些学者也针对不同工况下的气泡末速度进行了实验研究和模型计算[5⁃7],但这些方法大都根据经验公式以及气泡上升过程中的受力分析得到气泡末速度的模型。然而,由于两相流中的流场变化是不固定的,很难得到一个稳定的状态对其进行定量分析。另外,这些方法不能很好地提取气泡的形状信息,容易丢失其形状特征参数,无法得到一个精确的气泡末速度模型。
为了解决上述问题,本文将深度学习[8]的方法用到气泡末速度的预测当中。随着神经网络的不断发展,诞生了一些优秀的网络模型,如 VGG Net[9]、Res Net[10]、Dense Net[11]等,其应用领域也在不断增加[12]。而迁移学习[13]的加入可以有效地解决数据集较少带来的模型难以训练的问题[14]。本文将深度学习和图像处理方法相结合,利用迁移学习的方式对深度学习模型进行训练,从而得到一种高精度的气泡末速度预测模型。
1 实验系统设计和图像处理方法
1.1 高速相机采集系统
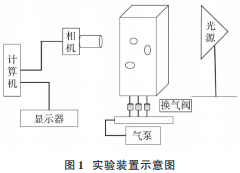
实验装置如图 1 所示,实验设备由高速相机、光源、气泵、水箱、进气阀、计算机等组成。其中,高速相机的拍摄频率为 500 f/s,实验采用 LED 背光照射法,水箱规格为 160 mm ×160 mm ×500 mm,液面高度为 300 mm。水箱底部连接多个气孔,气孔直径为 0.8~1.2 mm,用于产生不同大小的气泡。气孔与单向气阀相连,气阀的另一端接气泵,通过调节气阀开度调节进气量的大小。本文实验的拍摄高度在距离水箱底部的 260 mm 处,此时的气泡速度已经基本趋于稳定[15]。
1.2 图像预处理
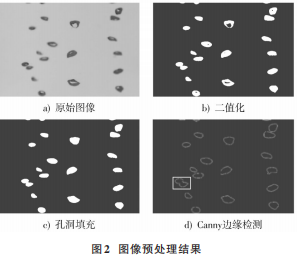
由于气泡的形状并不规则,气泡中心或边缘由于反光会出现残缺以及气泡重叠现象,导致无法准确获取气泡的轮廓信息。因此,采用二值化、形态学算法对图像进行预处理,然后利用 Canny 边缘检测算法得到气泡的轮廓信息,原图与处理结果如图 2所示。
1.3 基于最小二乘法的气泡轮廓拟合
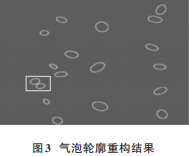
由于气泡在上升的过程中往往会出现重叠的现象,在进行空洞填充和边缘检测时会导致两个气泡合并为一,导致无法计算单个气泡的特征参数。本文利用基于最小二乘法的椭圆拟合算法对气泡的轮廓进行分割与重构。其原理如下:
令椭圆的一般方程为:

根据式(1)可以唯一确定二维平面内的任意椭圆,利用约束条件 A+B=1使方程避免无解,通过将边缘检测中的离散点(xi,yi)代入上述方程,求解式(1)中的各系数。在实际求解过程中,利用最小二乘法求式(2)所示的目标函数的最小值,来求解方程的系数。

根据极值原理,当目标函数有最小值时,必有:

求解此线性方程组,即可得到椭圆方程。
气泡轮廓重构结果如图 3所示。
2 基于迁移学习的卷积神经网络模型的建立
随着深度学习的不断发展,先后出现了很多优秀的网络模型,但是有监督学习的网络模型的训练往往需要大量的数据集,而有些特定的场景往往无法得到较多的数据集,因此迁移学习便受到了越来越多的关注。迁移学习就是利用在大型数据集上已经训练好的数据模型,然后结合本身的小样本数据集进行优化,从而弥补数据不足的问题。本文分别采用了VGG16和VGG19在ImageNet数据集上的预训练模型,然后在其基础上利用实验获取的气泡数据集对网络的全连接层进行训练,通过对网络中参数的调整,最终得到气泡末速度网络预测模型。
2.1 网络的构建
牛津大学的视觉几何组在 2014年提出了 VGG 网络结构,该网络最大创新是使用连续的小卷积核代替大卷积核,并由此增加了网络的深度,而且使得网络参数更少,是一种十分经典的网络结构。为了适应本实验的研究目标,在其网络基础上对最后的全连接层进行了修改,分别得到了B⁃VGG16和B⁃VGG19两种网络模型,如图4所示。
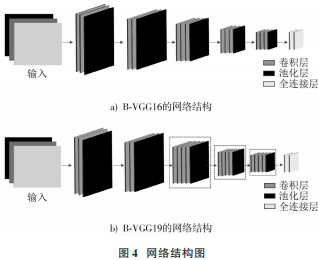
本文的两种网络结构分别有 15层和 18层。以基于B⁃VGG16 的网络为例,其网络由 13 个卷积层和 2 个全连接层组成。其中 13 个卷积层分成 5 个模块,前 2 个模块分别由两个 3×3 的卷积层和一个最大值池化层组成,后 3 个模块在前 2 个的基础上各自增加了一个 1×1 的卷 积 层 ,最 后 利 用 2 个 全 连 接 层 计 算 网 络 的 输 出。B⁃VGG19 的网络结构和前者类似,只是在最后的 3 个模块上各自增加一个 3×3 的卷积层,使得网络的深度进一步加深。
2.2 数据集的建立
在进行气泡的末速度计算时,首先利用重构后的气泡质心计算位移,然后通过像素标定计算气泡的实际末速度。在进行标定时,将标定尺伸进所测的流体中,等流场静止后,调整相机位置和焦距,使得标定尺在相机中得到清晰的图像,本实验中得到的标定比例为 10.74 pixel/mm。
气泡末速度 Vt的计算公式如下:

式中:k为标定比例;Δx为气泡的位移;Δt为图像时间间隔。
在进行气泡图像裁剪时,选用大小为 96×96 的像素。最后通过实验数据采集得到 200张数据,其中 50张作为测试集,经过数据增强得到 600 张图像作为训练集。得到的数据集样本如图 5所示。
3 实验结果与分析
实验中网络的训练是在 GPU 存储器容量为 16 GB的戴尔工作站 Vostro 中的 Windows 10 系统中运行的。在训练过程中超参数配置为:epoch 设为 50,batch⁃size设为 8,初始化学习率为 0.001。
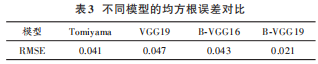
损失函数分别使用 MSE、MAE 和 Huber 的训练结果,如表 1 和表 2 所示。根据均方根误差统计结果可以看出,采用 MSE 作为损失函数的训练效果最好。同时可以看出,B ⁃VGG19 的训练结果明显优于 B ⁃VGG16。可见,适当的增加网络深度能够更好地提取图片的特征,进而得到更好的预测模型。
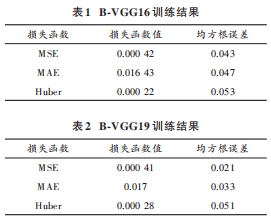
不同模型的测试结果如图 6 所示,B⁃VGG19 模型的预测结果与实际值更为接近。各个模型的预测精度采用均方根误差(RMSE)进行评价,结果如表 3所示。
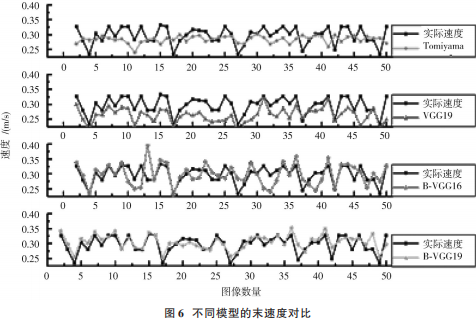
基于深度学习的网络模型能够预测出两相流中气泡的末速度,而且其预测精度相较于 Tomiyama 经验公式有明显的提升。从基于 VGG19 的两种网络预测结果可以看出,采用迁移学习训练的网络模型相较于直接基于小样本数据集训练得到的模型更为精确。
4 结 论
本文提出了一种基于深度学习的气泡末速度预测模型。针对气泡图像数据集的建立,设计了一套基于高速相机的气泡图像采集系统,并结合图像处理的方法对采集的图片进行预处理操作,利用椭圆拟合算法对重叠气泡的轮廓进行分割与重构,计算了气泡的特征参数与速度信息。最后采用基于迁移学习的深度学习模型对气泡图像数据集进行训练和测试。相比传统的分析方法,本文所提方法克服了其难以进行稳态分析和气泡形态信息丢失的问题,提高了对气泡末速度预测的精度。
审核编辑:汤梓红
-
什么是两相电和三相电?三相电和两相电有什么区别?2023-12-25 11567
-
两相电机反转怎么办 两相电机反转怎么调正传2023-04-24 36292
-
两相电动机分析2023-03-29 1290
-
两相步进电机和配套的两相步进电机驱动器比较2023-03-13 1387
-
三相电机怎么装成两相电机 如何测量三相电机的好坏2023-03-06 6029
-
两相单极步进电机的驱动电路2023-02-24 5107
-
两相步进电机的工作原理2021-07-20 12510
-
深度学习在预测和健康管理中的应用2021-07-12 1985
-
三相电和两相电的区别_三相电和两相电的优势2017-12-05 128887
-
两相电与三相电的区别及分析2017-09-11 6520
-
两相SVPWM原理及经典两相SVPWM算法2016-03-30 1120
-
两相钟脉冲发生器2009-03-23 1040
全部0条评论

快来发表一下你的评论吧 !
