

新型阵列式微惯性测量系统实现准确位置和姿态数据采集
描述
惯性导航是目前国内紧缺的高新技术,市场需求多、发展潜力大。MEMS惯性传感器虽然具有微型化、成本低等优点,然而,单一的消费级MEMS惯性传感器存在测量误差大、稳定性差等缺陷,这会导致MEMS惯性导航系统获取的姿态、运动数据精度差,无法满足高新产业的发展需求。因此研究价格低、精度高、稳定性好的微惯性测量系统是十分有必要的。
据麦姆斯咨询报道,针对消费级MEMS惯性传感器测量误差不佳、稳定性不好,无法服务于高精度的应用,以及工业级MEMS惯性传感器价格昂贵等缺陷,苏州大学的研究团队通过研究阵列式MEMS微惯性测量单元(IMU)技术方案,设计了一款新型阵列式微惯性测量系统,精度相较于单个惯性传感器提升至少5.7倍,实现准确位置和姿态数据的采集,具有精度高、体积小、应用广泛的特点。相关研究成果已发表于《电子电路设计与方案》期刊。
该阵列式MEMS-IMU系统的硬件结构主要包括MEMS传感器阵列模块、微处理器模块、并行数据总线,传感器阵列模块由32个消费级微惯性传感器CM20948构成,负责感知环境,采集当前的加速度、角速度数据。软件系统中设计了数据采集、分析、标定算法,通过并行数据总线实现多个传感器的同步数据获取,并且对多个传感器进行多数据融合处理,使得该设计系统采集到的数据延迟很小。系统体积小巧,整个电路板的尺寸仅为40mm × 61mm × 9mm,具有很高的便携性和性价比。
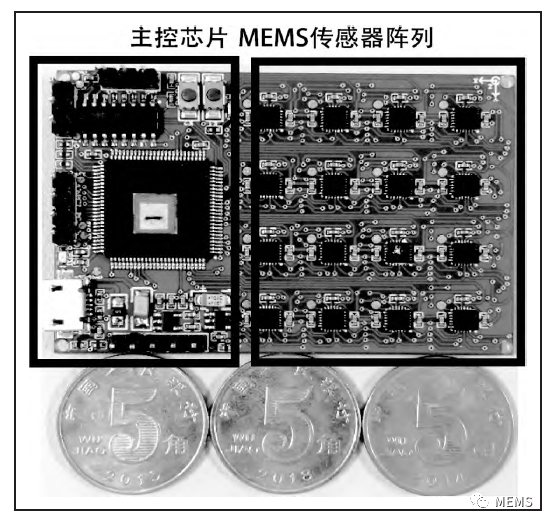
图1 阵列传感器硬件实物
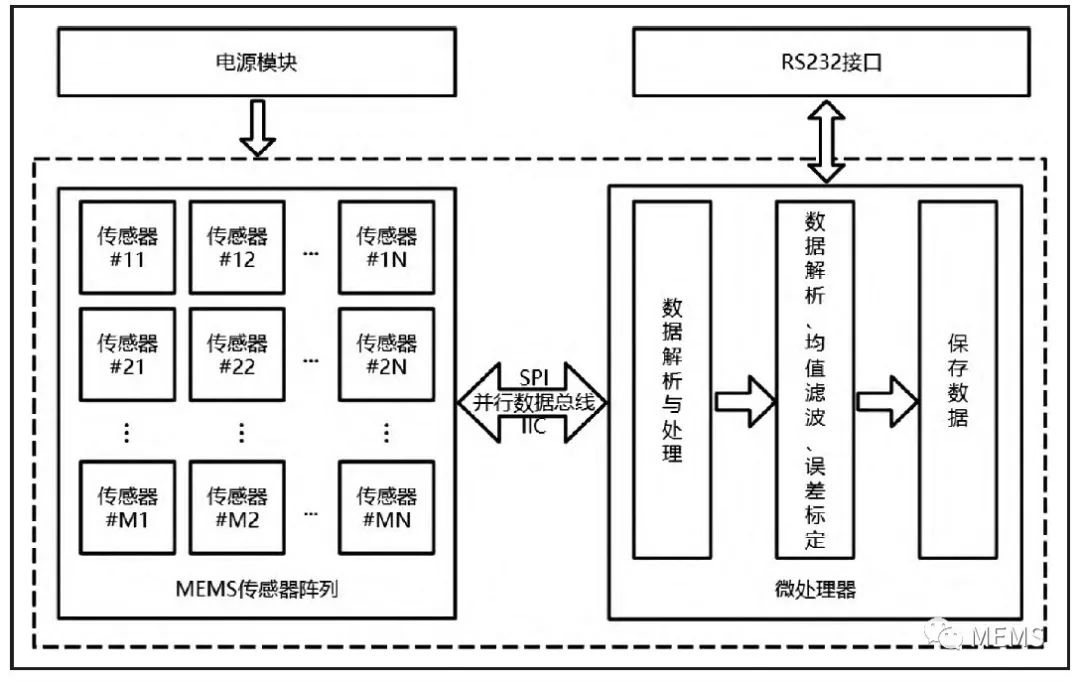
图2 系统硬件结构图
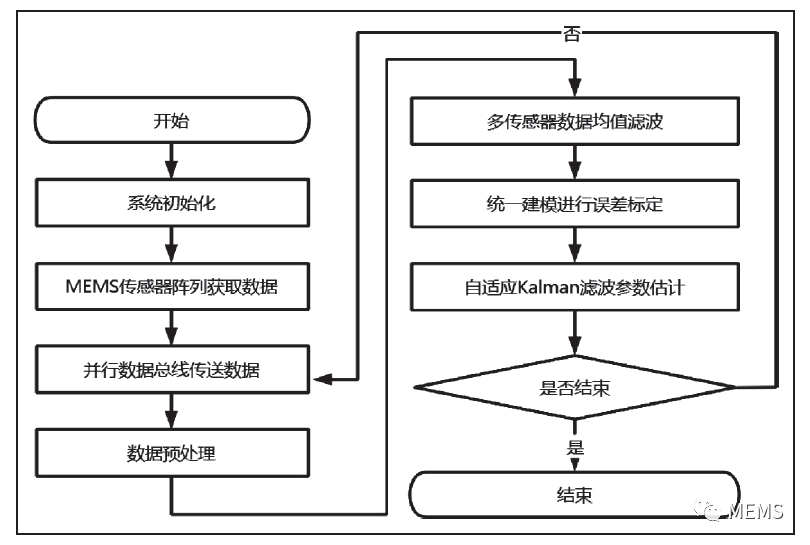
图3 程序运行示意图
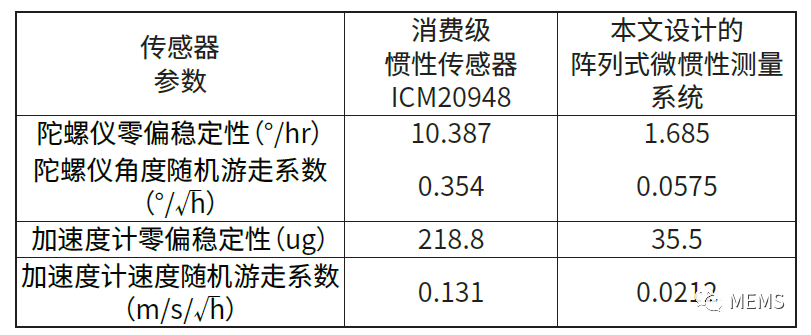
Allan方差是量化噪声的一种常用方法,适用于鉴别测量数据中不同类型的噪声,可以用来评估传感器参数稳定性,Allan方差的值越小,传感器精度越好。测试结果表明,该阵列式MEMS-IMU系统的Allan方差显著好于单个消费级惯性传感器。相较于单个惯性传感器,测量精度提升了约5.7倍,能够实现准确位置和姿态数据的采集。
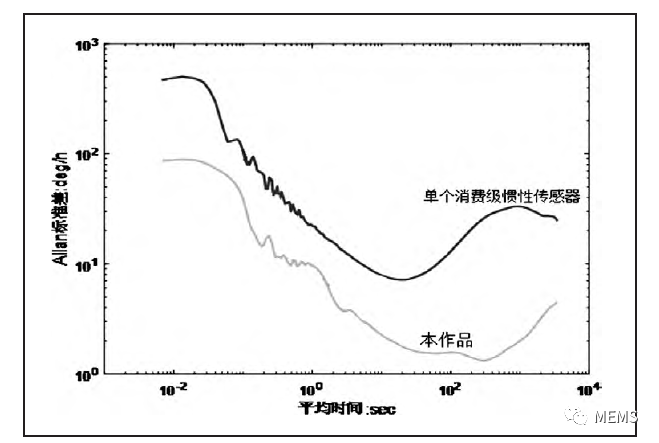
图4 阵列式MEMS-IMU系统与单个惯性传感器Allan方差性能对比
表1 阵列式微惯性测量系统性能参数
该新型阵列式MEMS-IMU系统能够稳定、准确地测量出载体的加速度、角速度,实现实时监测载体运动情况,具备高精度、小体积的特点,具有一定的实用价值。
审核编辑:郭婷
-
惯性式传感器动作捕捉系统原理2023-06-26 5376
-
航向姿态参考系统与惯性测量单元的联系与区别2021-12-17 2520
-
请问精确的数据采集如何准确实现?2021-05-08 1788
-
如何使用FPGA实现新型高速CCD图像数据采集系统2021-02-02 1419
-
基于MEMS和单片机实现惯性测量组件的数据采集系统的设计2020-07-31 1506
-
使用数据采集系统进行温度测量2019-09-06 1831
-
基于STM32的新型电力数据采集系统的设计与实现2017-12-28 11499
-
阵列式弹道测量系统2016-12-17 665
-
基于FPGA的新型高速CCD图像数据采集系统2016-09-22 750
-
什么是数据采集?2016-01-28 4846
-
基于FPGA和AD9240的非制冷焦平面阵列数据采集电路实现2015-03-16 5700
-
数据采集测量2011-12-28 3576
-
一种新型数据采集与监控系统的实现2011-09-27 2689
-
网络测量中数据采集系统的设计与实现2009-09-21 840
全部0条评论

快来发表一下你的评论吧 !
