

Matlab航迹规划仿真—A*算法
描述
1. 初始化参数
主要参数:
地图大小
起始点和目标点坐标
clc clear all m = 30;n = 30; Spoint = [3 3]; %起始点坐标 Epoint = [29 22]; %目标点坐标
2. 构建地图
-inf表示不可到达的障碍物点
%%构建地图 for i = 1:m+2 if i == 1 for j = 1:n+2 Matrix(i,j) = -inf; end elseif i == m+2 for j = 1:n+2 Matrix(i,j) = -inf; end else for j = 1:n+2 if ((j == 1)|(j == n+2)) Matrix(i,j) = -inf; else Matrix(i,j) = inf; end end end end %%障碍 for j=2:10 Matrix(5,j)=-inf; for j=2:15 Matrix(24,j)=-inf; for j=9:24 %for j=6:24 Matrix(10,j)=-inf; for j=20:31 Matrix(15,j)=-inf; for j=5:20 Matrix(20,j)=-inf; for j=18:27 Matrix(28,j)=-inf; for i=2:6 Matrix(i,18)=-inf; for i=17:20 Matrix(i,5)=-inf; for i=23:25 Matrix(i,20)=-inf; for i=13:17 Matrix(i,13)=-inf; end end end end end end end end end end %end % 显示地图 %subplot(2,2,1); h1 = plot(Spoint(1),Spoint(2),'gO'); hold on h2 = plot(Epoint(1),Epoint(2),'rO');
3. A*算法搜索路径
%%寻路 Matrix(Spoint(1),Spoint(2))=0; Matrix(Epoint(1),Epoint(2))=inf; G=Matrix; F=Matrix; openlist=Matrix; closelist=Matrix; parentx=Matrix; parenty=Matrix; openlist(Spoint(1),Spoint(2)) =0; %closelist(Epoint(1),Epoint(2))=inf; for i = 1:n+2 for j = 1:m+2 k = Matrix(i,j); if(k == -inf) %subplot(2,2,1); h3 = plot(i,j,'k.'); % elseif(k == inf) % show green feasible point % %subplot(2,2,1); % plot(i,j,'gh'); % else % %subplot(2,2,1); % plot(i,j,'gh'); end hold on end end axis([0 m+3 0 n+3]); %subplot(2,2,1); plot(Epoint(1),Epoint(2),'b+'); %subplot(2,2,1); plot(Spoint(1),Spoint(2),'b+'); while(1) num=inf; for p=1:m+2 for q=1:n+2 if(openlist(p,q)==0&&closelist(p,q)~=1) Outpoint=[p,q]; if(F(p,q)>=0&&num>F(p,q)) num=F(p,q); Nextpoint=[p,q]; end end end end closelist(Nextpoint(1),Nextpoint(2))=1; for i = 1:3 for j = 1:3 k = G(Nextpoint(1)-2+i,Nextpoint(2)-2+j); if(i==2&&j==2|closelist(Nextpoint(1)-2+i,Nextpoint(2)-2+j)==1) continue; elseif (k == -inf) G(Nextpoint(1)-2+i,Nextpoint(2)-2+j) = G(Nextpoint(1)-2+i,Nextpoint(2)-2+j); closelist(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=1; elseif (k == inf) distance=((i-2)^2+(j-2)^2)^0.5; G(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=G(Nextpoint(1),Nextpoint(2))+distance; openlist(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=0; % H=((Nextpoint(1)-2+i-Epoint(1))^2+(Nextpoint(2)-2+j-Epoint(2))^2)^0.5;%欧几里德距离启发函数 H_diagonal=min(abs(Nextpoint(1)-2+i-Epoint(1)),abs(Nextpoint(2)-2+j-Epoint(2)));%比较复杂的对角线启发函数 H_straight=abs(Nextpoint(1)-2+i-Epoint(1))+abs(Nextpoint(2)-2+j-Epoint(2)); H=sqrt(2)*H_diagonal+(H_straight-2*H_diagonal); % H=max(abs(Nextpoint(1)-2+i-Epoint(1)),abs(Nextpoint(2)-2+j-Epoint(2)));%比较简单的对角线函数 F(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=G(Nextpoint(1)-2+i,Nextpoint(2)-2+j)+H; parentx(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=Nextpoint(1); parenty(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=Nextpoint(2); else distance=((i-2)^2+(j-2)^2)^0.5; if(k>(distance+G(Nextpoint(1),Nextpoint(2)))) k=distance+G(Nextpoint(1),Nextpoint(2)); % H=((Nextpoint(1)-2+i-Epoint(1))^2+(Nextpoint(2)-2+j-Epoint(2))^2)^0.5; %欧几里德距离启发函数 H_diagonal=min(abs(Nextpoint(1)-2+i-Epoint(1)),abs(Nextpoint(2)-2+j-Epoint(2)));%比较复杂的对角线启发函数 H_straight=abs(Nextpoint(1)-2+i-Epoint(1))+abs(Nextpoint(2)-2+j-Epoint(2)); H=sqrt(2)*10*H_diagonal+10*(H_straight-2*H_diagonal); % H=max(abs(Nextpoint(1)-2+i-Epoint(1)),abs(Nextpoint(2)-2+j-Epoint(2)));%比较简单的对角线函数 F(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=k+H; parentx(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=Nextpoint(1); parenty(Nextpoint(1)-2+i,Nextpoint(2)-2+j)=Nextpoint(2); end end if(((Nextpoint(1)-2+i)==Epoint(1)&&(Nextpoint(2)-2+j)==Epoint(2))|num==inf) parentx(Epoint(1),Epoint(2))=Nextpoint(1); parenty(Epoint(1),Epoint(2))=Nextpoint(2); break; end end if(((Nextpoint(1)-2+i)==Epoint(1)&&(Nextpoint(2)-2+j)==Epoint(2))|num==inf) parentx(Epoint(1),Epoint(2))=Nextpoint(1); parenty(Epoint(1),Epoint(2))=Nextpoint(2); break; end end if(((Nextpoint(1)-2+i)==Epoint(1)&&(Nextpoint(2)-2+j)==Epoint(2))|num==inf) parentx(Epoint(1),Epoint(2))=Nextpoint(1); parenty(Epoint(1),Epoint(2))=Nextpoint(2); break; end end P=[]; s=1; while(1) if(num==inf) break; end %subplot(2,2,1); h4 = plot(Epoint(1),Epoint(2),'b+'); P(s,:)=Epoint; s=s+1; % pause(1); xx=Epoint(1); Epoint(1)=parentx(Epoint(1),Epoint(2)); Epoint(2)=parenty(xx,Epoint(2)); if(parentx(Epoint(1),Epoint(2))==Spoint(1)&&parenty(Epoint(1),Epoint(2))==Spoint(2)) %subplot(2,2,1); plot(Epoint(1),Epoint(2),'b+'); P(s,:)=Epoint; break; end end P(s+1,:)=Spoint; legend([h1,h2,h3,h4],'起始点','目标点','障碍物','航迹点'); count=0; for i=2:12 for j=2:12 if(G(i,j)~=inf&&G(i,j)~=-inf) count=count+1; end end end count
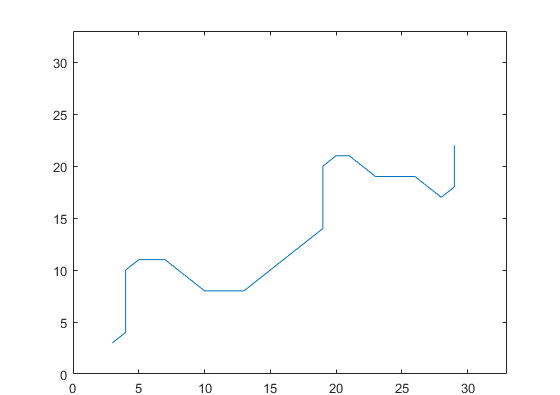
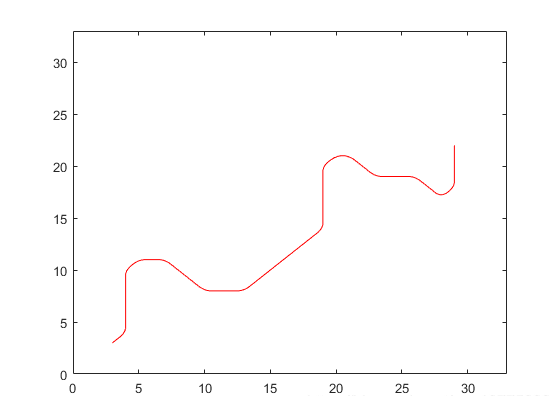
4. 路径优化
%将得到的折现曲线拟合成光滑的曲线 P=P'; a=[]; b=[]; a=P(1,:); b=P(2,:); figure %subplot(2,2,3); plot(a,b); axis([0,n+3,0,n+3]); values = spcrv([[a(1) a a(end)];[b(1) b b(end)]],3); figure %subplot(2,2,4); plot(values(1,:),values(2,:),'r'); axis([0,m+3,0,m+3]);
5. 效果图
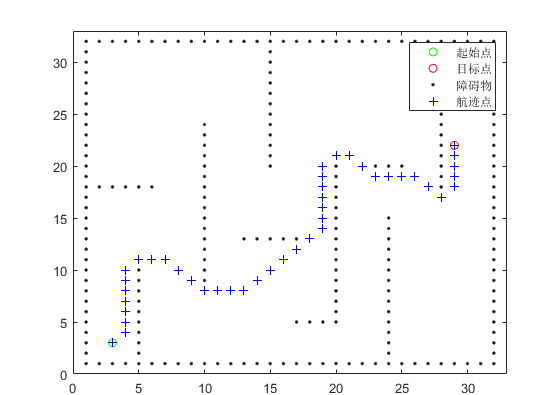
A*路径
优化后路径
6. 下载链接
直接复制到matlab即可使用,或者也可以点击下载。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
怎么使用Matlab进行电机控制算法仿真?2018-07-13 8740
-
典型雷达航迹的仿真与实现2019-07-10 4525
-
基于遗传算法的PID 控制及其MATLAB 仿真2009-06-11 1069
-
多传感器异步航迹融合算法与仿真2009-08-07 724
-
基于半实物仿真系统的多假目标航迹欺骗研究2012-07-06 741
-
MATLAB教程_MATLAB仿真_MATLAB软件下载2012-10-19 15033
-
基于改进RRT算法的无人机航迹规划2013-07-25 1248
-
PID算法Matlab仿真程序和C程序2015-11-20 1253
-
基于复杂度分析的改进A_算法飞行器航迹规划_丛林虎2017-03-17 947
-
基于模糊聚类的多雷达航迹关联算法2017-12-18 985
-
一种用于内层规划的改进粒子群算法2017-12-19 888
-
模糊航迹关联算法的分析及改进2021-03-16 1230
-
非线性整数规划的遗传算法及MATLAB程序下载2021-06-15 1128
-
基于启发式搜索算法的无人机航迹规划2021-07-02 974
-
一类新算法研究智能飞行器航迹规划问题2022-03-12 1027
全部0条评论

快来发表一下你的评论吧 !
