

一种新型智能导盲车的研究与开发
描述
周 帅,魏佳豪,陈籽萌,邹思奇,田丰源,赵琳博,谢印庆
(大连理工大学城市学院,辽宁 大连 116600)
摘 要 :近年来,视觉障碍者的数量急剧增加,而无障碍的区域却变得越来越小。为了更好地帮助视觉障碍者像正常人一样生活出行,从硬件设备和软件系统两方面设计了新型智能导盲车装置。该导盲车由 STM32 嵌入式控制器、超声波传感器、红外传感器、音频报警模块、GPS 模块和蓝牙模块构成,多数据传感器共同集成,实现了在视觉障碍者出行时可以依靠导盲车安全地行走。
0 引 言
近年来,盲人群体庞大,很多研发团队都在致力于导盲辅助相关设备的研究。国内目前的研究方向是以导盲杖 [1-2]和导盲眼镜 [3] 为辅助工具,而国外的研究中心则是高端机器人。为此,本文研发了一辆以单片机为主硬件基础并与软件相结合的智能导盲车。该导盲车主要实现随着环境的变化提供照明、遇到障碍物时语音提醒以及避障路径检测和实时定位的功能。
1 系统结构设计与功能
智能导盲车运用STM32单片机作为主硬件基础,在此基础上添加各种模块集成,并与软件相结合,进而实现对智能导盲车性能需求的研究。系统结构如图1所示。
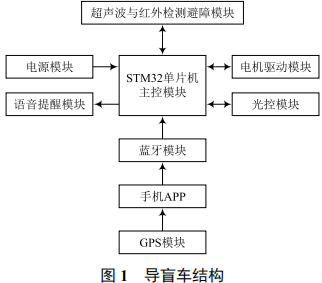
系统的超声波模块是主要的避障模块,它实现对前方障碍物的感知并测距避障。GPS 模块实现对小车的定位。电源模块为整个系统提供能量。语音提醒模块实现遇到障碍物时的报警功能。红外避障模块实时进行路径检测并实现对车身左右的障碍物进行避障。主控模块是 STM32 单片机,同时也是整个硬件系统的核心,它可以实时处理传感器传输过来的数据,并根据所指示的命令做出应答。电机驱动模块为导盲车提供机械能,使其具有机动性。光控模块对盲人出行时的环境进行判决和照明。蓝牙模块实现单片机与手机间的通信,运用手机与导盲车相连接并操纵。
2 主要硬件模块
2.1 主控模块
以STM32F103ZE单片机作为主硬件控制系统,目前市面上多应用 51 单片机和 15 单片机。从盲人行进安全系数等方面考虑,导盲车需要实现多种功能,保证数据信息采集的效率,因此对单片机的运行性能要求较高。文中选用 STM32单片机作为导盲车的主控芯片。STM32单片机资源丰富,可容纳数百千字节的程序,也可移植RTOS、GUI中间件,时钟频率快、I/O口多、库函数丰富,能够满足几乎全部的应用需求。
2.2 超声波避障模块
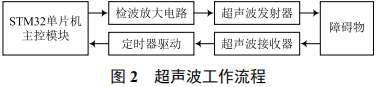
避障模块使用超声波HC-SR04传感器[4-5]。该模块的避障效果优越,使用直流5V电压,远可在2~450 cm范围内探测出与障碍物的距离,如2 cm超近盲区等。超声波避障的工作过程 :模块的发送端发出超声波时,定时器中断开启 ;当触碰到障碍物时返回到接收端,定时器中断就立即停止计时,经过接收电路放大和整形后返回到单片机主控模块。工作框图如图2 所示,测距是根据超声波在空气中的传播速度C=340 m/s,记录高电平持续的时间T,与障碍物距离S=TC/2[6]。为了实现模块的避障功能,主要是在单片机所对应软件程序里设置一个S的最大阈值,当设定的值小于阈值时,此时数据回归到单片机,使小车做出相应的判断以躲避障碍物,同时也会发出语音报警,提醒盲人当前遇到障碍物。
2.3 GPS 模块
本设计所用的GPS模块为 TTL-LEA,是一款简单方便、实用易用的嵌入式开发的GPS 模块,具有-144 dBm信号灵敏度、120 mW的极低功耗,使用方便。定位精度高达2.5 m,拥有标准SMA有源天线接口,支持NMEA-0183、UBX二进制通信协议 ;采用U-BLOX第五代GPS引擎,精度高、抗漫反射、抗干扰能力强。同时,该模块在连接 GPS模块后无须附加设备即可实现定位功能。
2.4 红外避障模块
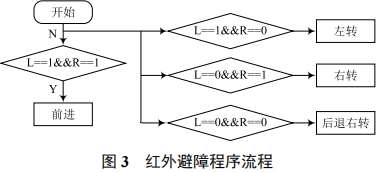
本文的红外避障模块采用HCRT5000红外传感器,该传感器对外界光线有较好的适应能力,测距速度快。具有成本低、体积小、使用方便、检测精度高等优点 [7]。将红外传感器分别放于导盲车的左右两端,用来感知左右两侧的障碍物。当左侧红外传感器感知到障碍物时,传感器的接收端将信号传输到单片机中,通过与设定的软件系统的程序相结合进行判断,从而使车右转。同理,当右侧红外传感器感知到障碍物时车会左转,两侧无障碍物时会前进,左右均有障碍物时车会后退并右转。程序设计流程如图 3 所示。
2.5 蓝牙模块
本设计使用HC-05蓝牙模块,采用非常快速的连接方式,就可以进行短距离数据间的传输。当前市面上也有通过WiFi模块与硬件设备相连接的情况。但考虑到蓝牙不需要依靠网络,且HC-05蓝牙模块具有功耗小、价格低廉、响应快、稳定性好、使用简单等优点,仅占用单片机的一个串口,再通过蓝牙通信技术,就可以实现硬件设备与手机相连接 [8-9]。
2.6 电机驱动模块
在导盲车的两端各安装一个步进电机充当车轮,并通过单片机调节 PWM 的占空比和脉冲信号的频率,控制两个车轮的速度,速度不同时导盲车进行左右转弯,速度相同时导盲车直行。本文使用ULN2003驱动芯片对步进电机进行驱动。与直流电机不同的是它通过输入电脉冲信号,将脉冲信号变为转换角位移的机理,进而使小车移动。当前市面上广泛应用直流电机和步进电机。相比较而言,步进电机结构简单、控制性能和机动性能优越,盲人通过操纵手机 APP 可以使小车快速启动和停止 [10],并且具有误差不长期积累等优点。综上,考虑到总体的设计需求,导盲小车选择使用步进电机。
3 软件设计与调试
以上主要介绍了整个系统的硬件板块,而一个完整的系统还需要软件的支持。为此,需要将硬件模块所支持的软件程序烧录到单片机上,将各传感器收集到的数据通过杜邦线传递,与主控模块相连接,主控模块依据预设的软件程序进行判断和处理,最终整个系统的构架搭建完成,使盲人能够真正利用导盲车进行导盲。
4 结 语
为解决当前盲人出行问题,本文提出了一个以STM32单片机为控制核心的智能导盲车系统。系统中设计了驱动芯片、步进电机、超声波和红外避障传感器、GPS等模块。经过实验测试发现,导盲车实际使用效果较为理想,解决了盲人出行困难的问题。
审核编辑:汤梓红
-
怎样去设计一种基于单片机STM32F103的智能拐杖导盲系统?2021-07-14 1394
-
研究人员开发了一种新型的磁力驱动高速软件机器人2020-10-10 3687
-
如何使用机器视觉实现智能导盲眼镜的设计2020-08-12 1448
-
以色列研究人员开发出了一种能够识别不同刺激的新型传感系统2019-05-21 1353
-
一种光电智能车寻迹算法的研究2016-11-11 1491
-
一种新型多电平SVPWM控制策略的研究2016-03-30 529
-
一种新型智能机器人触觉传感服装的研究2015-12-25 658
-
一种新型多协作中继选择协议研究2012-08-06 1694
-
一种新型过流保护电路的设计研究2009-12-02 26059
-
一种高效的代理多重盲签名方案2009-04-18 1125
全部0条评论

快来发表一下你的评论吧 !
