

挑选激光雷达的小技巧分享
MEMS/传感技术
描述
激光雷达作为智能汽车上的“新物种”,各种新出现的关键词让人眼花缭乱:FOV、反射率、ROI......
在行业尚未形成统一标准的今天,如何才能判断出什么样的激光雷达才是真正的优秀呢?
今天,我们就给大家分享一些挑选激光雷达的小技巧。
能否看得远?
很好理解,激光雷达看得越远,就能给智能辅助驾驶系统预留越充足的反应时间来做决策。
我们通常说的激光雷达「探测距离」指的是其「测远能力」,并非「最大量程」,这两个概念是有所区别的。
「最大量程」是在不加任何限定条件下的最远探测距离,而「测远能力」是在一系列标准工况下的最远探测距离,其重要标准之一就是 10% 反射率目标物。
这里有个新的知识点:反射率,指物体对于光线的反射程度。
在同样材质下,白色比黑色的反射率更高,光滑物体比粗糙物体反射率更高,反射率越高的物体越容易被感知。
比如,黑色轮胎就是典型的 10% 反射率目标物。
禾赛 AT128 的测远为 200 米@10% 反射率
一般情况下,同一台激光雷达的「最大量程」是大于「测远能力」的,比如某宣传最远探测距离可达 400 米的激光雷达,在限定 10% 反射率的情况下,其测远能力可能只有 200 米。
对于辅助驾驶来说,「测远能力」是相对来说更有意义的指标。通俗来讲,就是光看得远没有用,还得能有效识别,也就引出了下一条,是否看得清。
是否看得清?
一台优秀的激光雷达光看得远是不够的,还得看得清,也就是有足够高的分辨率。
比如下面这张图,只有几个点,你无法识别出目标物到底是什么;只有分辨率足够高,才能被系统有效识别。
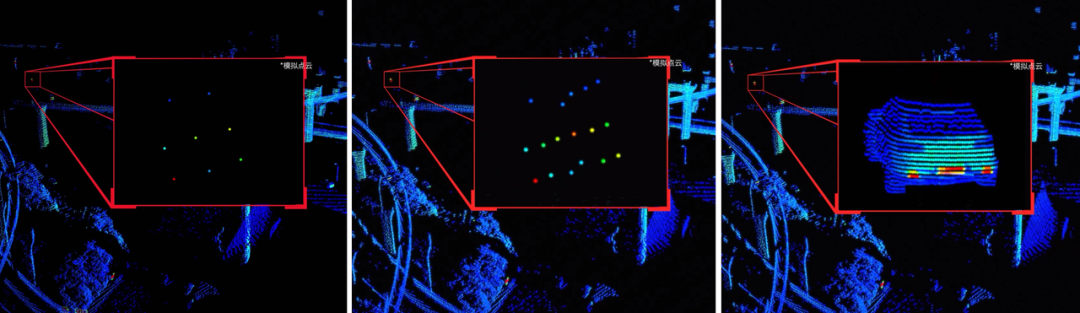
模拟点云示意图
那么代表激光雷达“分辨率”的核心指标是什么呢?
对于摄像头来说,「像素」是代表其分辨率的核心指标,像素「点」越密,分辨率越高。
而同样作为感知传感器的激光雷达可以看作一个三维的摄像头,其三维像素「点」越密,分辨率就越高。这个三维像素点就是激光雷达每秒产生的点云数量,也就是点频。

153 万点/ 100 万点/ 75 万点每秒激光雷达的分辨率示意图
点频越高,分辨率就越高,激光雷达视野里的世界就越清晰,对于辅助驾驶系统来说就越安全。
稳定可靠吗?
作为智能汽车的“眼睛”,稳定可靠是激光雷达发挥一切安全作用的前提。
首先,一台合格的车规级激光雷达需要经过数十项严苛的可靠性测试:包括耐受恶劣天气的高低温测试、耐受长期振动的温循振动测试、耐受瞬时冲击的机械冲击测试;
还有紫外老化、防尘、防水、盐雾、冰水冲击等各类环境的测试,以保证激光雷达在严苛的条件下也能正常工作。
因此,买带激光雷达车的朋友们完全不用担心洗车、高温、行驶中颠簸等会损坏激光雷达,车规级的激光雷达还是很结实的。
另一方面,激光雷达系统设计是否足够“鲁棒”也会影响它的寿命。比如它的扫描方式、机械运动的频率、激光器的数量,都会影响其可靠性。
现在,你是否对如何选择激光雷达有了更多的了解呢?下一期,让我们聊一聊:激光雷达的线数越多越好吗?
当然如果你有感兴趣的话题,也欢迎留言告诉我们。
编辑:黄飞
- 相关推荐
- 热点推荐
- 激光雷达
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 30466
-
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享2021-07-22 10099
-
谈一谈自动驾驶的激光雷达2021-06-17 13450
-
苹果正挑选激光雷达供应商,寻找“尖端”传感器2021-02-22 2982
-
激光雷达2021-01-17 20189
-
最佳防护——激光雷达与安防监控解决方案2020-02-29 5743
-
TOF激光雷达2019-06-07 9275
-
机器人和激光雷达都不可或缺2019-02-15 6221
-
北醒固态设计激光雷达2018-01-25 5865
-
消费级激光雷达的起航2017-12-07 7485
-
激光雷达面临的机遇与挑战2017-09-26 6724
-
常见激光雷达种类2017-09-25 13999
-
激光雷达分类以及应用2017-09-19 8898
-
空间激光雷达最小接收光功率的计算2009-05-15 4640
全部0条评论

快来发表一下你的评论吧 !
