

库卡机器人EL6752 DeviceNet板卡配置福尼斯(Fronius)焊机的方法教程
机器人
554人已加入
描述
1. 已经配置 EL6752 模块
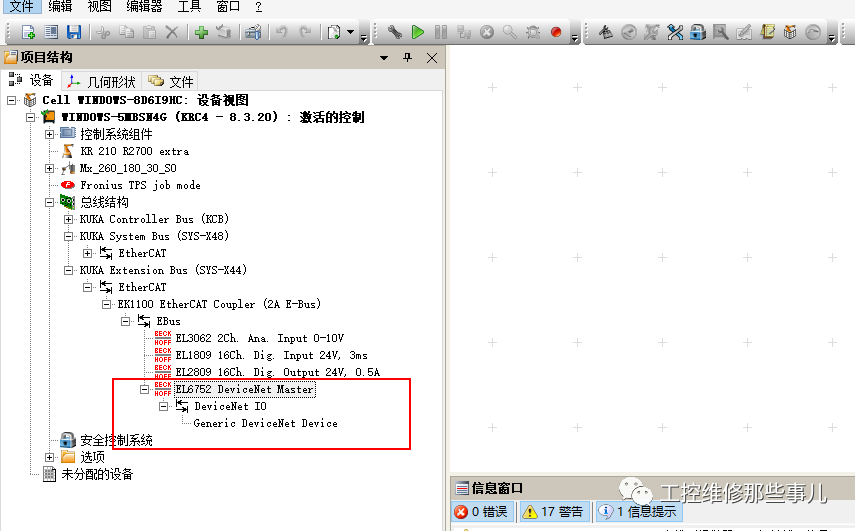
2. 展开“总线结构
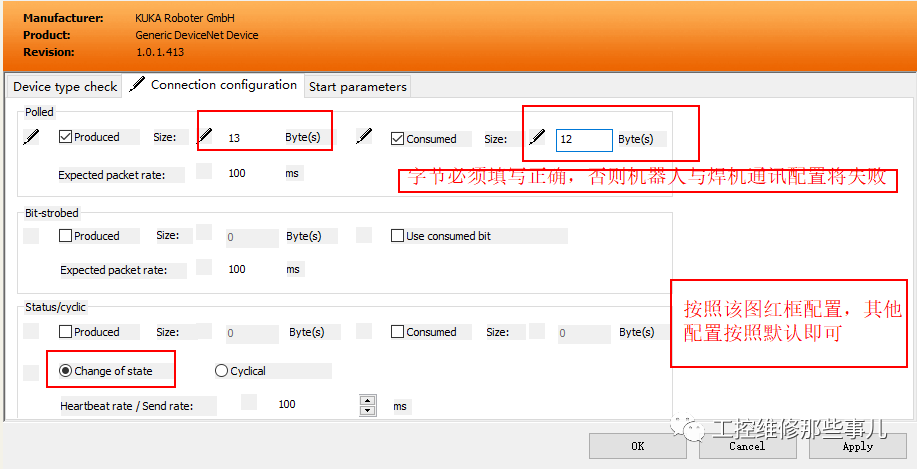
”→“KUKA Extension Bus (STS-X44)”→“EK1100 EtherCAT Coupler(2A E-Bus)”→“EL6752 DeviceNet Master”→“DeviceNet IO”,双击“Generic DeviceNet Device”,弹出 DeviceNet 设备设置界面
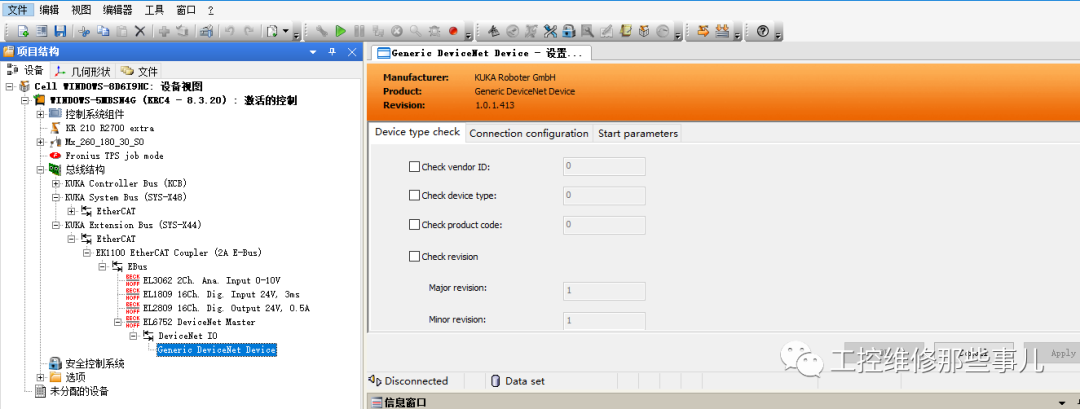
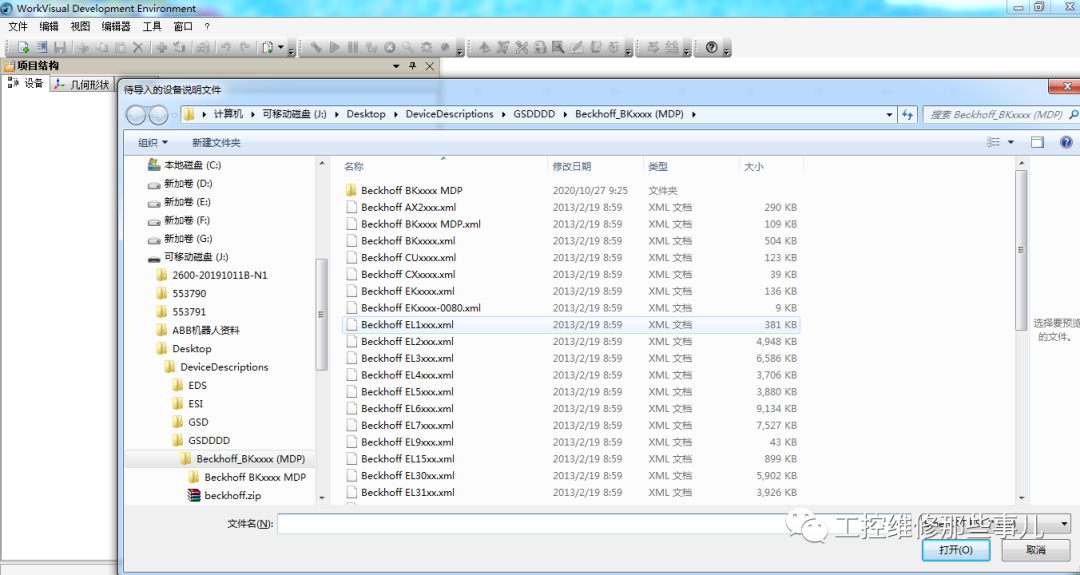
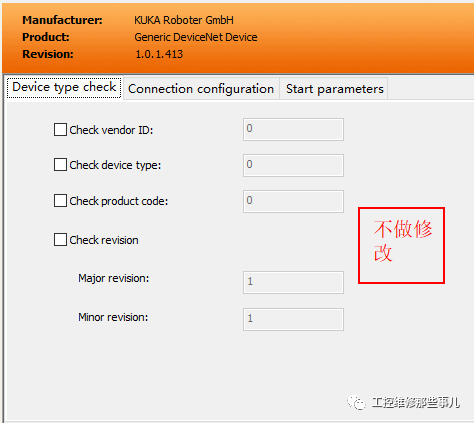
3. 设置参数③点“继续workvisual 将自动分析将要设备说明文件,随后点击完成,设备说明文件导入workvisual

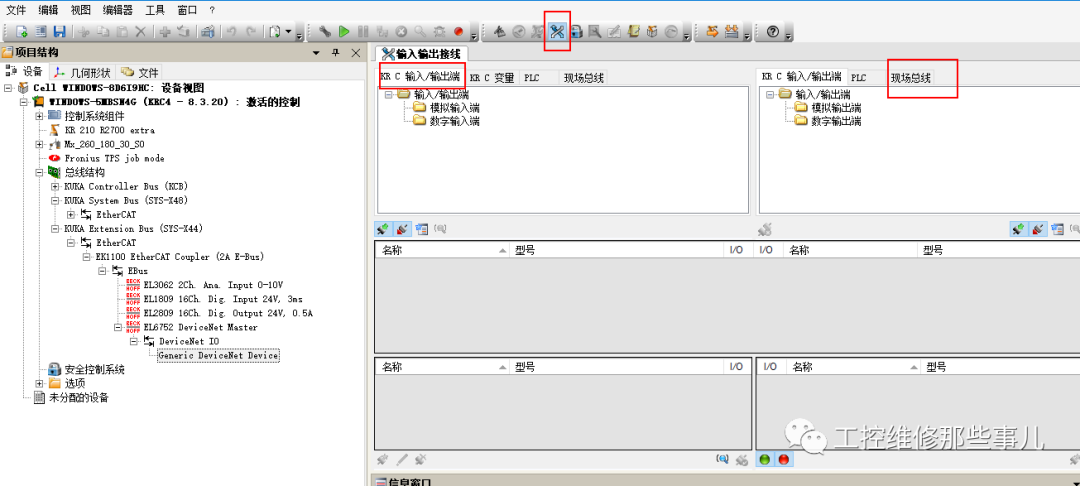
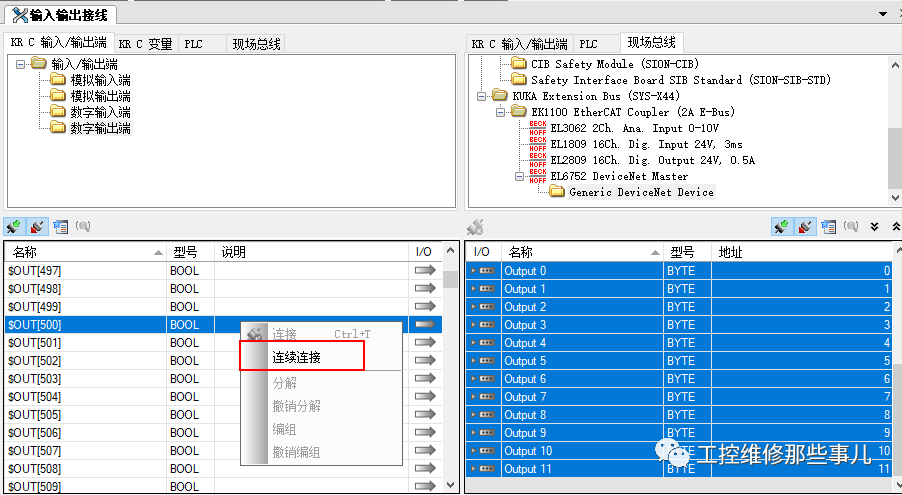
4. 打开输入输出信号配置画面
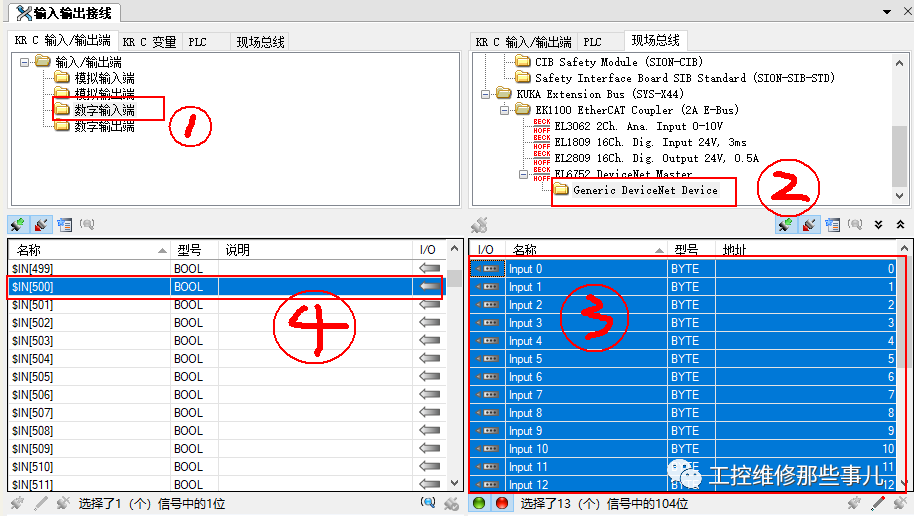
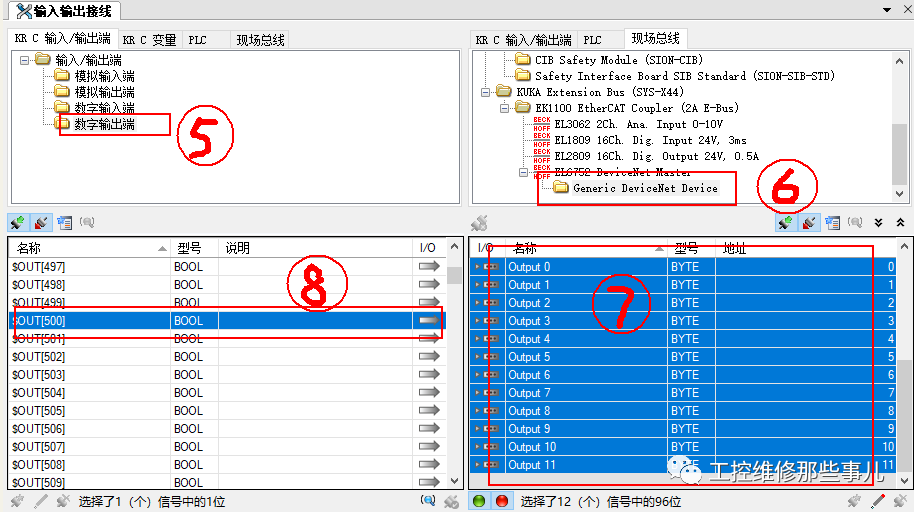
5. 根据下图操作步骤,将福尼斯焊接 I/O 信号与机器人信号关联,例子以机器人输入输出500之后与福尼斯焊机进行信号关联
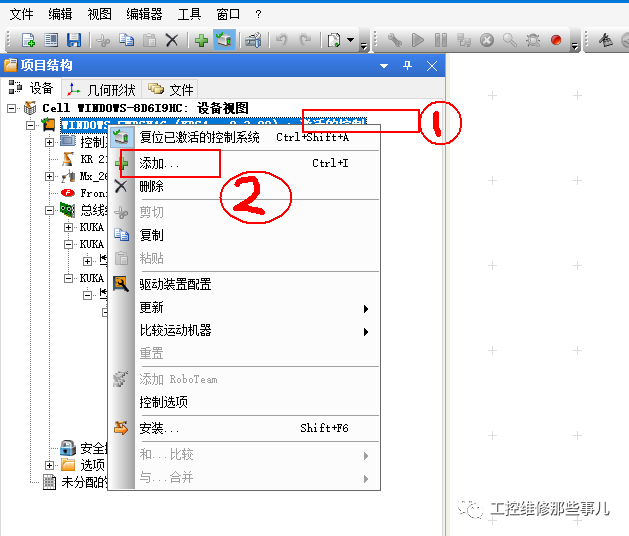
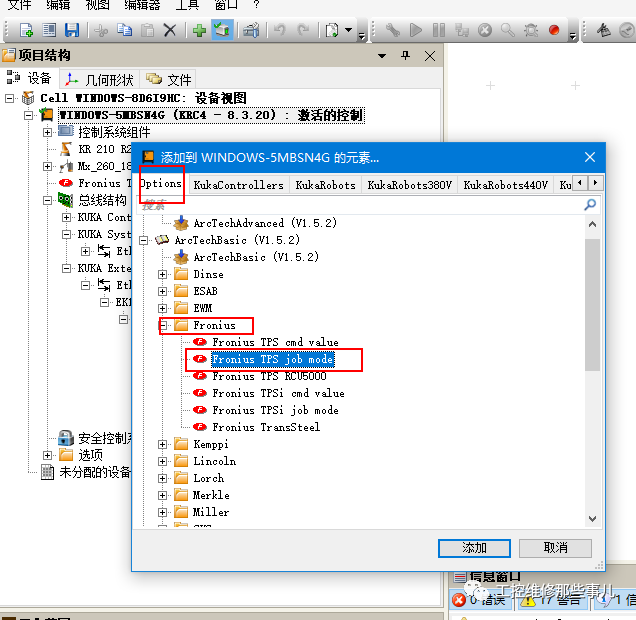
6. 添加福尼斯焊机程序包
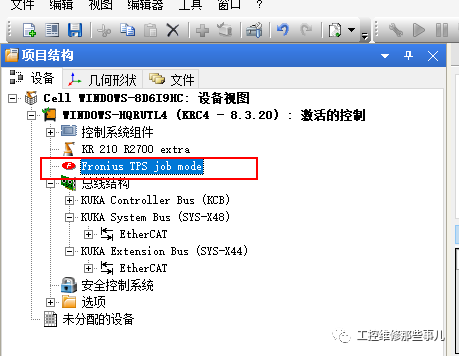
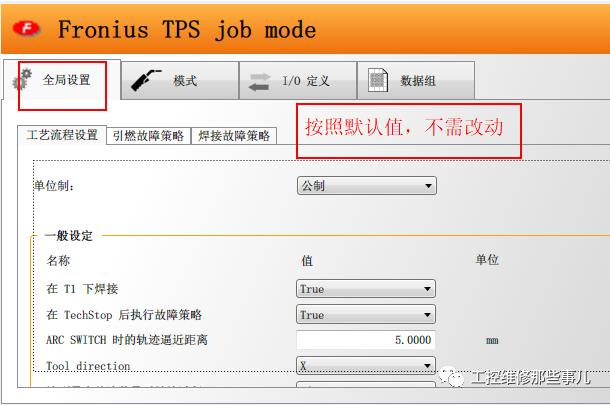
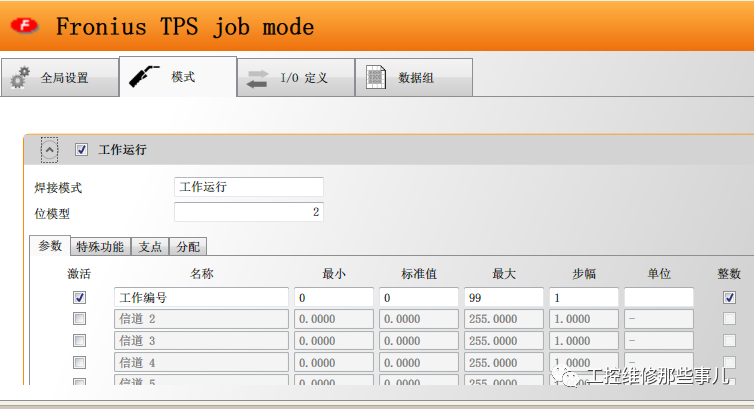
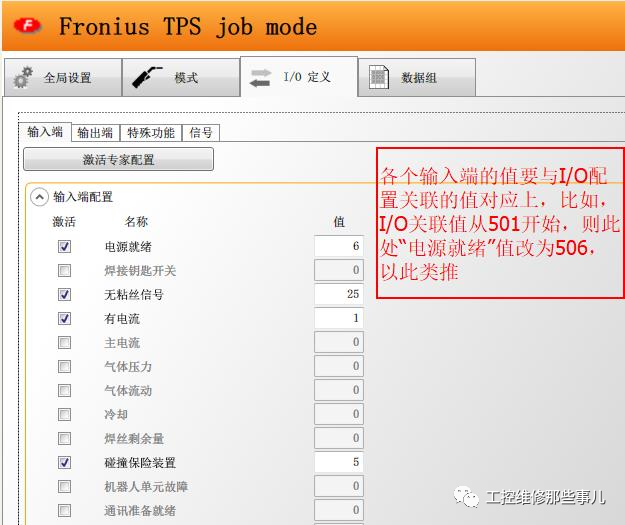
7. 双击新添加的“Fronius TPS job mode”设置焊接参数
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
疆鸿智能Ethernet/IP转DeviceNet,库卡机器人智联枢纽,破壁协同高效智造2026-03-31 279
-
Profinet转Ethernet IP网关连接库卡机器人问答式精简配置指南2026-03-24 786
-
疆鸿智能DEVICENET转PROFIBUS网关:让库卡机器人与西门子PLC“同声传译”2026-03-10 380
-
疆鸿智能EtherCAT牵手DeviceNet库卡机器人:汽车玻璃产线的无界对话2026-02-26 382
-
库卡机器人Ethernet/IP通讯设置手册2022-02-28 3022
-
KUKA库卡机器人MGV电源模块维修PH1013-28402022-01-12 1677
-
库卡机器人伺服电机维修常见故障现象有什么?怎么维修?2021-11-12 4780
-
库卡机器人有限公司培训资料之库卡机器人编程C4教程2021-11-05 1689
-
KUKA机器人伺服驱动模块维修2021-09-17 1887
-
关于库卡机器人保养注意事项2021-09-08 2575
-
库卡机器人的软PLC详细介绍2021-03-07 2336
-
库卡机器人编程基础手册免费下载2020-04-23 2666
-
库卡机器人的机器人的使用说明手册下载2018-03-27 2528
全部0条评论

快来发表一下你的评论吧 !
