

ABB机器人添加外部轴(导轨)
机器人
554人已加入
描述
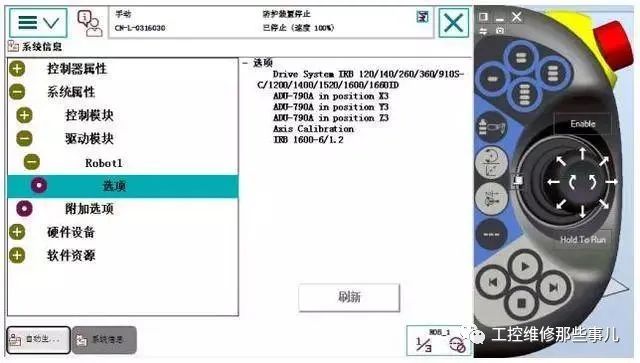
01系统key要有外部轴选项,并且用该key做好系统,如下(下图示例为可以添加3个外轴驱动)
02点击打开robotstudio,找到下图界面:
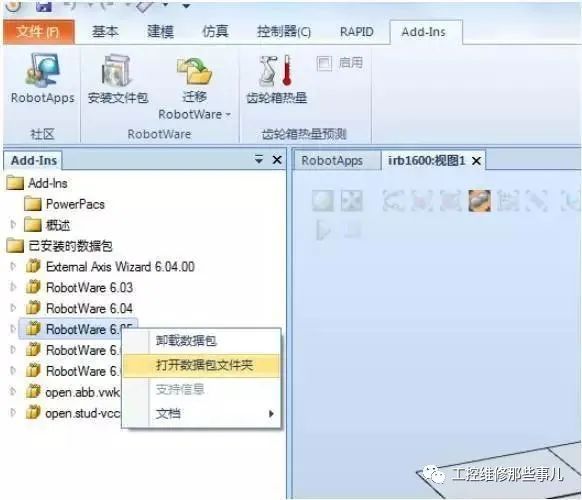
03寻找以下的路径
…ABB.RobotWare-6.05.0129RobotPackagesRobotWare_RPK_6.05.0129utilityAdditionalAxisTrack
04如下图所示,表示四个驱动柜,正常情况下选择第一个即可

05把M7L1B1T_DM1.cfg文件拷贝,移动到U盘里面
06abb机器人示教器控制面板点击配置,选择需要加载参数,然后重新启动

07重新启启之后,就可以观察到以下状态栏里面多了一个外部轴图标
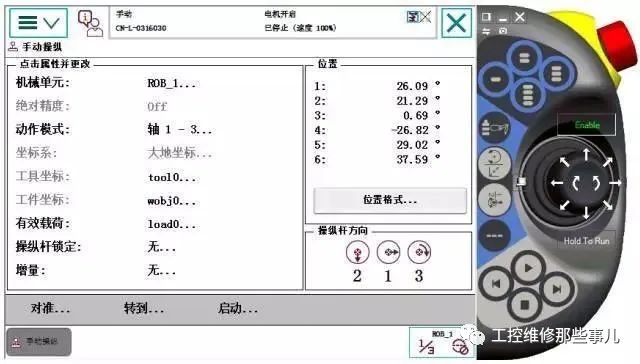
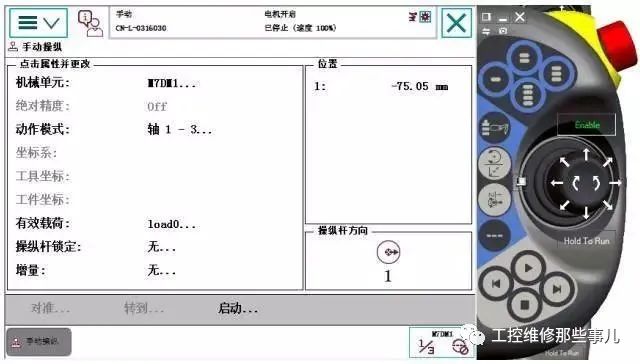
08切换到外轴随后点击启动,即可运动外轴
09在控制面板点击配置,主题选择motion里,arm下可以更改外轴上下限,导轨的单位是米(M)

10Mechanical Unit改外轴名字
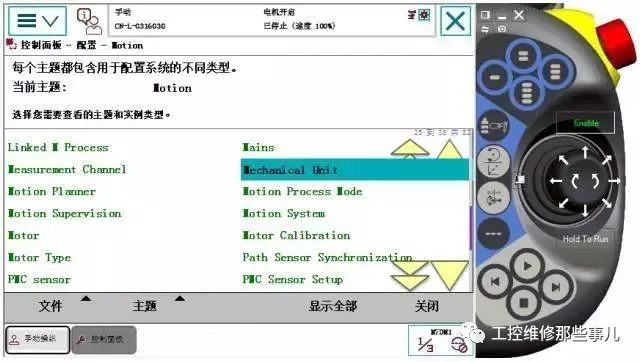
11更改名称为track_1

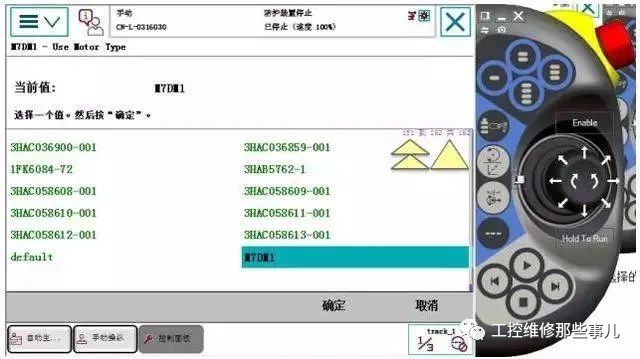
12在控制面板里面的配置,主题选择在motion里面,点击motor,这里可以改选择的motor-type
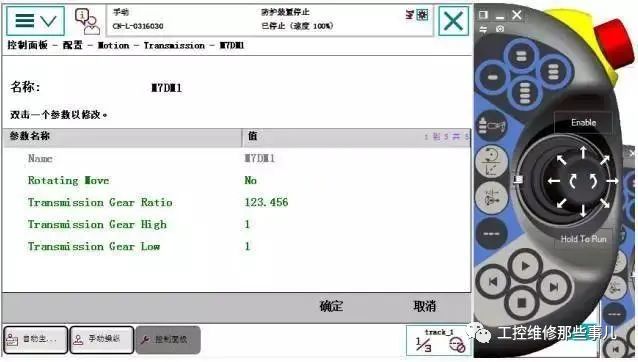
13在控制面板-配置,主题选择motion里,找到transmission,可以修改减速比
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ABB IRB5400-喷涂工业机器人2015-01-14 10159
-
ABB焊接机器人问题2017-10-16 5663
-
单轴与多轴机器人的优缺点PK(深度总结)2017-11-23 3714
-
ABB机器人维修保养指南2020-08-19 6039
-
ABB机器人发生不一致路径精确性故障维修2020-09-09 2447
-
ABB机器人实训平台实验2021-07-01 2790
-
工业机器人仿真与编程2021-09-07 2436
-
ABB六轴工业机器人IRB120技术参数2015-12-23 5075
-
如何添加ABB机器人添加外部轴(导轨)2020-06-19 9803
-
ABB六轴机器人与西门子1500PLC使用手册2021-05-07 2634
-
ABB机器人线速度_青岛ABB机器人发生电源故障维修2022-01-11 2525
-
ABB工业机器人安装系统添加外轴步骤(适用IRC5系统)2022-08-26 4303
-
焊接机器人的外部轴的作用是什么?2023-07-11 2114
-
如何为ABB机器人添加外部轴(导轨)2023-08-24 3574
-
abb机器人系统如何添加选项2024-06-17 5699
全部0条评论

快来发表一下你的评论吧 !
