

分享一下运动控制器位置锁存功能的应用
描述
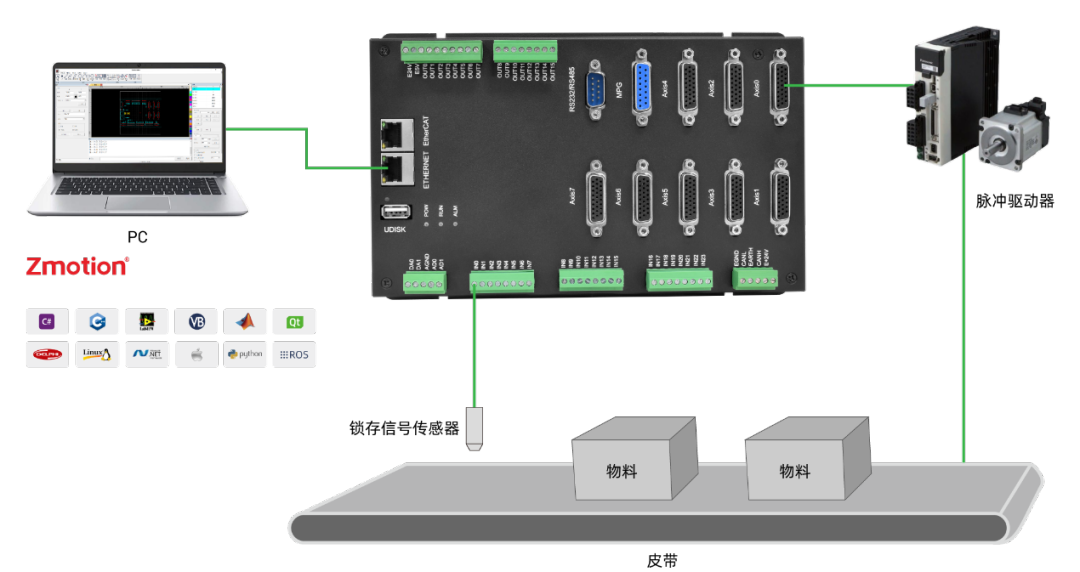
今天,正运动小助手给大家分享一下运动控制器位置锁存功能的应用,以ZMC408CE运动控制器为例,介绍多种锁存模式的用法,用户可根据自身需求灵活选择。
01 锁存功能
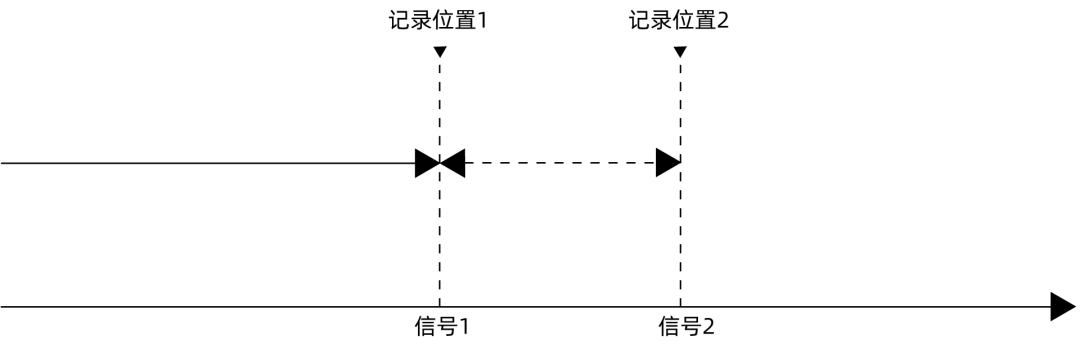
锁存功能的作用就是当外部io信号触发时,立即响应,锁定当前的电机/编码器的位置,通常用来锁定流水线上碰到光纤传感器时的产品位置、锁定包装材料上色标的位置等。
一、锁存功能的特点:
1.支持编码器轴、总线轴、脉冲轴和虚拟轴锁存(不同型号的控制器支持锁存的轴类型不同);
2.支持单次锁存和高速连续锁存模式;
3.支持4通道同时锁存,分别为R0、R1、R2、R3四个锁存通道,最多支持8个锁存口同时锁存,锁存响应速度快;
4.带编码器反馈时锁存MPOS的值,没有带编码器反馈时锁存DPOS的值。
不同型号的控制器支持的锁存通道数不同,是否支持锁存功能与锁存对应的输入口参见硬件手册。
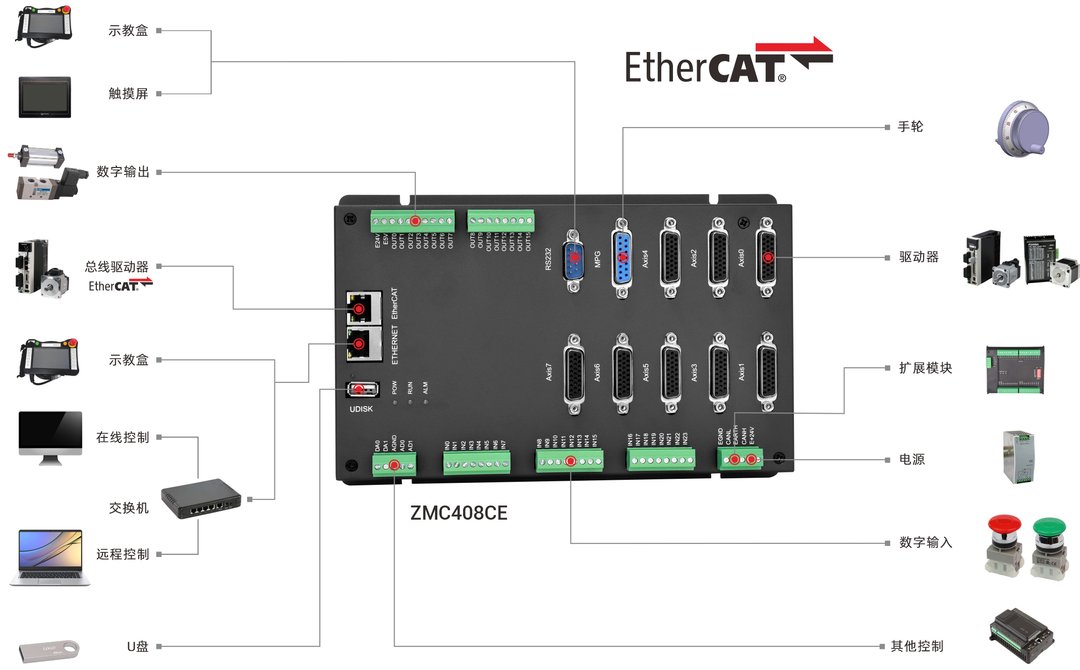
本文例子基于ZMC408CE控制器测试,此型号支持4个锁存通道,硬件接口为IN0-IN3。
通讯接口包含RS232、RS485、EtherNET以太网、CAN总线、EtherCAT总线和U盘接口,板载8路差分脉冲输出接口(包含编码器输入),1个专用手轮接口,还提供了AD/DA模拟量接口。
ZMC408CE支持EtherCAT总线连接,支持最快500μs的刷新周期,支持最多达32轴运动控制(8脉冲轴+EtherCAT轴/编码器轴/虚拟轴),支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等;采用优化的网络通讯协议可以实现实时的运动控制。
ZMC408CE还支持8通道PWM输出,支持硬件比较输出、硬件定时器、运动中精准输出等。
二、实现锁存的步骤
1.锁存功能使用方法
(1)确定当前硬件条件是否满足锁存需求,需要确定锁存位置的轴,IO信号接入支持锁存的输入口IN;
(2)设置锁存输入映射口REG_INPUT,作用是将锁存的通道R0/R1/R2/R3对应到物理输入口IN,需要输入口支持锁存功能;
(3)设置锁存模式REGIST,需根据锁存的轴类型选择;
(4)等待锁存触发MARK / MARKB / MARKC / MARKD,锁存触发了变为真;
(5)锁存完成打印锁存位置信息REG_POS / REG_POSB / REG_POSC / REG_POSD;
(6)可读取锁存位置起始坐标和结束坐标,锁存位置可被其他指令调用。
2.锁存相关指令
锁存相关指令一览表:
| 指 令 | 说 明 | 用 法 |
| REGIST | 设置锁存模式 | REGIST(模式值) |
| REG_INPUTS | 锁存通道映射到输入口 | REG_INPUTS=$输入口编号 |
| MARK | 判断锁存是否触发 | WAIT UNTIL MARK |
| MARKB | 判断第二个锁存是否触发 | WAIT UNTIL MARKB |
| MARKC | 判断第三个锁存是否触发 | WAIT UNTIL MARKC |
| MARKD | 判断第四个锁存是否触发 | WAIT UNTIL MARKD |
| REG_POS | 保存锁存的测量反馈位置 | 读取/打印REG_POS |
| REG_POSB | 返回锁存2的测量反馈位置 | 读取/打印REG_POSB |
| REG_POSC | 返回锁存3的测量反馈位置 | 读取/打印REG_POSC |
| REG_POSD | 返回锁存4的测量反馈位置 | 读取/打印REG_POSD |
| OPEN_WIN | 锁存触发的开始坐标范围点 | OPEN_WIN=POS |
| CLOSE_WIN | 锁存触发的结束坐标范围点 | CLOSE_WIN=POS |
REG_INPUTS映射锁存输入、REGIST设置锁存的模式、MARK / MARKB / MARKC / MARKD判读锁存是否触发、REG_POS / REG_POSB / REG_POSC / REG_POSD成功锁存之后位置存储。
当锁存产生时,对应锁存通道的MARK / MARKB / MARKC / MARKD会被设置为ON,同时锁存到的位置会被存储在参数REG_POS / REG_POSB / REG_POSC / REG_POSD内。
三、REG_INPUTS映射说明
REG_INPUTS映射规则如下,REGIST锁存模式的设置需配合REG_INPUTS而设置。
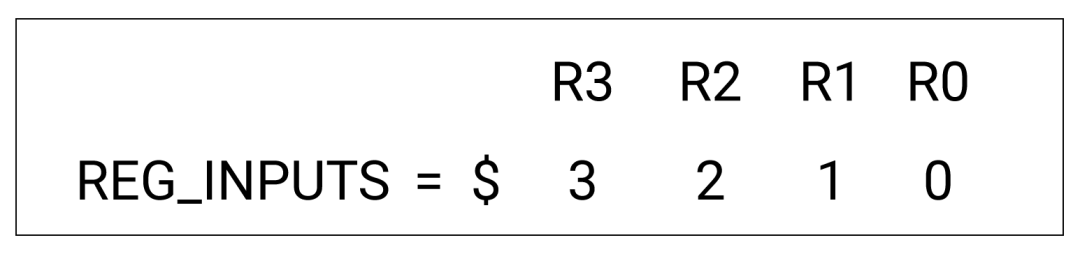
例如:
REG_INPUTS = $3210,则表示R3,R2,R1,R0分别对应输入口3,2,1,0
REG_INPUTS = $1023,则表示R3,R2,R1,R0分别对应输入口1,0,2,3
REG_INPUTS = $1000,则表示R3,R2,R1,R0分别对应输入口1,0,0,0 之所以这样设置是因为REGIST模式匹配R0、R1、R2、R3信号虽然不是物理的IO通道,却能带来最大的灵活性。 输出信号R0实际可以对应设备上的IN(0)...IN(7)中的任意一个(可选的输入通道必须是硬件手册指定的锁存通道),或者R0和R3都对应同一个输入口。
四、REG_POS锁存位置说明
使用的本地IO,可以通过REG_INPUTS来锁存通道的映射,不同的锁存信号通道锁存的数据存储的位置不同,如下表,详情参见REGIST指令说明。
| R信号 | 锁存状态 | 锁存数值 |
| R0 | Mark | Reg_Pos |
| R1 | MarkB | Reg_PosB |
| R2 | MarkC | Reg_PosC |
| R3 | MarkD | Reg_PosD |
| Z | 不定 | 不定 |
02 REGIST锁存模式
REGIST设置锁存模式,根据要锁存的轴类型选择合适的锁存模式,锁存模式参见下文,有单次锁存和连续锁存两种。
不同的锁存方式,锁存信号的触发标志不同,锁存位置数据存储的位置也不同。
不同轴类型支持的锁存通道:
(1)编码器轴、带反馈的脉冲轴类型一般采用R0,R1,Z脉冲这三种锁存;
(2)无反馈的脉冲轴和虚拟轴采用R0,R1锁存;
(3)EtherCAT或RTEX总线轴类型采用R2,R3锁存;
(4)另外EtherCAT总线可以使用驱动器自身的锁存模式,详情参见驱动器手册说明。
语法一:单次锁存
REGIST(mode)
mode:锁存方式如下表。
| 值 | 描 述 |
| 1 | 当Z脉冲上升沿时的绝对位置送到REG_POS |
| 2 | 当Z脉冲下降沿时的绝对位置送到REG_POS |
| 3 | 当输入信号R0上升沿的绝对位置送到REG_POS |
| 4 | 当输入信号R0下降沿的绝对位置送到REG_POS |
| 6 | 输入信号R0上升沿时的绝对位置送到REG_POS,Z信号上升沿时的绝对位置送到REG_POSB |
| 7 | 输入信号R0上升沿时的绝对位置送到REG_POS,Z信号下降沿时的绝对位置送到REG_POSB |
| 8 | 输入信号R0下降沿时的绝对位置送到REG_POS,Z信号上升沿时的绝对位置送到REG_POSB |
| 9 | 输入信号R0下降沿时的绝对位置送到REG_POS,Z信号下降沿时的绝对位置送到REG_POSB |
| 10 | 输入信号R0上升沿时的绝对位置送到REG_POS,输入信号R1上升沿时的绝对位置送到REG_POSB |
| 11 | 输入信号R0上升沿时的绝对位置送到REG_POS,输入信号R1下降沿时的绝对位置送到REG_POSB |
| 12 | 输入信号R0下降沿时的绝对位置送到REG_POS,输入信号R1上升沿时的绝对位置送到REG_POSB |
| 13 | 输入信号R0下降沿时的绝对位置送到REG_POS,输入信号R1下降沿时的绝对位置送到REG_POSB |
| 14 | 输入信号R1上升沿时的绝对位置送到REG_POSB(14以后150804以后版本支持,每个锁存通道独立,支持4通道锁存) |
| 15 | 输入信号R1下降沿时的绝对位置送到REG_POSB |
| 16 | Z信号上升沿时的绝对位置送到REG_POSB |
| 17 | Z信号下降沿时的绝对位置送到REG_POSB |
| 18 | 输入信号R2上升沿时的绝对位置送到REG_POSC |
| 19 | 输入信号R2下降沿时的绝对位置送到REG_POSC |
| 20 | 输入信号R3上升沿时的绝对位置送到REG_POSD |
| 21 | 输入信号R3下降沿时的绝对位置送到REG_POSD |
注意:上升沿和下降沿对应的是控制器内部的硬件状态。对于ZMC系列控制器而言,由于OFF状态有效,故从无信号到有信号是下降沿;对于ECI系列控制器而言,由于ON状态有效,从无信号到有信号是上升沿。
若仍然容易混淆,建议使用前先使用下文例程简单测试一下锁存边沿,再应用于项目中。
语法二:连续锁存
通过把模式加100来支持连续锁存,锁存结果存储到TABLE里面。
REGIST(100+mode, tableindex, numes)
mode:锁存方式。
tableindex:连续锁存的内容存储的table位置,第一个table元素存储锁存的个数,后面存储锁存的坐标,最多保存个数= numes-1,溢出时循环写入。
numes:占用的table个数。
连续锁存模式分别对两个通道进行连续锁存,可以实现上下边沿的连续锁存。
(ECI20150829以上固件支持,4系列控制器20170523以上固件支持)
100+mode:只能使用单一通道的mode,加100表示使用连续锁存。
| 值 | 描述 |
| 101 | 当Z脉冲上升沿时的绝对位置送到REG_POS |
| 102 | 当Z脉冲下降沿时的绝对位置送到REG_POS |
| 103 | 当输入信号R0上升沿的绝对位置送到REG_POS |
| 104 | 当输入信号R0下降沿的绝对位置送到REG_POS |
| 114 | 输入信号R1上升沿时的绝对位置送到REG_POSB |
| 115 | 输入信号R1下降沿时的绝对位置送到REG_POSB |
| 116 | Z信号上升沿时的绝对位置送到REG_POSB |
| 117 | Z信号下降沿时的绝对位置送到REG_POSB |
| 118 | 输入信号R2上升沿时的绝对位置送到REG_POSC |
| 119 | 输入信号R2下降沿时的绝对位置送到REG_POSC |
| 120 | 输入信号R3上升沿时的绝对位置送到REG_POSD |
| 121 | 输入信号R3下降沿时的绝对位置送到REG_POSD |
| 123 | 当输入信号R0上升沿的绝对位置送到REG_POSB |
| 124 | 当输入信号R0下降沿的绝对位置送到REG_POSB |
| 133 | 当输入信号R0上升沿的绝对位置送到REG_POS,下一次切换下降沿,轮流切换。 |
| 134 | 当输入信号R0下降沿的绝对位置送到REG_POS,下一次切换上升沿,轮流切换。 |
| 135 | 当输入信号R1上升沿的绝对位置送到REG_POSB,下一次切换下降沿,轮流切换。下一次切换下降沿,轮流切换。 |
| 136 | 当输入信号R1下降沿的绝对位置送到REG_POSB,下一次切换上升沿,轮流切换。 |
03 锁存例程
1.脉冲轴(不带反馈)/虚拟轴锁存
可使用R0或R1通道,脉冲轴ATYPE=1/7,虚拟轴ATYPE=0,锁存MPOS的值(没有反馈时MPOS为假,复制DPOS)。
带反馈的情况锁存真实的编码器反馈的MPOS值,若支持Z信号,则可使用Z信号的模式。
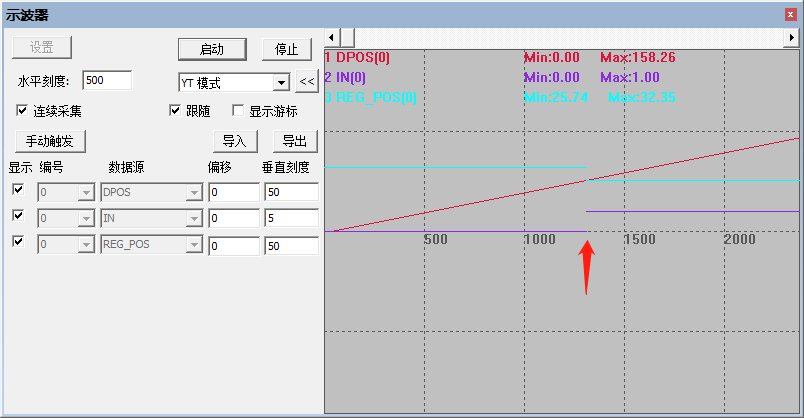
配置参考如下图:
例程如下:
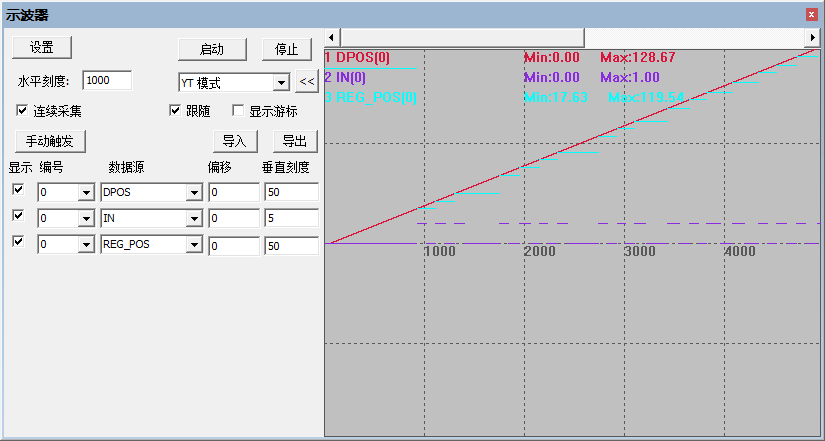
BASE(0) ATYPE=1 '脉冲轴 UNITS=100 DPOS=0 SPEED=10 ACCEL=100 DECEL=100 REG_INPUTS=0 '将R0-R3都对应输入口0,信号接入IN(0) REGIST(4) '选择R0锁存模式 TRIGGER '触发示波器 VMOVE(1) '轴运动 WAIT UNTIL MARK '等待锁存触发 PRINT REG_POS '打印锁存位置 END
从示波器采样的波形可以看出,IN(0)有信号触发锁存,REGIST(4)生效锁存此刻的DPOS位置,并存储到REG_POS。
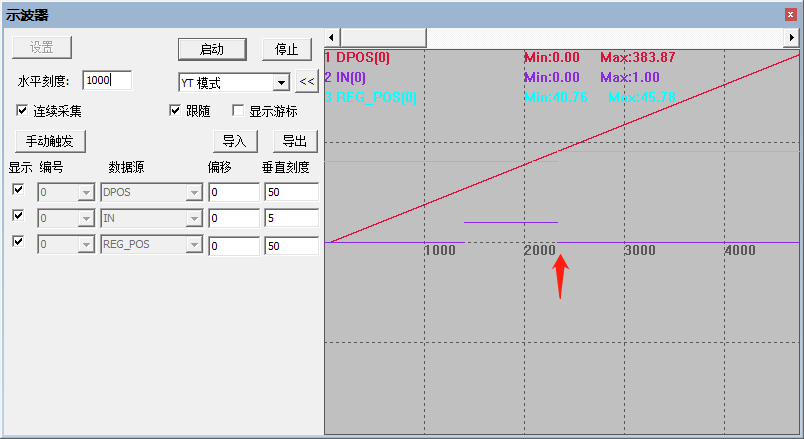
上例其他条件不变,锁存模式改为REGIST(3),锁存触发的边沿发生变化。
2.脉冲轴(带反馈)/编码器轴锁存
可使用R0、R1或Z通道(必须带Z信号的设备才支持),脉冲轴ATYPE=4/5,编码器轴ATYPE=3/6,锁存MPOS的值。
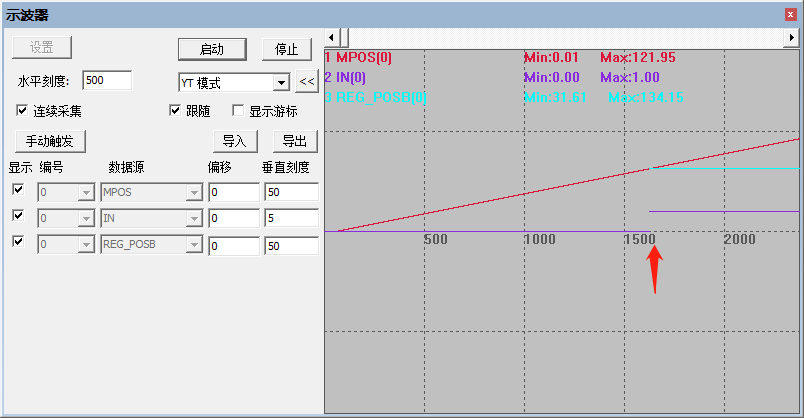
例程如下:
BASE(0) ATYPE=4 '脉冲带编码器反馈 UNITS=100 SPEED=10 ACCEL=100 DECEL=100 DPOS=0 MPOS=0 REG_INPUTS=$0 '将R0-R3都对应输入口0 ,信号接入IN(0) REGIST(15) '选择R1锁存模式 TRIGGER VMOVE(1) '轴运动 WAIT UNTIL MARKB '等待锁存触发 PRINT REG_POSB '打印锁存位置 END
从示波器采样的波形可以看出,IN(0)有信号触发锁存,锁存此刻的MPOS位置,并存储到REG_POSB。
3.多轴位置锁存
锁存多轴的位置时,需要分别对每个轴设置锁存,下例插补运动中锁存两个轴的位置。
例程如下:
BASE(0,1) ATYPE=1,1 '脉冲轴 UNITS=100,100 DPOS=0,0 SPEED=10,10 ACCEL=100,100 DECEL=100,100 REG_INPUTS=$0 '将R0-R3都对应输入口0,信号接入IN(0) REGIST(4) AXIS(0) '轴0选择R0锁存模式 REGIST(4) AXIS(1) '轴1选择R0锁存模式 TRIGGER '触发示波器 MOVE(1000,800) '轴运动 WAIT UNTIL MARK(0) AND MARK(1) '等待锁存触发 PRINT REG_POS(0), REG_POS(1) '打印轴0,轴1的锁存位置 END
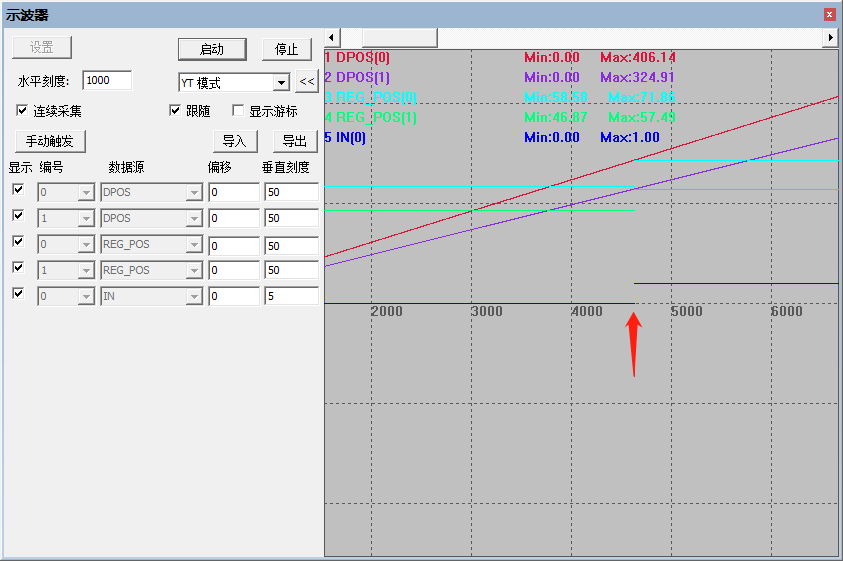
注意:多轴使用同一个锁存硬件输入口时,需采用相同的锁存R通道(如上例,模式3/4均可),需要使用不同R通道时,则需要映射到不同的硬件输入口上。
4.连续锁存模式
持续锁存信号触发后的位置,以上的轴类型均支持连续锁存模式,建议开单独任务执行连续锁存程序,不干扰其他程序的运行,可通过TABLE寄存器随时读取到锁存的次数和位置数据。
例程如下:
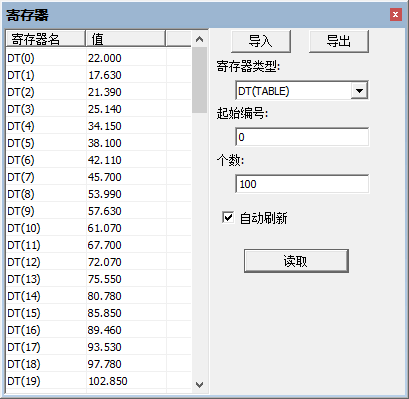
BASE(0) ATYPE=1 '脉冲轴 UNITS=100 DPOS=0 SPEED=10 ACCEL=100 DECEL=100 REG_INPUTS=$0 '将R0-R3都对应输入口0,信号接入IN(0) TRIGGER '触发示波器 VMOVE(1) '轴运动 REGIST(100+4,0,100) '连续锁存,R0通道,table(0)保存锁存次数,table(1-100)存储每次锁存的数据,超过99次后,table(0)清0,重新从table(1)记录数据WAIT UNTIL MARK
示波器捕捉连续锁存的位置数据:不需要WHILE循环就能实现连续锁存。
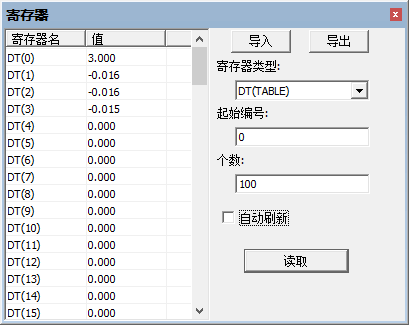
寄存器窗口读取锁存的次数和位置数据。
5.总线驱动器锁存
可使用R2、R3通道,脉冲轴ATYPE=4/5,EtherCAT和RTEX总线均支持,轴类型ATYPE=65/50,锁存MPOS的值。
采用EtherCAT总线驱动器,可使用控制器提供的锁存模式,配置方法与前文类似;也可以使用EtherCAT总线驱动器自带的锁存模式(需参考驱动器手册完成配置)。
采用EtherCAT总线驱动器自带的锁存模式,选择驱动器支持锁存的探针,接入锁存信号;例如下方驱动器,有两个探针信号输入。

注意:驱动器PDO需包含60b8h锁存的数据字典,DRIVE_PROFILE直接选择带锁存的模式测试。
例如:DRIVE_PROFILE=11,PDO配置情况如下,更多模式参见DRIVE_PROFILE指令说明。
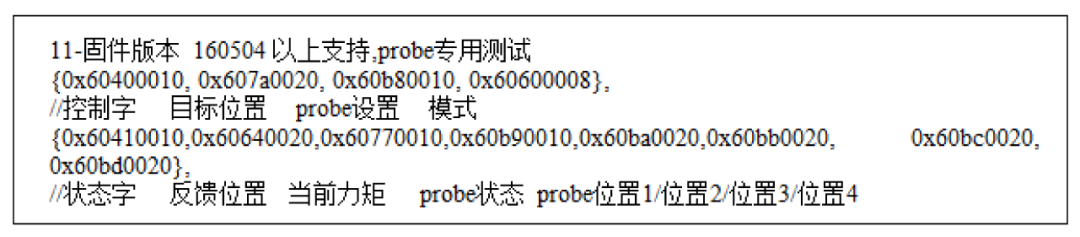
锁存模式采用REGIST提供的模式(需测试哪些模式支持),触发驱动器锁存之后,驱动器自行将锁存位置传到对应的REG_POS / REG_POSB / REG_POSC / REG_POSD,对应MARK变为真,用户无需通过驱动器数据字典获知。
例程如下:
'********************************************************************************************
'总线初始化使能程序,初始化成功方可运行下方锁存程序
'初始化配置驱动器PDO需包含锁存的数据字典,DRIVE_PROFILE选择带锁存的模式测试
'********************************************************************************************
RAPIDSTOP
WAITIDLE
DIM num,AXIS_Max,TEMP
FOR num=0 TO 7 STEP 1
BASE(num)
ATYPE(num)=0
AXIS_ADDRESS(num)=(-1<<16)+num
ATYPE(num)=0
NEXT
num=0
SLOT_SCAN(0)
IF RETURN THEN
?"总线扫描成功","设备连接数:"NODE_COUNT(0)
'i为槽位号,位轴数
FOR i=0 to NODE_COUNT(0)-1
AXIS_Max=NODE_AXIS_COUNT(0,i)'单个设备连接总数
?"AXIS_Max="AXIS_Max
IF AXIS_Max<>0 THEN
FOR j=0 TO AXIS_Max-1
AXIS_ADDRESS(num)=(i<<16)+num+1
ATYPE(num)=65 '轴映射最后一步
'units(num)=2^23/360 '单轴脉冲当量设置
DRIVE_PROFILE(num)=11 '设置PDO功能
disable_group(num) '每轴单独分组
num=num+1 '当前设备总轴数
NEXT
ELSE
?"当前设备无轴"
END
ENDIF
NEXT
?"轴映射完成!总轴数:"num
ELSE
?"总线扫描失败"
END
ENDIF
DELAY(100)
SLOT_START(0)
IF RETURN THEN
?"总线开启成功"
DELAY(100)
DATUM(0)'清除所有轴错误状态
DELAY(100)
?"开始进行轴使能"
FOR i=0 to num-1
base(i)
AXIS_ENABLE=1'单轴使能
NEXT
WDOG=1'轴使能总开关开启
?"轴使能完成"
ELSE
?"总线开启失败"
ENDIF
?"配置完成"
adasda() '调用锁存函数
END
'********************************************************************************************
'锁存函数
'选择驱动器支持锁存的探针,接入锁存信号
锁存模式采用REGIST提供的模式,触发锁存之后,驱动器将锁存位置传到REG_POS
'********************************************************************************************
WHILE 1
IF OP(0) = ON THEN
OP(0, OFF)
temp=-1
ENDIF
temp=0
WEND
GLOBAL sub adasda()
dim num, temp
num=1
temp=0
BASE(0)
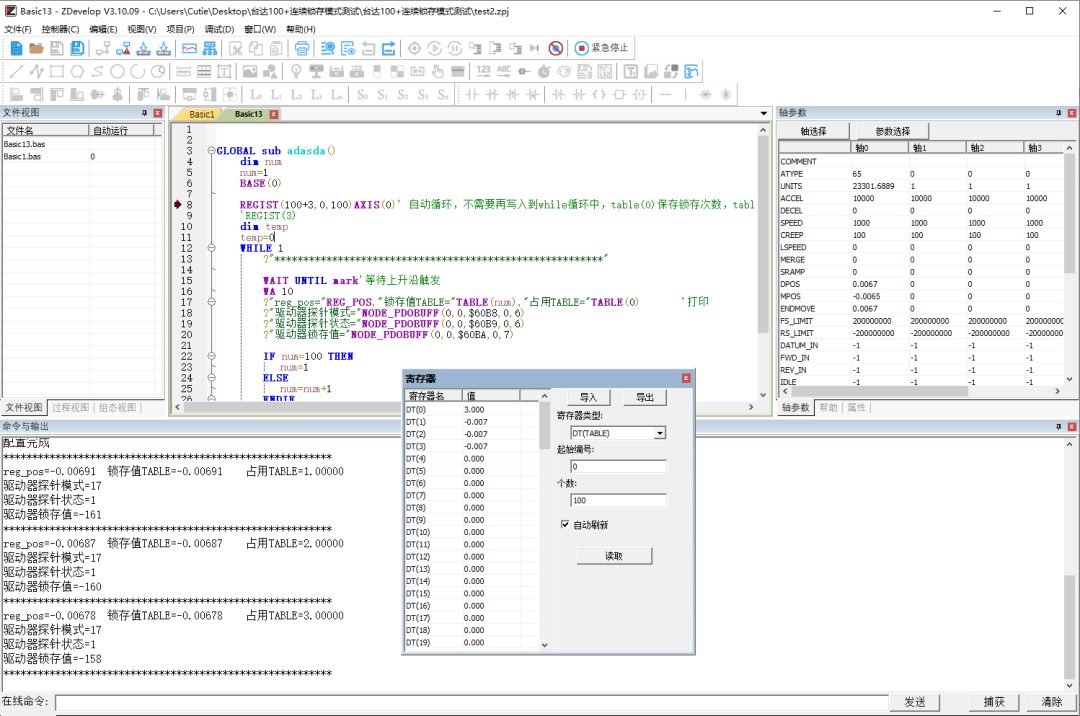
REGIST(100+3,0,100)AXIS(0)' 自动循环,不需要再写入到while循环中,table(0)保存锁存次数,table(1-100)存储每次锁存的数据超过99次后,table(0)清0,重新从table(1)记录数据
'REGIST(3)
WHILE 1
?"*********************************************************"
WA 10
?"reg_pos="REG_POS,"锁存值TABLE="TABLE(num),"占用TABLE="TABLE(0) '打印
?"驱动器探针模式="NODE_PDOBUFF(0,0,$60B8,0,6)
?"驱动器探针状态="NODE_PDOBUFF(0,0,$60B9,0,6)
?"驱动器锁存值="NODE_PDOBUFF(0,0,$60BA,0,7)
IF num=100 THEN
num=1
ELSE
num=num+1
ENDIF
WA 100 '延时1ms,防抖
wend
ENDSUB
采用连续锁存模式REGIST(100+3,0,100),使用TABLE(0)开始的100个空间保存锁存数据,其中TABLE(0)保存的是连续锁存的次数,TABLE(1)- TABLE(99)保存每次锁存的位置。
审核编辑:刘清
-
运动控制器位置锁存功能的应用2022-11-07 1250
-
高性能多轴运动控制器DMC2410功能简介2021-09-01 0
-
请问一下运动控制卡中伺服电机的规划位置与编码器位置的区别是什么?2021-10-12 0
-
简单了解一下74HC573锁存器2022-01-12 0
-
运动控制器PSO位置同步输出(一):硬件平台与PSO指令简介2022-07-18 3061
-
分析一下SR锁存器的原理2022-08-20 6920
-
硬件位置比较输出和编码器锁存:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(六)2023-12-27 483
-
锁存器的组成、功能及应用2024-07-23 3010
-
SR锁存器的功能有哪些?2024-08-28 1003
全部0条评论

快来发表一下你的评论吧 !
