

立体摄像深度感知的FPGA实现
FPGA/ASIC技术
描述
针对立体摄像的深度感知,FPGA解决方案能使处理器的时间得到缓解,减少或除去器件的成本,例如MPU、DSP、激光器和昂贵的镜头。通过提供给机器人其环境中的差异测绘,FPGA使机器人中的CPU专注于重要的高层任务,例如建图和定位。
差异测绘
加深度感知到机器人的常用技术是用两个水平放置的独立摄像机,互相之间平行分开放置。用差异测绘算法对两个摄像机进行比较,见图1。
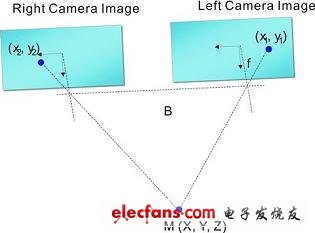
图1 差异测绘计算
简单来说,差异是指右面和左面图像之间的差别。物体越接近摄像机,两个图像之间的差异越大。
你可以自己来做一个实验,对着你的脸水平地向上握住一支笔,不停地眨你的左眼和右眼。移动的笔越接近你的脸,你眨眼时觉得移动越多。做更多的移动时,物体越接近你的眼睛,图像中的差异越大。
如图1所示,从两个图像之间物体的位置算出差异:d=x1-x2。为了计算点M的实际坐标,可通过左面和右面的摄像机来进行计算:
X=Bx1/d
Y=By1/d
Z=fB/d
相关的问题
计算差异测绘依赖于相关的图像,以及左面图像和右面图像的匹配性质。逐点计算相关的像素的计算量是很大的,因此用其它算法来简化这个问题。有一种方法称为图像点相关,仔细检查左面图像的像素块,称为点,然后在右面图像中寻找相同的点。其它的方法包括边沿检测和匹配。一旦定位了相应的图像,就可进行差异计算。
失真与曝光问题
如果使用高质量的摄像机,可以忽略镜头失真。为了省钱,使用便宜的CMOS 或者CCD摄像机,或者低成本广角镜头。这些较低质量的产品会引入失真或曝光问题。
镜头会引起比例和定位失真,例如白点效应,靠近图像外面的物体出现弯曲状,使用众所周知的图像处理算法可以进行补偿。针对移动或者其它几何算法,纠正白点的一种方法是使用坐标的查找表重测图像中的像素。
在非常明亮和非常暗的环境中,其它的算法需要可靠地捕获图像中的详细特征。例如,针对不同的区域确定最佳的曝光设置,使用区域的合成图像可以补偿缺少背景亮度。
用含有嵌入式DSP的FPGA的解决方案
本文中阐述的深度感知算法计算复杂,以实时的视频速率来实现。系统设计者必须评估CPU/软件、ASIC, ASSP(例如DSP处理器)和FPGA解决方案,确定哪个是最佳的,以及FPGA价格。
图2展示了提出的FPGA协处理器解决方案,解决失真、曝光、通信和针对深度感知差异测绘算法。这个方法使CPU腾出时间,允许DSP处理器处理更多的串行任务。
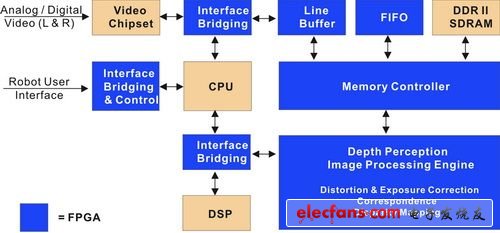
图2 FPGA支持计算量大的差异测绘算法
通常选择FPGA时,需要评估三个电路方面的需求:
●针对利用并行特性的协处理功能,DSP的功能和性能。
●DDR(双数据速率)和LVDS(低电压差分信号)支持接口至片外SDRAM缓冲存储器,直接连接到来自摄像机的图像数据。
●安全方案以保护知识产权。
对于图像处理算法,传统的DSP处理器的并行功能有限,每个DSP芯片只有1到4个乘法器,见图3中的左面。因此DSP用很高的时钟速率来进行补偿,时钟速率高达1GHz或更高,以达到高的吞吐量。需要很快完成的复杂串行任务的DSP算法应该用DSP处理器实现。
然而,许多深度感知图像处理功能需要大量的并行处理,例如线性插值技术,媒体滤波器和几何估计。与DSP芯片比较,FPGA可以用并行来执行串行功能,以加速系统性能,见图3的右面所示。例如图像对应是很简单的算法,比较大量的像素值,或者两个图像之间的像素点。为了得到有效均方差的和(SSD),图像对应算法必须对图像中的像素进行百万次计算,对串行执行功能的DSP芯片来说这是一个挑战性的任务。
具有DSP功能的FPGA包含几个乘法器块,但是一些FPGA还有嵌入式加法器、减法器和大大增加处理性能的累加器。尽管低成本FPGA以低于300MHz系统时钟频率工作,但用片内多个DSP块以并行方式实现多个DSP功能可以达到高的DSP吞吐量(3,000 MMAC)。
存储器和DDR
由于有多个乘法器,利用FPGA并行的灵活性有益于存储器的访问。能够容易地并行访问各种存储器。片内分布式存储器可以用来建立小的高性能便笺,针对去除白点使用坐标的查找表,对于在图像中再测绘像素是很有用的。片内较大的嵌入式存储器块能构建较大的高性能存储器,用于FIFO和线缓冲器。
片外存储器DDR II SDRAM可以提供大的高性能存储器。针对常用于图像处理,存储整个帧的DDR SDRAM,FPGA可以为DDR SDRAM提供存储器控制和接口。
较低的时钟速度(100MHz以下),DDR存储器控制器接口是容易做的,可用FPGA中的通用I/O和逻辑实现。然而在较高的频率,拥有专门电路的FPGA要求稳健的DDR存储器接口。不是所有FPGA器件都有这些专门电路的,实现高速DDR存储器接口的成本和复杂性差别很大,取决于特殊的FPGA。
LVDS
针对摄像机和通过LVDS接口的视频芯片集的深度感知,例如摄像机链接, FPGA接口图像处理引擎。LVDS是低噪声、低功耗,小摆幅差分信号用于通过铜线传送高速(每秒吉比特)数据。
作为一个用于视频接口的例子是7:1 LVDS接口,有多个LVDS信号对用于数据传送,一个信号对用于时钟。对一些FPGA来说,这是本身的I/O接口。视频数据通过3个LVDS对进入FPGA,I/O结构对这个包进行解串,然后把FPGA中并行的数据送到逻辑阵列。
安全性
因为自主的机器人有时用于军事应用,在配置期间FPGA不应对系统引入额外的脆弱性。对于基于SRAM的FPGA,配置数据来自外部的非易失存储器。有些FPGA拥有内置的128位AES解密引擎,防止黑客通过逆向工程来获取FPGA中的功能。
只要密钥是未知的,AES配置位流加密提供了保护措施。然而,非易失FPGA完全去除了这种安全性的风险。一些非易失FPGA在同一芯片上组合了Flash和SRAM。上电后SRAM获得工作配置。这种技术提供了高配置安全性,同时又利用了SRAM无限次重构的优点。
结语
支持DSP、差分信号LVDS和DDR II存储器接口的FPGA使得机器人的实时感知成为可能。
对于机器人的立体视觉应用,针对实时图像处理实现,CPU、DSP处理器和FPGA协处理器的组合能够对性能和价格做出最佳的平衡。FPGA能够处理高度并行差异测绘和深度感知算法。DSP进行较少并行处理、高速和简单代码的更加复杂的功能。CPU做需要灵活性和高层软件实行的那些部分。
基于Flash,非易失LatticeXP2 FPGA支持许多需求,包括LVDS、内置DDRII存储器和完整特性的DSP块,以及大量的可编程逻辑和存储器块支持接口和其它的定制功能。许多DSP知识产权核和MATLAB SIMULINK使设计更加便利。Lattice还有基于7:1 LVDS视频接口的参考设计和平台。免费参考设计IP提供的一些功能是色深度转换、亮度、对比度和视频覆盖。
-
Bumblebee X 立体相机提升工业自动化中的立体深度感知2024-11-09 1314
-
计算机视觉中的立体视觉和深度感知Python示例实现2023-11-21 1799
-
边缘AI套件上的立体视觉深度感知2023-06-12 697
-
毫米波雷达可实现智能驾驶感知系统立体化2023-06-01 2036
-
一种端到端的立体深度感知系统的设计2023-05-26 1678
-
什么是深度学习?使用FPGA进行深度学习的好处?2023-02-17 2182
-
通过深度学习提高和发展车辆感知2022-11-10 955
-
多车立体事件相机数据集:用于3D感知的事件相机数据集2022-11-07 3283
-
如何通过立体视觉构建小巧轻便的深度感知系统2022-08-23 2109
-
如何使用FPGA实现微型实时多目立体视觉机的设计2021-04-02 1207
-
采用OPT9221 ToF传感器设计的立体视觉和深度感知电路2020-11-27 2188
-
如何用FPGA实现实时深度感知?2019-10-17 2460
-
双目立体视觉摄像头模块开发设计2018-05-28 3749
-
三目立体视觉外极线校正及其FPGA实现方法2016-09-17 764
全部0条评论

快来发表一下你的评论吧 !
