

HPM6750芯片实现HMI与四轴伺服运动控制方案
描述
当前工业应用多轴伺服运动控制系统对响应时间、响应速度和稳定性等指标要求越来越高,传统四轴伺服运动控制系统多采用模块化方式集成,HMI+Ether CAT/NVUC等控制器+伺服驱动器(多个组成)的拓扑结构,所挂载的伺服驱动器越多,数据传输和处理越复杂,控制精度、实时性、同步性能也相应受限。
四轴伺服电机方案介绍
本方案单芯片实现HMI与四轴伺服运动控制,无需总线通信反馈与交互控制,片内完成所有数据采集、处理和显示,对伺服控制和四电机的同步控制效率大大提高,如下演示视频为通过UI交互下的四轴伺服电机运动。
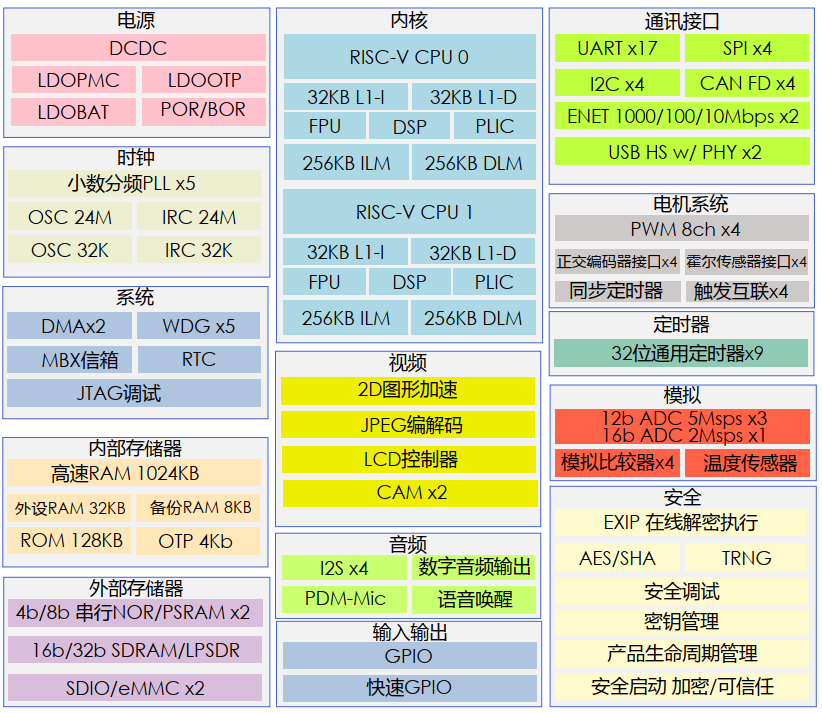
HPM6750芯片资源介绍
HPM6750采用双RISC-V内核,主频达816MHz ,凭借先楫半导体的创新总线架构、高效的L1缓存和本地存储器,创下了MCU 高于 9000 CoreMark和 4500以上 的DMIPS性能新记录,创造了RISC-V 全球主频和跑分新纪录。除了高算力RISC-V CPU,HPM6700系列产品还创造性地整合了一系列高性能外设:包括支持2D图形加速的显示系统、高速USB、千兆以太网、CAN FD等通讯接口,高速12位和高精度16位模数转换器,面向高性能电机控制和数字电源的运动控制系统。
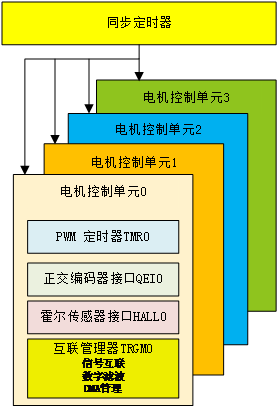
HPM6750电机控制单元介绍
HPM6750系列支持4套电机控制单元,每个单元包括1个PWM定时器,一个正交编码器接口,一个霍尔传感器接口和1个互联管理接口,配合片上提供的数模转换ADC模块和ACMP等外设,可以实现同时控制4个电机。包含1个同步定时器,可以用于4套电机控制单元间进行同步。
1、PWM定时器
支持4个PWM定时器,单个PWM支持高达28位计数,支持24个通道;
2、同步定时器
当计数器计数达到比较值会输出一个比较事件,可以连接到其他定时器用作同步;
3、正交编码器接口QEI
支持4个正交编码器接口QEI,用以测量感应电机位置信息;
4、霍尔传感器接口HALL
支持4个霍尔传感器接口HALL;
5、互联管理TRGM
支持多个外设的输入输出信号可以相互连接,使得多个外设可以相互配合使用;
支持数字滤波,互联管理器支持管理外设DMA请求;
6、模拟外设
支持3个12位ADC,支持20个输入通道,支持单端和差分输入,高达5M采样率;
支持1个16位ADC,支持8个输入通道,高达2M采样率。
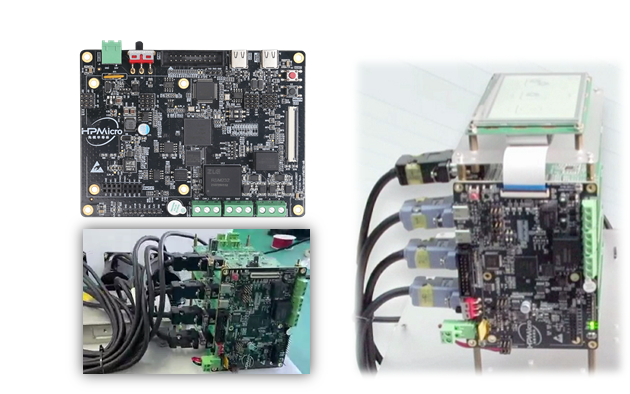
四轴伺服驱动评估板
视频中实现UI显示和四电机控制的评估为Four-Motor-HPM6750-MB评估板,该板设计上有4个电机专用接口,支持4个电机驱动板同时插入使用,同时控制4个电机。每个接口支持1路母线电压采集、3个相电流采集、6通道PWM控制,共支持4路编码器输入,硬件正交解码获取转子位置,实现伺服FOC控制。
审核编辑:郭婷
-
如何使用RT-Thread Studio创建支持HPM6750开发板的RT-Thread项目2022-06-08 2585
-
如何使用CodeViser调试先楫HPM6750开发板?2023-03-21 1217
-
请问HPM6750芯片的湿度敏感等级,***,是多少啊?2023-05-26 920
-
HPM6750和HPM6450是PIN to PIN的吗?2023-06-08 1182
-
HPM6750单片机AD的原理图与PCB封装库2022-10-21 1065
-
基于HPM6750的三轴伺服运动控制方案2022-11-24 3134
-
HPM6750开发环境搭建及快速上手2022-12-20 5744
-
对HPM6750的这几种调试方式展开介绍2023-02-01 6667
-
干货分享|基于HPM6750 CAN2.0 及 CAN- FD 操作指南2022-06-16 4950
-
大神测评 | 结果出乎意料! 先楫HPM6750 CoreMark 跑分测试2022-06-13 3827
-
测评分享 | HPM6750 能跑 openmv 啦!2022-09-01 3433
-
【深度测评】HPM6750 MCU片内16位ADC精度测试2023-10-30 4569
-
HPM6750 ADC EVK用户使用手册2023-09-19 673
-
HPM6750 从 XPI0 CB 端口启动2023-10-21 2252
全部0条评论

快来发表一下你的评论吧 !
