

卡尔曼滤波器递归算法笔记整理
电子说
1.4w人已加入
描述
后面准备抽时间把DR_CAN老师的卡尔曼滤波的视频的笔记也会做一下整理。
主要还是心里有个执念,以前在做智能车比赛的时候,需要对六轴传感器做滤波角度计算的。这部分代码则只是将学长的代码copy之后,并不懂其中的原理。
所以其中的一个目的:就是把笔记做完,再看看原来的代码,那是曾经的熟悉且鞭辟近里。
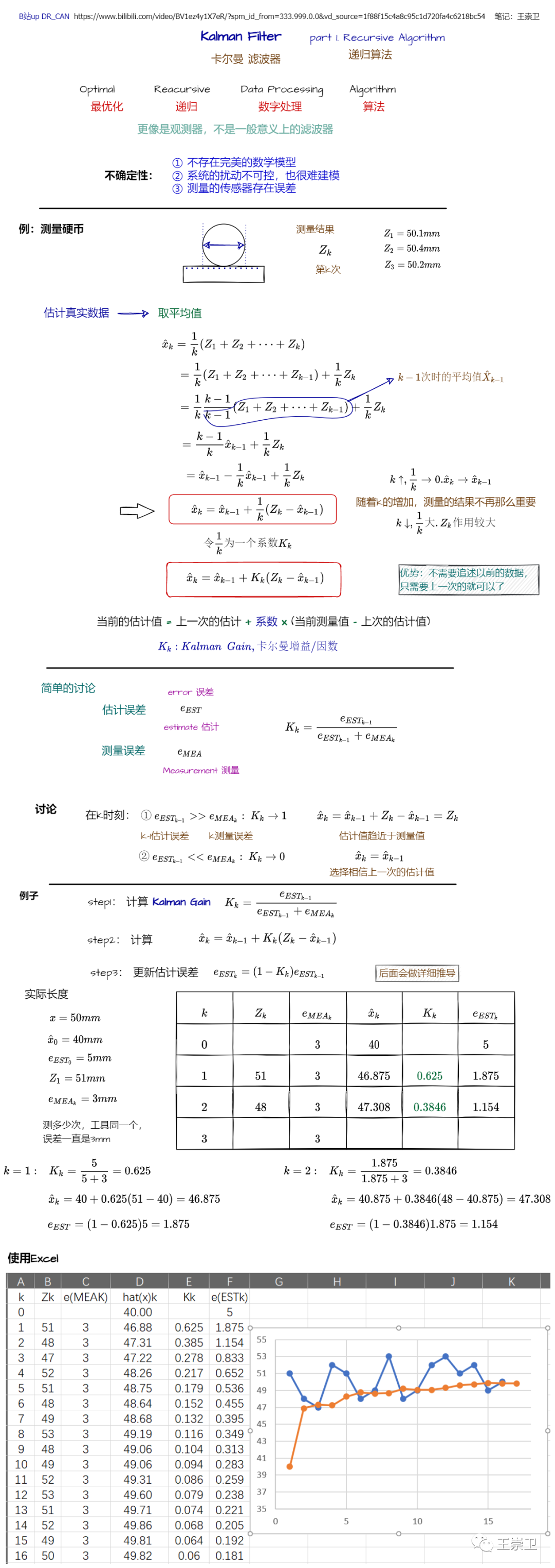
卡尔曼滤波器
更像是观测器,不是一般意义上的滤波器。
现实中的大量不确定性
不存在完美的数学模型
系统的扰动不可控,很难建模
测量的传感器存在误差
卡尔曼增益
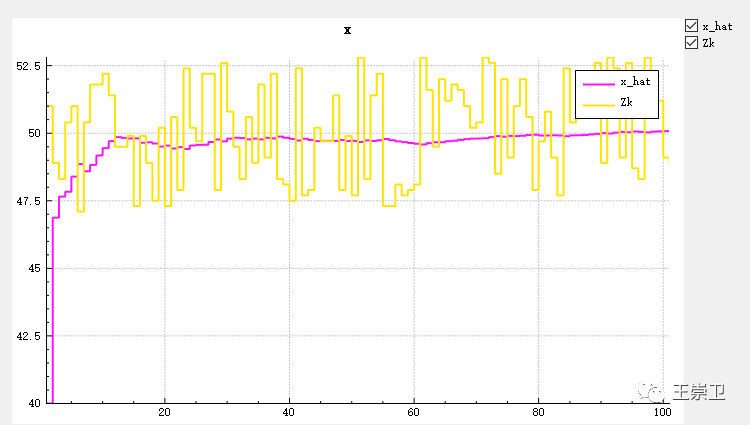
qt的仿真:
老师用Excel做的图,我用ctrlsim也做了一个简单的仿真。
https://gitee.com/wang_chong_wei/CtrlSim
https://github.com/chongweiwang/CtrlSim
CtrlSim_TI_SMO观测器
[现代控制理论]3-5_连续系统离散化
CtrlSim_电机控制。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
卡尔曼滤波器的特性及仿真2024-11-04 1441
-
卡尔曼滤波算法的基本原理2023-12-07 4634
-
卡尔曼滤波(KF)与扩展卡尔曼(EKF)2023-05-10 806
-
卡尔曼滤波器原理分析2023-05-09 1832
-
卡尔曼滤波器的基本原理2022-03-21 6743
-
卡尔曼滤波器的使用原理2021-08-17 1413
-
基于卡尔曼滤波器的PID设计教程2021-06-03 1135
-
使用FPGA实现自适应卡尔曼滤波器的设计论文说明2021-01-22 1248
-
图解卡尔曼滤波器2018-02-07 5047
-
一种基于增量式卡尔曼滤波器的PMSM转速滤波算法_肖曦2017-01-08 1084
-
卡尔曼滤波器参数分析与应用方法研究2016-06-21 863
-
卡尔曼滤波器算法(C语言)2011-10-24 105057
-
卡尔曼滤波器原理2008-07-14 1289
全部0条评论

快来发表一下你的评论吧 !
